SmartRF Transceiver
Evaluation Board
“TrxEB”
User’s Guide
SWRU294A
�SWRU294A
Table of Contents
TABLE OF CONTENTS ......................................................................................................................... 2
LIST OF FIGURES ................................................................................................................................. 4
LIST OF TABLES ................................................................................................................................... 4
1
INTRODUCTION .......................................................................................................................... 5
2
ABOUT THIS MANUAL ............................................................................................................... 5
3
ACRONYMS AND ABBREVIATIONS......................................................................................... 6
4
GETTING STARTED ................................................................................................................... 7
4.1
SMARTRF STUDIO ...................................................................................................................... 7
4.2
INSTALLING SMARTRF STUDIO AND USB DRIVERS ....................................................................... 7
4.2.1
Cebal USB driver ...................................................................................................................... 7
4.2.2
Virtual COM port USB driver .................................................................................................... 8
5
USING THE SMARTRF TRANSCEIVER EVALUATION BOARD ............................................. 9
5.1
ABSOLUTE MAXIMUM RATINGS.................................................................................................... 10
6
SMARTRF TRANSCEIVER EVALUATION BOARD OVERVIEW ........................................... 11
6.1
USB MCU ............................................................................................................................... 12
6.1.1
SmartRF Mode ....................................................................................................................... 13
6.1.2
UART Mode ............................................................................................................................ 13
6.1.3
Disabled Mode ........................................................................................................................ 14
6.2
MSP430 MCU ......................................................................................................................... 15
6.3
POWER SOURCES ..................................................................................................................... 15
6.3.1
Battery Power ......................................................................................................................... 16
6.3.2
USB Power ............................................................................................................................. 16
6.3.3
External Power Supply ........................................................................................................... 17
6.3.4
MSP-FET Power ..................................................................................................................... 18
6.4
LCD ......................................................................................................................................... 18
6.5
ACCELEROMETER ..................................................................................................................... 18
6.6
AMBIENT LIGHT SENSOR ........................................................................................................... 18
6.7
SERIAL FLASH........................................................................................................................... 18
6.8
BUTTONS.................................................................................................................................. 19
6.9
LEDS ....................................................................................................................................... 19
6.9.1
General Purpose LEDs ........................................................................................................... 19
6.9.2
USB LED ................................................................................................................................ 19
6.10
EM CONNECTORS..................................................................................................................... 20
6.11
BREAKOUT HEADERS AND JUMPERS .......................................................................................... 23
6.11.1 EM I/O breakout headers ....................................................................................................... 23
6.11.2 MSP430 I/O breakout ............................................................................................................. 23
6.12
CURRENT MEASUREMENT JUMPERS .......................................................................................... 26
7
CONNECTING AN EXTERNAL MCU TO SMARTRF TRXEB ................................................. 28
7.1
DISABLE MCUS ONBOARD SMARTRF TRXEB ............................................................................. 28
7.2
SELECT POWER SOURCE ........................................................................................................... 28
7.2.1
Power external MCU from SmartRF TrxEB ............................................................................ 28
7.2.2
Power SmartRF TrxEB from external power source .............................................................. 28
7.3
CONNECT SIGNALS .................................................................................................................... 29
7.3.1
Common signals ..................................................................................................................... 29
7.3.2
Transceiver GPIO signals ....................................................................................................... 29
8
SMARTRF TRXEB REV. 1.3.0 .................................................................................................. 30
8.1
BOARD OVERVIEW .................................................................................................................... 30
8.2
SOFTWARE CONSIDERATIONS.................................................................................................... 30
8.2.1
Virtual COM port over USB .................................................................................................... 30
8.2.2
Accelerometer......................................................................................................................... 30
8.3
USB MCU PIN-OUT .................................................................................................................. 31
8.4
MSP430 MCU PIN-OUT ............................................................................................................ 31
9
SMARTRF TRXEB REV. 1.5.0 .................................................................................................. 32
9.1
BOARD OVERVIEW .................................................................................................................... 32
9.2
CHANGES FROM REV. 1.3.0 ....................................................................................................... 32
Page 2/44
�SWRU294A
9.2.1
RC filter on USB MCU reset line ............................................................................................ 32
9.2.2
Accelerometer......................................................................................................................... 32
9.2.3
Silk print .................................................................................................................................. 33
9.3
USB MCU PIN-OUT .................................................................................................................. 33
9.4
MSP430 MCU PIN-OUT ............................................................................................................ 33
10
SMARTRF TRXEB REV. 1.7.0 .................................................................................................. 34
10.1
BOARD OVERVIEW .................................................................................................................... 34
10.2
CHANGES FROM REV. 1.5.0 ....................................................................................................... 34
10.2.1 Switch added to enable combo EM support ........................................................................... 34
10.2.2 Connector type for external power sources ............................................................................ 35
10.2.3 Connector type for LCD .......................................................................................................... 35
10.2.4 Ground pad between P17 and P7 .......................................................................................... 35
10.2.5 Silk print .................................................................................................................................. 36
10.3
USB MCU PIN-OUT .................................................................................................................. 36
10.4
MSP430 MCU PIN-OUT ............................................................................................................ 36
11
UPDATING THE FIRMWARE ................................................................................................... 37
11.1
FORCED BOOT RECOVERY MODE .............................................................................................. 38
11.2
BOARD RESURRECTION............................................................................................................. 39
12
FREQUENTLY ASKED QUESTIONS ....................................................................................... 41
13
REFERENCES ........................................................................................................................... 43
14
DOCUMENT HISTORY.............................................................................................................. 44
Page 3/44
�SWRU294A
List of Figures
Figure 1 – Install virtual COM port USB driver using the Windows Hardware Wizard ........................... 8
Figure 2 – SmartRF TrxEB (rev. 1.5.0) with EM connected ................................................................... 9
Figure 3 – SmartRF TrxEB architecture ................................................................................................ 11
Figure 4 – Flow chart of the USB MCU bootloader and standard firmware ......................................... 12
Figure 5 – UART lines connected between the USB MCU and the onboard MSP430 MCU. .............. 14
Figure 6 – Main power selection header (P17) and power switch (P5) ................................................ 15
Figure 7 – P17 jumper settings to power TrxEB using batteries........................................................... 16
Figure 8 – P17 jumper settings to power TrxEB via the USB cable ..................................................... 16
Figure 9 – P17 jumper settings to power TrxEB using external power supply ..................................... 17
Figure 10 – Powering TrxEB rev. ≤1.5.0 via the external power supply connector (P201) .................. 17
Figure 11 – TrxEB rev. 1.7.0 external power supply header (P1) ......................................................... 17
Figure 12 – P17 jumper settings to power EB using a MSP-FET ......................................................... 18
Figure 13 – SmartRF TrxEB EM connectors RF1 and RF2 .................................................................. 20
Figure 14 – EM interface ....................................................................................................................... 20
Figure 15 – SmartRF TrxEB I/O breakout overview ............................................................................. 23
Figure 16 – I/O connector P25A-E PCB layout ..................................................................................... 23
Figure 17 – MSP430 I/O breakout on SmartRF TrxEB ......................................................................... 23
Figure 18 – Current measurement jumpers .......................................................................................... 26
Figure 19 – Current measurement setup .............................................................................................. 26
Figure 20 – Switch and jumper settings to disable both SmartRF TrxEB MCUs .................................. 28
Figure 21 – Power external MCU board by connecting it to IO_PWR and GND .................................. 28
Figure 22 – P7 with strapping to connect external MCU to SmartRF TrxEB ........................................ 29
Figure 23 – SmartRF TrxEB revision 1.3.0 overview ............................................................................ 30
Figure 24 – Accelerometer axes on SmartRF TrxEB rev. 1.3.0 ........................................................... 30
Figure 25 – SmartRF TrxEB revision 1.5.0 overview ............................................................................ 32
Figure 26 – Accelerometer axes on SmartRF TrxEB rev. ≥1.5.0 ......................................................... 32
Figure 27 – Correct silk print for MCLK and SMCLK test points ........................................................... 33
Figure 28 – SmartRF TrxEB revision 1.7.0 overview ............................................................................ 34
Figure 29 – Signal overview for switch TS3A44159 added for SmartRF TrxEB rev. 1.7.0 .................. 35
Figure 30 – Added ground pad on SmartRF TrxEB rev. 1.7.0.............................................................. 35
Figure 31 – Firmware upgrade steps in SmartRF Studio ..................................................................... 37
Figure 32 – Enter forced boot recovery mode ...................................................................................... 38
Figure 33 – Proper connection for board resurrection. ......................................................................... 39
List of Tables
Table 1 – Available features on the SmartRF TrxEB .............................................................................. 5
Table 2 – Supply voltage: Recommended operating conditions and absolute max. ratings ................ 10
Table 3 – Temperature: Recommended operating conditions and storage temperatures ................... 10
Table 4 – SmartRF TrxEB operating modes ......................................................................................... 13
Table 5 – Data rates supported by the USB MCU in UART Mode ....................................................... 13
Table 6 – USB LED state descriptions .................................................................................................. 19
Table 7 – EM connector RF1 pin-out .................................................................................................... 21
Table 8 – EM connector RF2 pin-out .................................................................................................... 22
Table 9 – MSP430 Port 1-5 pin-out ...................................................................................................... 24
Table 10 – MSP430 Port 6-10 pin-out .................................................................................................. 25
Table 11 – Component/Power segment overview ................................................................................ 27
Table 12 – Strapping overview to connect common signals to an external MCU ................................ 29
Table 13 – Strapping overview to strap CC1120 GPIO to an external MCU ........................................ 29
Table 14 – USB MCU pin-out on SmartRF TrxEB rev. 1.3.0 ................................................................ 31
Table 15 – MSP430 miscellaneous signal pin-out ................................................................................ 31
Table 16 – S1 control over TS3A44159 switch for SmartRF TrxEB rev. 1.7.0 ..................................... 35
Table 17 – USB MCU pin-out on SmartRF TrxEB rev. 1.7.0 ................................................................ 36
Page 4/44
�SWRU294A
1 Introduction
The SmartRF Transceiver Evaluation Board (SmartRF TrxEB or simply EB) is the motherboard in a
number of development kits for Low Power RF transceiver devices from Texas Instruments. The
board has a wide range of features, listed in Table 1 below.
Component
Description
MSP430 MCU
The Ultra-low Power MSP430 serves as a platform for software
development, testing and debugging.
Full-speed USB 2.0 interface Easy plug and play access to full transceiver control using
SmartRF™ Studio PC software. Integrated serial port over USB
enables communication between onboard MSP430 and PC.
64x128 pixels serial LCD
Big LCD display for demo use and user interface development.
LEDs
Four general purpose LEDs for demo use or debugging.
Serial Flash
External flash for extra storage, over-the-air upgrades and more.
Buttons
Five push-buttons for demo use and user interfacing.
Accelerometer
Three-axis highly configurable digital accelerometer for application
development and demo use.
Light Sensor
Ambient Light Sensor for application development and demo use.
Breakout pins
Easy access to GPIO pins for quick and easy debugging.
Table 1 – Available features on the SmartRF TrxEB
2 About this manual
This manual contains reference information about the SmartRF TrxEB.
Chapter 4 will give a quick introduction on how to get started with the SmartRF TrxEB. It describes
how to install SmartRF Studio and to get the required USB drivers for the evaluation board. Chapter 5
briefly explains how the EB can be used throughout a project’s development cycle. Chapter 6 gives
an overview of the various features and functionality provided by the board.
Chapter 8, 9 and 10 provide additional details about the different versions of SmartRF TrxEB, revision
1.3.0, 1.5.0 and 1.7.0, respectively. Chapter 11 gives details on how to update the EB firmware, while
a troubleshooting guide is found in chapter 12.
Appendices A, B and C contain the schematics for the different versions of SmartRF TrxEB.
The PC tools SmartRF Studio and SmartRF Flash Programmer have their own user manual.
See chapter 13 for references to relevant documents and web pages.
Page 5/44
�SWRU294A
3 Acronyms and Abbreviations
ACM
Abstract Control Model
ALS
Ambient Light Sensor
CEBAL
CC Evaluation Board Abstraction Layer
CDC
Communication Device Class
CTS
Clear to Send
CW
Continuous Wave
DK
Development Kit
DUT
Device Under Test
EB
Evaluation Board
EM
Evaluation Module
IC
Integrated Circuit
I/O
Input/Output
KB
Kibi Byte (1024 byte)
LCD
Liquid Crystal Display
LED
Light Emitting Diode
LPRF
Low Power RF
MCU
Micro Controller
MISO
Master In, Slave Out (SPI signal)
MOSI
Master Out, Slave In (SPI signal)
NA
Not Applicable / Not Available
NC
Not Connected
PER
Packet Error Rate
RF
Radio Frequency
RX
Receive
RTS
Request to Send
SoC
System on Chip
SPI
Serial Peripheral Interface
TI
Texas Instruments
TrxEB
Transceiver Evaluation Board
TX
Transmit
TRX
Transmit / Receive
UART
Universal Asynchronous Receive Transmit
USB
Universal Serial Bus
Page 6/44
�SWRU294A
4 Getting Started
Before connecting the SmartRF TrxEB to the PC via the USB connector, it is highly recommended to
install the USB drivers needed for proper communication between the TrxEB and applicable PC tools.
The drivers are bundled and installed together with SmartRF™ Studio.
4.1 SmartRF Studio
SmartRF Studio is a PC application developed for evaluation of the low power RF IC products from
Texas Instruments. The application is designed for use with SmartRF Evaluation Boards, such as
SmartRF TrxEB, and runs on Microsoft Windows operating systems.
SmartRF Studio gives the user full overview of and access to the devices’ registers for configuration
of the radio parameters and behavior. It also provides a control interface for performing operations
like sending and receiving packets and setting up a continuous wave signal. In addition, it offers a
flexible system for exporting radio register values to a user defined format for easy integration in
software.
The latest version of SmartRF Studio can be downloaded from the Texas Instruments website [1].
4.2 Installing SmartRF Studio and USB drivers
Before your PC can communicate with the SmartRF TrxEB over USB, you will need to install the USB
drivers for the EB. The latest SmartRF Studio installer [1] includes the required USB drivers both for
Windows x86 and Windows x64 platforms.
After you have downloaded SmartRF Studio from the web, extract the zip-file, run the installer and
follow the instructions. Select the complete installation to include the SmartRF Studio program, the
SmartRF Studio documentation and the USB drivers. There are two drivers needed for TrxEB: Cebal
and a virtual COM port driver.
4.2.1 Cebal USB driver
NOTE: The SmartRF TrxEB must be in “SmartRF Mode” in order to be recognized by the PC
as a Cebal device. The EB is in SmartRF Mode when hardware switches S1 and S2 are in
positions “SmartRF” and “Enable”, respectively. See section 6.1 for more information about
the SmartRF TrxEB operating modes.
SmartRF PC software such as SmartRF Studio uses a proprietary USB driver, Cebal, to communicate
with evaluation boards. Connect your SmartRF TrxEB to the computer with a USB cable, set the
mode switches to “SmartRF” and “Enable”, and turn it on. If you did a complete install of SmartRF
Studio, Windows will recognize the device automatically and the SmartRF TrxEB is ready for use!
For more information regarding the USB drivers, please consult the SmartRF Studio documentation,
the USB driver installation guide [2] or chapter 11.
Page 7/44
�SWRU294A
4.2.2 Virtual COM port USB driver
NOTE: The SmartRF TrxEB must be in “UART Mode” in order to be recognized as a virtual
COM port. The EB is in UART Mode when hardware switches S1 and S2 are in positions
“UART” and “Enable”, respectively. See section 6.1 for more information about the SmartRF
TrxEB operating modes.
If you are using SmartRF TrxEB in UART Mode (see section 6.1.2), a standard driver for a virtual
COM port over USB is used (USB CDC-ACM). If you did a complete install of SmartRF Studio,
Windows will recognize the device automatically. If prompted with the Windows Hardware Wizard,
select “Install the software automatically (recommended)” and click next to finish the installation. The
SmartRF TrxEB is now ready for use!
If the SmartRF TrxEB CDC-ACM driver is not found by the Hardware Wizard, make sure you have
installed the latest version of SmartRF Studio [1]. In the Windows Hardware Wizard, select “Install
from a list or specific location (Advanced)”. You will see below window.
Figure 1 – Install virtual COM port USB driver using the Windows Hardware Wizard
The driver for the Virtual COM Port (VCP) is typically located in the directory C:\Program Files\Texas
Instruments\SmartRF Tools\Drivers\vcp, where C:\Program Files\Texas Instruments\SmartRF Tools\
is the root installation directory for SmartRF Tools such as SmartRF Studio. The path may be different
if you have chosen a different installation directory for SmartRF Studio.
If the above fails, select “Don’t Search. I will choose the driver to install.” A new window will open,
asking for a location of where the drivers can be found. Locate the trxeb_cdc_uart.inf file and select
that driver for installation.
Page 8/44
�SWRU294A
5 Using the SmartRF Transceiver Evaluation Board
The SmartRF TrxEB is a flexible test and development platform that works together with RF
Evaluation Modules from Texas Instruments.
An Evaluation Module is a small RF module with RF chip, balun, matching filter, antenna, and I/O
connectors. The modules can be plugged into the SmartRF TrxEB which lets the PC take direct
control of the RF device on the EM over the USB interface.
Currently, SmartRF TrxEB supports:
-
CC1120EM
CC1121EM
CC1175EM
CC1101EM
CC1100EM
-
CC1100EEM
CC110LEM
CC113LEM
CC115LEM
CC2520EM
SmartRF TrxEB is included in e.g. the CC1120 development kit. Some of the above EMs comes in
variants combined with a RF front-end such as CC1190, CC2590, or CC2591. Such variants are
1
called combo EMs and are also supported by the SmartRF TrxEB .
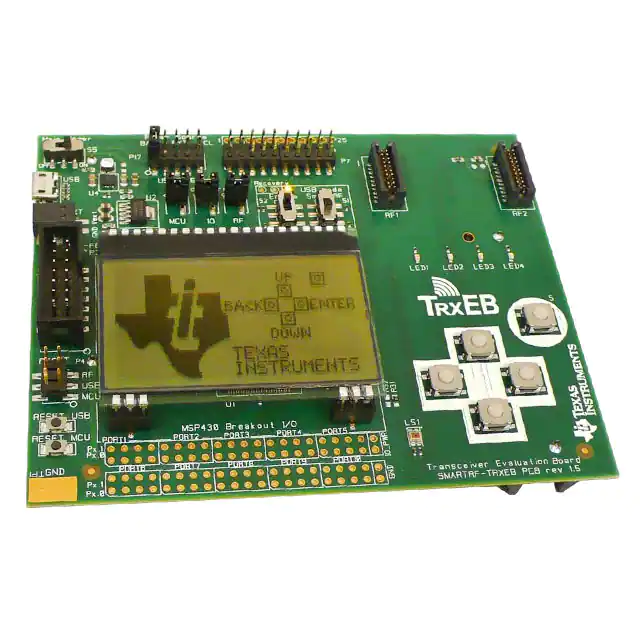
Figure 2 – SmartRF TrxEB (rev. 1.5.0) with EM connected
1
Some limitations exist for boards prior to version 1.7.0.
Page 9/44
�SWRU294A
The PC software that controls the SmartRF TrxEB + EM is SmartRF Studio. Studio can be used to
perform several RF tests and measurements, e.g. to set up a CW signal and send and receive
packets.
The EB+EM can be of great help during the whole development cycle for a new RF product.
-
Perform comparative studies. Compare results obtained with EB+EM with results from your
own system.
-
Perform basic functional tests of your own hardware by connecting the radio on your board to
SmartRF TrxEB. SmartRF Studio can be used to exercise the radio.
-
Verify your own software with known good RF hardware, by simply connecting your own
microcontroller to an EM via the EB. Test the send function by transmitting packets from your
SW and receive with another board using SmartRF Studio. Then transmit using SmartRF
Studio and receive with your own software.
-
Develop code for the MSP430 MCU.
-
Use the SmartRF TrxEB as a debugger interface to the low power RF 8051-based SoCs with
IAR Embedded Workbench.
5.1 Absolute maximum ratings
The minimum and maximum operating supply voltages and absolute maximum ratings for the active
components onboard the SmartRF TrxEB are summarized in Table 2. Table 3 lists the recommended
operating temperature and storage temperature ratings. Please refer to the respective component’s
datasheet for further details.
Component
Operating voltage
Min. [V]
Max. [V]
Absolute max. rating
Min. [V]
Max. [V]
USB MCU [3]
+3.0
+3.6
-0.3
+3.9
MSP430 MCU [6]
+1.8
+3.6
-0.3
+4.1
LCD [7]
+3.0
+3.3
-0.3
+3.6
Accelerometer [8]
+1.7
+3.6
-0.3
+3.6
Ambient light sensor [9]
+2.3
+5.5
NA
+6
Serial Flash [10]
+2.7
+3.6
-0.4
+4.0
Table 2 – Supply voltage: Recommended operating conditions and absolute max. ratings
Component
Operating temperature
Storage temperature
Min. [˚C]
Max. [˚C]
0
+85
-50
+150
MSP430 MCU [6]
-40
+85
-55
+105
LCD [7]
-20
+70
-30
+80
Accelerometer [8]
-40
+85
-40
+125
Ambient light sensor [9]
-40
+85
-40
+85
Serial Flash [10]
-40
+85
-65
+150
USB MCU [3]
Min. [˚C]
Max. [˚C]
Table 3 – Temperature: Recommended operating conditions and storage temperatures
Page 10/44
�SWRU294A
6 SmartRF Transceiver Evaluation Board Overview
SmartRF TrxEB acts as the motherboard in several development kits for low power RF ICs from
Texas Instruments. The board has several user interfaces and connections to external interfaces,
allowing fast prototyping and testing of both software and hardware.
This chapter will give an overview of the general architecture of the board and describe the available
I/O. The following sub-sections will explain the I/O in more detail. Pin connections between the
evaluation board I/O and EM can be found in section 6.10.
LEDs
JTAG
debug
Light
Sensor
Buttons
Serial
Flash
LCD
Accelerometer
SPI (USCIB2)
SPI (USCIA2)
MSP430F5438A
controller
UART (USCIA0)
SPI (USCIB1)
SPI (USCIB0)
EM
GPIO
UART
(USCIA1)
Micro USB
connector
GPIO (1.7.0+ only)
USB
Controller
(CC2511)
USB
LED
Figure 3 – SmartRF TrxEB architecture
NOTE: Signal names used in this user’s guide and in the SmartRF TrxEB schematics, are
named “as seen” from the onboard MSP430 MCU. E.g. signal name “P1_3” refers to the
signal connected to MSP430 port 1, pin 3.
Page 11/44
�SWRU294A
6.1 USB MCU
The USB MCU is the CC2511F32 from Texas Instruments. Please see the CC2511 product page [3]
on the TI web for detailed information about this controller. The recommended operating condition for
the CC2511 is a supply voltage between 3.0 V and 3.6 V. The min (max) operating temperature is 0
(+85) ˚C.
The USB controller is programmed with a bootloader and the standard SmartRF TrxEB firmware
when it is shipped from the factory. A flow chart over the USB MCU bootloader and standard firmware
is shown in Figure 4.
Power-on-Reset
Hold MSP430 &
EM in reset
Forced recovery or
no/invalid application
Yes
Release MSP430
& EM reset
No
Enable Cebal
USB interface
Launch application
Recovery Mode
USB MCU Bootloader
USB MCU Standard Application
SmartRF
S1/S2 change
Determine operating
mode (S1/S2)
Disabled
UART
Release EM
reset
Release MSP430
& EM reset
Release MSP430
& EM reset
Enable Cebal
USB interface
Enable CDC-ACM
USB interface
Enter low-power
mode
SmartRF Mode
UART Mode
Disabled Mode
Figure 4 – Flow chart of the USB MCU bootloader and standard firmware
When the bootloader starts running, it will check for a valid application in the CC2511 flash memory. If
detection is successful, the application is started and the board can be operated normally. If no
application is detected (e.g. blank flash or firmware upgrade failed) the USB LED (D6) will start
blinking rapidly – indicating failure. See section 6.9.2 for more details on USB LED states.
The USB MCU bootloader will allow programming/upgrading of the USB MCU firmware over the USB
interface. No additional hardware or programmers are needed. Both SmartRF Studio and SmartRF
Flash Programmer [4] can be used for this purpose. Please refer to chapter 11 for details.
The standard firmware application has three operating modes, controlled by hardware switches S1
and S2. The three modes are named “SmartRF Mode”, “UART Mode” and “Disabled Mode”. Table 4
shows which S1 and S2 positions that give the different operation modes. The following sections will
discuss the different operating modes in more detail.
Page 12/44
�SWRU294A
S2
Enable
Enable
Disable
S1
Operating Mode
SmartRF
UART
x
Key features
- Cebal USB interface
- MSP430 disabled
- Control RF-IC using
SmartRF Mode
SmartRF PC software
UART Mode
Disabled Mode
- CDC-ACM USB interface
- MSP430 enabled
- UART bridge between PC
and MSP430
- Control RF-IC using
MSP430 or external MCU
- USB interface disabled
- MSP430 enabled
- Control RF-IC using
MSP430 or external MCU
Table 4 – SmartRF TrxEB operating modes
6.1.1 SmartRF Mode
SmartRF Mode is the standard operating mode and is obtained by setting hardware switches S1 and
S2 on the EB to “SmartRF” and “Enable”, respectively (see Table 4).
In SmartRF mode the EB is recognized over USB as a Cebal device, enabling PC software like
SmartRF Studio to configure and control the RF-IC connected to the EB’s EM connectors.
The onboard MSP430 microcontroller is in this operating mode held in reset by the USB MCU.
6.1.2 UART Mode
UART Mode is obtained by setting hardware switches S1 and S2 on the EB to “UART” and “Enable”,
respectively (see Table 4).
In UART mode, the EB is recognized over USB as a virtual serial port (CDC-ACM). The USB MCU
works as a UART bridge between the onboard MSP430 and the PC. The hardware connection
between the USB MCU and the MSP430 is shown in Figure 5. The supported data rates are listed in
Table 5.
It is not possible to use SmartRF Studio or other PC software to communicate with a connected RF-IC
when operating in UART Mode. To communicate with a connected RF-IC, the onboard MSP430 or an
external MCU must be programmed with custom firmware. Please refer to the MSP430 User’s Guide
[5] for more information about the MSP430 MCU.
Data rate [baud]
9 600
38 400
56 700
115 200
Table 5 – Data rates supported by the USB MCU in UART Mode
Page 13/44
�SWRU294A
CTS
USB_UART_RTS
RTS
RTS
USB_UART_CTS
CTS
RXD
USB_UART_TXD
TXD
TXD
USB_UART_RXD
RXD
CC2511
MSP430 I/O
breakout
P4.4
P2.7
P5.6
P5.7
MSP430
Figure 5 – UART lines connected between the USB MCU and the onboard MSP430 MCU.
CTS and RTS lines are dotted to indicate that the USB MCU standard firmware only
implements a two-line UART interface to the MSP430 MCU.
NOTE: Figure 5 shows the four hardware connected UART lines between the USB MCU and
the MSP430 MCU. The MSP430 does not support hardware flow control (RTS and CTS
lines). Such support must be manually implemented in the MSP430 software. To ease
MSP430 application development, the standard USB MCU firmware uses a two-line UART
interface to the MSP430, i.e. hardware flow control is not implemented.
6.1.3 Disabled Mode
Disabled Mode is obtained by setting hardware switch S2 on the EB to “Disable” position (see Table
4). The position of S1 is disregarded by the USB MCU when S2 is in the “Disable” position.
In Disabled Mode, the USB MCU is in power-down mode and no USB communication is possible
between a PC and the EB. It is however still possible to power the EB via the USB cable, see section
6.3.2.
Page 14/44
�SWRU294A
6.2 MSP430 MCU
The SmartRF TrxEB is equipped with an MSP430F5438A micro controller from Texas Instruments.
Please see the MSP430F5438A product page [6] on the TI website for detailed information about this
controller.
All of the EB’s user interface peripherals are available to the MSP430 (Figure 3 on page 11).
Excluding the EM, the list of available peripherals consists of
-
LCD
5x Buttons
4x LEDs
Ambient Light Sensor
Accelerometer
SPI Flash.
The recommended operating condition for the MSP430 is a supply voltage (VCC) between 1.8 V and
3.6 V. The min (max) operating temperature is -40 (+85) ˚C.
NOTE: The onboard MSP430 MCU is held in reset by the USB MCU in SmartRF Mode. In
order to use the MSP430, make sure the USB MCU is set to Disabled Mode or UART Mode.
See section 6.1 for details.
6.3 Power Sources
There are four possible solutions for applying power to the SmartRF TrxEB; batteries, USB bus,
external power supply and MSP-FET. The power source can be selected using the power source
selection jumpers on header P17 (Figure 6). The main power supply switch (S5) turns off all power
sources.
Figure 6 – Main power selection header (P17) and power switch (P5)
WARNING! Do not use multiple power sources to power the SmartRF TrxEB at the same
time. Doing so may lead to excessive currents, causing onboard components to break.
WARNING! When using the SmartRF TrxEB with a MSP430 debugger (e.g. MSPFET430UIF), while powering the EB with a different power source (batteries, USB or external
power supply), a jumper should short circuit pin 9-10 of header P17 (“LCL”). This will prevent
the MSP-FET from supplying power to the EB.
Page 15/44
�SWRU294A
6.3.1 Battery Power
The SmartRF TrxEB includes a battery holder for two 1.5 V AA batteries on the reverse side of the
PCB. Normal AA batteries can be used and the onboard regulator supplies 3.3 V to the board. The
power source selection jumpers should short circuit pin 1-2 (“BATT”) and 9-10 (“LCL”) of header P17,
see Figure 7.
Figure 7 – P17 jumper settings to power TrxEB using batteries
The maximum current consumption is limited by the regulator to 800 mA.
6.3.2 USB Power
When the SmartRF TrxEB is connected to a PC via a USB cable, it can draw power from the USB
bus. The onboard voltage regulator supplies approximately 3.3 V to the board. The power source
selection jumpers should short circuit pin 3-4 (“USB”) and 9-10 (“LCL”) of header P17 (Figure 8).
Figure 8 – P17 jumper settings to power TrxEB via the USB cable
2
The maximum current consumption is limited by the regulator to 1500 mA .
2
Note that most USB power sources are limited to 500 mA.
Page 16/44
�SWRU294A
6.3.3 External Power Supply
The SmartRF TrxEB has a connector for powering the board using an external power supply. The
power source selection jumpers should short circuit pin 5-6 (“EXT”) and 9-10 (“LCL”) of header P16 as
shown in Figure 9.
Figure 9 – P17 jumper settings to power TrxEB using external power supply
WARNING! When using an external power source, all onboard voltage regulators are
bypassed. There is a risk of damaging the onboard components if the applied voltage on the
external power connector/header is lower than -0.3 V or higher than 3.6 V (combined
absolute maximum ratings for onboard components. See section 5.1 for further information.
6.3.3.1 SmartRF TrxEB revision ≤1.5.0
The external supply’s ground should be connected to pin 2 of P201. Apply a voltage in the range from
3.0 V to 3.3 V to pin 1 (see Figure 10). Pin 1 and pin 2 of P201 are marked “Vext” and “GND”,
respectively, on SmartRF TrxEB revision 1.5.0.
Pin 1: Vext
Pin 2: GND
Figure 10 – Powering TrxEB rev. ≤1.5.0 via the external power supply connector (P201)
6.3.3.2 SmartRF TrxEB revision 1.7.0
The external supply’s ground should be connected to the TrxEB ground, e.g. to the ground pad in the
bottom left corner of the EB. Connect the positive supply connector to either of the two pins on the
external power header P1 (Figure 11). The applied voltage must be in the range from 3.0 V to 3.3 V.
Figure 11 – TrxEB rev. 1.7.0 external power supply header (P1)
Page 17/44
�SWRU294A
6.3.4 MSP-FET Power
The SmartRF TrxEB can be powered via an MSP430 debugger such as MSP-FET430UIF. The power
source selection jumpers should in that case short circuit pin 7-8 of header P17 (Figure 12). Note that
the MSP-FET will not power the EB if pin 9-10 of header P17 (“LCL”) is short circuited.
Figure 12 – P17 jumper settings to power EB using a MSP-FET
6.4 LCD
The SmartRF TrxEB comes with a 128x64 pixels display from Electronic Assembly (DOGM128E-6)
[7]. The LCD display is available to the onboard MSP430 via an SPI interface, enabling software
development of user interfaces and demo use. The LCD display shares SPI interface with the serial
flash device (section 6.7).
The recommended operating condition for the LCD display is a supply voltage between 3.0 V and 3.3
V. The min (max) operating temperature is -20 (+70) ˚C.
6.5 Accelerometer
The SmartRF TrxEB is equipped with a digital accelerometer from VTI Technologies (CMA3000-D01)
[8]. The accelerometer is available to the onboard MSP430 MCU via an SPI interface and has a
dedicated interrupt line to the MCU. The onboard accelerometer is suitable for application
development, prototyping and demo use. See sections 8.2.2 and 9.2.2 for details on accelerometer
axis orientation for EB revision 1.3.0 and ≥1.5.0, respectively.
The recommended operating condition for the accelerometer is a supply voltage between 1.7 V and
3.6 V. The min (max) operating temperature is -40 (+85) ˚C.
6.6 Ambient Light Sensor
The SmartRF TrxEB has an analog SFH 5711 ambient light sensor from Osram [9] that is available to
the onboard MSP430, enabling quick application development for demo use and prototyping. The
light sensor is placed outside the bottom right corner of the LCD display.
The recommended operating condition for the ambient light sensor is a supply voltage between 2.3 V
and 5.5 V. The min (max) operating temperature is -40 (+85) ˚C.
6.7 Serial Flash
SmartRF TrxEB has a M25PE20 flash device – a paged 256 KB serial flash memory from Micron [10].
The device gives the MSP430 access to extra flash, enabling over-the-air upgrades and more. The
serial device shares SPI bus with the LCD display (section 6.4).
The recommended operating condition for the serial flash device is a supply voltage between 2.7 V
and 3.6 V. The min (max) operating temperature is -40 (+85) ˚C.
Page 18/44
�SWRU294A
6.8 Buttons
There are 7 buttons on the SmartRF TrxEB. Status of BTN_LEFT, BTN_RIGHT, BTN_UP,
BTN_DOWN and BTN_SELECT can be read by the onboard MSP430. These buttons are intended
for user interfacing and development of demo applications.
The RESET MCU button resets the MSP430 MCU by pulling its reset line low (MCU_RESET_N). The
RESET USB button similarly resets the USB controller (pulling USB_RESET_N low). Note that the
standard firmware on the USB controller will reset the EM and MSP430 during startup, so pushing the
RESET USB button also resets the controller on the EM board and the MSP430.
6.9 LEDs
6.9.1 General Purpose LEDs
The four LEDs D3, D4, D5, D7 can be controlled from the onboard MSP430 and are suitable for demo
use and debugging. The LEDs are active low.
6.9.2 USB LED
LED D6 (USB LED) is controlled by the USB controller and is used to indicate the status of the EB.
The USB LED has several states, listed in Table 6.
USB LED state
Description
OFF
Power is turned off, the USB controller is in Disabled
Mode or the software on the USB controller is corrupt.
ON
SmartRF Mode: The standard firmware is running and
a RF-IC has been detected.
UART Mode: The standard firmware is running. The
USB LED is quickly toggled OFF/ON when UART traffic.
This is typically seen as slight variations in emitted
intensity.
BLINKING (100 ms ON – 900 ms OFF) SmartRF Mode: No RF-IC is detected.
BLINKING (1 Hz)
The USB MCU has entered the boot recovery mode.
See chapter 11 for further details.
BLINKING (10 Hz)
The bootloader on the USB MCU could not find a valid
application to boot. Basic USB services are available
and both SmartRF Studio and SmartRF Flash
Programmer can be used to program an application to
the USB controller’s flash. See chapter 11 for further
details.
Table 6 – USB LED state descriptions
Page 19/44
�SWRU294A
6.10 EM Connectors
The EM connectors (TFM-110-02-S-D-A from Samtec), shown in Figure 13, are used for connecting
an EM board to the SmartRF TrxEB. The connectors RF1 and RF2 are the main interface and are
designed to avoid incorrect mounting of the EM board.
Figure 13 – SmartRF TrxEB EM connectors RF1 and RF2
The signals from the EM are primarily connected to the MSP430 on the TrxEB. Some of the signals
are also connected to the USB controller in order to allow control of the RF device from the PC with
SmartRF Studio. The figure below (Figure 14) illustrates how the signals are connected to the
MSP430 and which serial peripheral modules on the MSP430 that can potentially be used for
communication with the EM.
The main serial interface to the EM (transceiver) is over SPI using USCIB0. To support some of the
network processors and other EMs with alternative pin-out, some of the signals from the EM are
connected to both USCIB1 (for SPI) and USCIA0 (for UART). If the serial peripheral modules are not
needed, the same pins on the MSP430 can be used as general purpose IOs.
Also note that most of the general purpose control signals from the EM (i.e. the signals not used for
serial communication) are connected to interrupt capable pins on the MSP430 (port 1 and 2).
UART (USCIA0)
MSP430F5438A
controller
SPI (USCIB1)
EM
SPI (USCIB0)
GPIO
UART
(USCIA1)
switch*
GPIO
USB
Controller
(CC2511)
Figure 14 – EM interface
(*) Note that the switch is only present on rev 1.7.0 and newer of the TrxEB (see 10.2.1)
The pin-out of the EM connectors is given in Table 7 and Table 8 below. The signals from the EM
connectors are all accessible from either the EM I/O breakout headers (see section 6.11.1) and/or the
MSP430 I/O breakout (section 6.11.2).
Page 20/44
�SWRU294A
EM pin
Signal name
Description
Breakout
header
MSP430
RF1.1
GND
Ground
RF1.2
NC
Not connected
RF1.3
P1_4 / RF_SPI1_CS_N
GPIO signal to EM board / Alt. SPI P7.5
P1.4
RF1.4
P1_1
GPIO signal to EM board
P7.2
P1.1
RF1.5
P8_2
GPIO signal to EM board
P7.13
P8.2
RF1.6
P1_5
GPIO signal to EM board
P7.6
P1.5
RF1.7
RF_UART_TXD / RF_SPI1_MISO
2-line UART to EM board / Alt. SPI P7.9
RF1.8
(breakout)
GPIO signal
RF1.9
RF_UART_RXD / RF_SPI1_MOSI
2-line UART to EM board / Alt. SPI P7.7
P3.5 / P3.7
RF1.10
P1_7
GPIO signal to EM board
P7.8
P1.7
RF1.11
P8_3
GPIO signal to EM board
P7.15
P8.3
RF1.12
P1_3
GPIO signal to EM board
P7.4
P1.3
RF1.13
(breakout)
GPIO signal
P25A.2
RF1.14
RF_SPI0_CS_N
EM SPI Chip Select
P7.14
P3.0
RF1.15
P8_4
GPIO signal to EM board
P7.17
P8.4
RF1.16
RF_SPI0_SCLK
EM SPI Clock
P7.12
P3.3
RF1.17
P8_5
GPIO signal to EM board
P7.19
P8.5
RF1.18
RF_SPI0_MOSI
EM SPI MOSI
P7.16
P3.1
RF1.19
GND
Ground
P7.20
RF1.20
RF_SPI0_MISO
EM_SPI_MISO
P7.18
Table 7 – EM connector RF1 pin-out
Page 21/44
P3.4 / P5.4
P25A.1
P3.2
�SWRU294A
EM pin
Signal name
Description
RF2.1
NC
Not connected
RF2.2
GND
Ground
RF2.3
NC
Not connected
RF2.4
NC
Not connected
RF2.5
NC
Not connected
RF2.6
(breakout)
GPIO signal
RF2.7
RF_PWR
EM power
RF2.8
(breakout)
GPIO signal
RF2.9
RF_PWR
EM power
Breakout
header
MSP430
P25C.1
P25C.2
RF2.10 (breakout)
GPIO signal
P25D.1
RF2.11 (breakout)
GPIO signal
P25B.1
RF2.12 (breakout)
GPIO signal
P25D.2
RF2.13 (breakout)
GPIO signal
P25B.2
RF2.14 (breakout)
GPIO signal
P25E.1
RF2.15 RF_RESET_N
Signal used to reset EM board
P7.10
P8.0
RF2.16 NC
Not connected
RF2.17 P8_1
GPIO signal to EM board
P7.11
P8.1
RF2.18 P1_2 / RF_SPI1_SCLK
GPIO signal to EM board / Alt. SPI
P7.3
P1.2 / P5.5
RF2.19 P1_0
GPIO signal to EM board
P7.1
P1.0
RF2.20 GND (NC on rev < 1.7.0)
Ground
Table 8 – EM connector RF2 pin-out
Page 22/44
�SWRU294A
6.11 Breakout Headers and Jumpers
Header P7 and P25A-E give access to main EM connector pins, while P11, P14, P16 and P18-P24
give access to the MSP430 I/O (section 6.11.2). Some signals can be accessed from both the EM I/O
breakout headers and the MSP430 I/O breakout as indicated by Figure 15.
EM Connectors
RF1
RF2
MSP430
MCU
MSP430 I/O Breakout
EM I/O Breakout
P7, P25
Figure 15 – SmartRF TrxEB I/O breakout overview
6.11.1
EM I/O breakout headers
The EM I/O breakout headers on SmartRF TrxEB consist of header P7 and I/O connector P25. P25 is
made out of five 2-pin connectors (P25A-E). The layout of these connectors is shown in Figure 16.
Table 7 and Table 8 in section 6.10 shows how the EM I/O connector headers are mapped to EM
connector RF1 and RF2, respectively.
P25A
1 2
P25B P25C P25D P25E
1 2 1 2 1 2 1 2
Figure 16 – I/O connector P25A-E PCB layout
6.11.2
MSP430 I/O breakout
MSP430 ports 1-10 are on SmartRF TrxEB available through the MSP430 I/O breakout shown in
Figure 17. Table 9 lists I/O breakout for ports 1-5, while Table 10 covers ports 6-10. Both tables
indicate if the given MSP430 pin is connected to an EM connector pin. For additional info on the
MSP430 pin-out on SmartRF TrxEB, please refer to section 8.4.
Figure 17 – MSP430 I/O breakout on SmartRF TrxEB
Page 23/44
�SWRU294A
MSP430 Signal Name
Description
EM pin
P1.0
P1_0
Unused GPIO
RF2.19
P1.1
P1_1
GPIO signal to EM board
RF1.4
P1.2
P1_2 / RF_SPI1_SCLK
Alternative EM SPI Clock
RF2.18
P1.3
P1_3
GPIO signal to EM board
RF1.12
P1.4
P1_4 / RF_SPI1_CS_N
Alternative EM SPI Chip Select
RF1.3
P1.5
P1_5
GPIO signal to EM board
RF1.6
P1.6
P1_6
Unused GPIO
P1.7
P1_7
GPIO signal to EM board
P2.0
ACC_INT
Accelerometer interrupt line
P2.1
BTN_LEFT
Left button input line
P2.2
BTN_RIGHT
Right button input line
P2.3
BTN_SELECT
Select button input line
P2.4
BTN_UP
Up button input line
P2.5
BTN_DOWN
Down button input line
P2.6
P2_6
Unused GPIO
P2.7
USB_UART_CTS
CTS line to USB MCU
P3.0
RF_SPI0_CS_N
EM SPI Chip Select
RF1.14
P3.1
RF_SPI0_MOSI
EM SPI MOSI
RF1.18
P3.2
RF_SPI0_MISO
EM SPI MISO
RF1.20
P3.3
RF_SPI0_SCLK
EM SPI Clock
RF1.16
P3.4
RF_UART_TXD / RF_SPI1_MISO
2-line UART to EM board
RF1.7
P3.5
RF_UART_RXD / RF_SPI1_MOSI
2-line UART to EM board
RF1.9
P3.6
LCD_BL
LCD backlight module enable line 3
P3.7
RF_UART_RXD / RF_SPI1_MOSI
Alternative EM SPI MOSI
P4.0
LED_1
General purpose LED 1 line
P4.1
LED_2
General purpose LED 2 line
P4.2
LED_3
General purpose LED 3 line
P4.3
LED_4
General purpose LED 4 line
P4.4
USB_UART_RTS
RTS line to USB MCU
P4.5
P4_5
Unused GPIO
P4.6
P4_6
Unused GPIO
P4.7
P4_7
Unused GPIO
P5.0
P5_0
GPIO or VREF+
P5.1
P5_1
GPIO or VREF-
P5.2
P5_2 / XT2IN
Unused GPIO / External crystal oscillator line
P5.3
P5_3 / XT2OUT
Unused GPIO / External crystal oscillator line
P5.4
RF_UART_TXD / RF_SPI1_MISO
Alternative EM SPI MISO
RF1.7
P5.5
P1_2 / RF_SPI1_SCLK
Alternative EM SPI Clock
RF2.18
P5.6
USB_UART_TXD
TXD line to USB MCU
P5.7
USB_UART_RXD
RXD line to USB MCU
RF1.10
RF1.9
Table 9 – MSP430 Port 1-5 pin-out
3
LCD backlight module is not included. Additional components needed to use backlight module.
Page 24/44
�SWRU294A
MSP430 Signal Name
Description
P6.0
ACC_PWR
Accelerometer power, enable high
P6.1
ALS_PWR
Ambient light sensor power, enable high
P6.2
ALS_OUT
Ambient light sensor output line
P6.3
P6_3
Unused GPIO
P6.4
P6_4
Unused GPIO
P6.5
P6_5
Unused GPIO
P6.6
P6_6
Unused GPIO
P6.7
P6_7
Unused GPIO
P7.0
P7_0 / XIN
External crystal oscillator line
P7.1
P7_1 / XOUT
External crystal oscillator line
P7.2
FLASH_RESET_N
Serial flash reset line, active low
P7.3
LCD_RESET_N
LCD reset line, active low
P7.4
P7_4
Unused GPIO
P7.5
P7_5
Unused GPIO
P7.6
FLASH_PWR
Serial flash power, enable high
P7.7
LCD_PWR
LCD power, enable high
P8.0
RF_RESET_N
Signal used to reset EM board
RF2.15
P8.1
P8_1
GPIO signal to EM board
RF2.17
P8.2
P8_2
GPIO signal to EM board
RF1.5
P8.3
P8_3
GPIO signal to EM board
RF1.11
P8.4
P8_4
GPIO signal to EM board
RF1.15
P8.5
P8_5
GPIO signal to EM board
RF1.17
P8.6
FLASH_CS_N
SPI Chip Select for serial flash, active low
P8.7
ACC_CS_N
SPI Chip Select for accelerometer, active low
P9.0
IO_SPI1_SCLK
SPI Clock (interface used by accelerometer)
P9.1
IO_SPI0_MOSI
SPI MOSI (interface shared by LCD, serial flash)
P9.2
IO_SPI0_MISO
SPI MISO (interface shared by LCD, serial flash)
P9.3
IO_SPI0_SCLK
SPI SCLK (interface shared by LCD, serial flash)
P9.4
IO_SPI1_MOSI
SPI MOSI (interface used by accelerometer)
P9.5
IO_SPI1_MISO
SPI MISO (interface used by accelerometer)
P9.6
LCD_CS_N
SPI Chip Select for LCD, active low
P9.7
LCD_MODE
LCD mode select signal [7]
P10.0
P10_0
Unused GPIO
P10.1
P10_1
Unused GPIO
P10.2
P10_2
Unused GPIO
P10.3
P10_3
Unused GPIO
P10.4
P10_4
Unused GPIO
P10.5
P10_5
Unused GPIO
P10.6
P10_6
Unused GPIO
P10.7
P10_7
Unused GPIO
Table 10 – MSP430 Port 6-10 pin-out
Page 25/44
EM pin
�SWRU294A
6.12 Current Measurement Jumpers
SmartRF TrxEB has three current measurement jumpers, MCU_PWR, IO_PWR and RF_PWR, as
shown in Figure 18. By removing one of the jumpers, an ammeter can easily be connected to the
board and perform current consumption measurements on the different segments of the EB. Similarly,
a separate, regulated power supply for the EM can be connected. Table 11 shows an overview of
what onboard components are connected to which power segment.
Figure 18 – Current measurement jumpers
If the EM is powered by a different source than the rest of the board, the same voltage should be
used on the EM as on the EB. The digital signals between the EB and the EM are not isolated from
each other, and different voltage levels can cause excessive current consumption or erroneous
interaction between the EB and the EM.
NOTE: On SmartRF TrxEB revision 1.3.0, the “IO” and “RF” labels in the silk print are
switched around. For all revisions, IO and RF current should be measured on the jumpers
indicated by the silk print in Figure 18. See chapter 8 for details about EB revision 1.3.0.
Figure 19 – Current measurement setup
Page 26/44
�SWRU294A
Component
Default power
Alternative power
Evaluation Module
RF_PWR
NA
MSP430 MCU
MCU_PWR
NA
USB MCU
IO_PWR
NA
General Purpose LEDs IO_PWR
NA
USB LED
IO_PWR
NA
Accelerometer
MCU_PWR (MSP430 P6.0)
NA
Ambient Light Sensor
MCU_PWR (MSP430 P6.1)
NA
SPI Flash
MCU_PWR (MSP430 P7.6)
IO_PWR (swap R17/R18)
LCD
MCU_PWR (MSP430 P7.7)
IO_PWR (swap R29/R30)
Table 11 – Component/Power segment overview
Page 27/44
�SWRU294A
7 Connecting an external MCU to SmartRF TrxEB
You can easily connect an external MCU to a SmartRF TrxEB and use it to control the EM board
mounted on the TrxEB. This chapter gives a quick overview over the signals that must be connected
to enable your external MCU to control the EM.
7.1 Disable MCUs onboard SmartRF TrxEB
To avoid any signal conflicts between the MCUs onboard the SmartRF TrxEB (MSP430 and USB
MCU) and the external MCU, both onboard MCUs should be disabled.
Disable the USB MCU by setting mode selection switch S2 to “Disable” position (Figure 20a).
To hold the onboard MSP430 MCU in reset state, short circuit pins 1-2 on header P4 as shown in
Figure 20b. An alternative, more power efficient option is to program the onboard MSP430 with you
own, custom software which configures the MSP430 pins to minimize current consumption and makes
the MSP430 enter a low-power mode [5].
a) Disable USB MCU
b) Hold MSP430 in reset
Figure 20 – Switch and jumper settings to disable both SmartRF TrxEB MCUs
7.2 Select power source
When connecting an external MCU board to the SmartRF TrxEB, there are typically two options for
powering the boards, both consisting of sharing a power source. The first is to let the external MCU
board draw power from the SmartRF TrxEB; the second is to power the SmartRF TrxEB from an
external power source. It is in both cases important that the voltage levels on shared signals are the
same.
7.2.1 Power external MCU from SmartRF TrxEB
Power the external MCU board by connecting it to IO_PWR (P9) and GND (P6) on SmartRF TrxEB,
shown in Figure 21.
Figure 21 – Power external MCU board by connecting it to IO_PWR and GND
7.2.2 Power SmartRF TrxEB from external power source
Connect the power from the external power source to the external power source connector on
SmartRF TrxEB and set the power source selection jumpers accordingly. Please see section 6.3.3 for
a detailed description on how to power the SmartRF TrxEB from an external power source.
NOTE: When powering the SmartRF TrxEB from an external power source, the TrxEB main
power switch must be in on position for the EB to be powered up.
Page 28/44
�SWRU294A
7.3 Connect signals
7.3.1 Common signals
Table 12 shows the common signals needed to communicate with transceivers on a mounted EM
board. Figure 22 shows where the signals listed Table 12 and Table 13 can be found on the P7 EM
I/O breakout header on SmartRF TrxEB.
TrxEB Signal Name TrxEB breakout pin Description
RF_RESET_N
P7.10
Signal used to reset EM board
RF_SPI0_SCLK
P7.12
EM SPI interface clock signal
RF_SPI0_CS_N
P7.14
EM SPI interface chip select signal, active low
RF_SPI0_MOSI
P7.16
EM SPI interface MOSI signal
RF_SPI0_MISO
P7.18
EM SPI interface MISO signal
GND
P7.20
Common ground for EB and external MCU board
Table 12 – Strapping overview to connect common signals to an external MCU
7.3.2 Transceiver GPIO signals
The CC1120 GPIO pins available through the EM connectors on the SmartRF TrxEB are listed in
Table 13. Figure 22 shows where the signals listed Table 12 and Table 13 can be found on the P7
EM I/O breakout header on SmartRF TrxEB. On SmartRF TrxEB rev. 1.7.0, silk print indicates where
the most important EM I/O signals on header P7 are located.
NOTE: Transceiver EM boards from Texas Instruments share much of the same GPIO
routing to the EM connectors. However, the number of GPIO signals available depends on
the transceiver. Please refer to the schematics of your EM board for further details on the
available GPIO.
TrxEB Signal Name
TrxEB Breakout Pin Description
P1_7
P7.8
Transceiver GPIO0
RF_SPI0_MISO
P7.18
Transceiver GPIO1 (Shared with EM SPI MISO)
P1_3
P7.4
Transceiver GPIO2
P1_2 / RF_SPI1_SCLK P7.3
Transceiver GPIO3
Table 13 – Strapping overview to strap CC1120 GPIO to an external MCU
GPIO3
GND
SPI MISO
SPI MOSI
SPI CSn
SPI SCLK
GPIO2
GPIO0
RESET
Figure 22 – P7 with strapping to connect external MCU to SmartRF TrxEB
Page 29/44
�SWRU294A
8 SmartRF TrxEB rev. 1.3.0
8.1 Board Overview
Figure 23 – SmartRF TrxEB revision 1.3.0 overview
8.2 Software Considerations
8.2.1 Virtual COM port over USB
The onboard MSP430 MCU can communicate with a PC over a virtual serial port when the USB MCU
is in UART Mode (described in section 6.1.2). When developing MSP430 code to communicate via
the USB MCU, keep in mind that the standard USB MCU firmware only supports a two-line UART
interface (see section 6.1.2 for further details).
8.2.2 Accelerometer
The onboard MSP430 MCU has access to accelerometer A1. On SmartRF TrxEB revision 1.3.0, the
accelerometer axes are as shown in Figure 24.
X
Z
Y
Figure 24 – Accelerometer axes on SmartRF TrxEB rev. 1.3.0
Page 30/44
�SWRU294A
8.3 USB MCU pin-out
Table 14 shows how the USB MCU’s pins are connected to the different functionalities on EB revision
1.3.0.
CC2511 Signal name
Description
EM pin
P0.0
MCU_RESET_N
Signal used to reset MSP430 MCU
P0.1
RF_RESET_N
Signal used to reset EM board
RF2.15
P0.2
RF_SPI0_CS_N
EM SPI Chip Select
RF1.14
P0.3
RF_SPI0_SCLK
EM SPI Clock
RF1.16
P0.4
RF_SPI0_MOSI
EM SPI MOSI
RF1.18
P0.5
RF_SPI0_MISO
EM SPI MISO
RF1.20
P1.0
USB_PULLUP
Enable USB Interface pull-up resistor
P1.1
P1_3
CC Debug Clock
P1.2
USB_UART_RTS
MSP430 UART (CC2511 CTS)
P1.3
USB_UART_CTS
MSP430 UART (CC2511 RTS)
P1.4
USB_UART_TXD
MSP430 UART (CC2511 RXD)
P1.5
USB_UART_RXD
MSP430 UART (CC2511 TXD)
P1.6
USB_ENABLE
Switch S2 input
P1.7
P1_7
CC Debug Data
P2.0
RF_UART_RXD / RF_SPI1_MOSI GPIO signal to EM board
P2.1
USB_DBG_DD
CC2511 CC Debug Interface Data
P2.2
USB_DBG_DC
CC2511 CC Debug Interface Clock
P2.3
USB_MODE
Switch S1 input
P2.4
USB_LED
USB LED and Forced Recovery signal
RF1.12
RF1.10
RF1.9
Table 14 – USB MCU pin-out on SmartRF TrxEB rev. 1.3.0
8.4 MSP430 MCU pin-out
For details on the pin-out for MSP430 port 1-10, please refer to Table 9 and Table 10 in section
6.11.2. Table 15 below shows the MSP430 pin-out not listed in section 6.11.2.
MSP430 Signal Name
Description
P11.0
ACLK
MSP430 ACLK output to test point TP5
P11.1
MCLK
MSP430 MCLK output to test point TP6
P11.2
SMCLK
MSP430 SMCLK output to test point TP7
VCORE VCORE
MSP430 VCORE output to test point TP8
PJ.0
TDO
JTAG Test Data Out
PJ.1
TDI
JTAG Test Data In
PJ.2
TMS
JTAG Test Mode Select
PJ.3
TCK
JTAG Test Clock
Table 15 – MSP430 miscellaneous signal pin-out
Page 31/44
�SWRU294A
9 SmartRF TrxEB rev. 1.5.0
9.1 Board Overview
Figure 25 – SmartRF TrxEB revision 1.5.0 overview
9.2 Changes from rev. 1.3.0
9.2.1 RC filter on USB MCU reset line
The pull-up resistor R22 on the USB MCU’s reset line (USB_RESET_N) has been removed. It is
replaced by a RC filter (R22 and C50) to remove ripple during reset line state transitions. See the
schematics for EB revision 1.5.0 for more details.
9.2.2 Accelerometer
The onboard accelerometer (A1) has been rotated 180 degrees compared to EB revision 1.3.0. The
accelerometer axes are given in Figure 26. Silk print has been added on the EB backside indicating
the accelerometer axes.
Y
Z
X
Figure 26 – Accelerometer axes on SmartRF TrxEB rev. ≥1.5.0
Page 32/44
�SWRU294A
9.2.3 Silk print
Silk print text “IO” and “RF” near board current measurement jumpers P10 and P15 were on EB
revision 1.3.0 placed next to the wrong jumper. This has been corrected as seen in Figure 27.
Silk print text “MCLK” and “SMCLK” near test points TP6 and TP7 were on EB revision 1.3.0
swapped, and placed next to the wrong test point. This has been corrected as seen in Figure 27.
Figure 27 – Correct silk print for MCLK and SMCLK test points
Silk print has been added to the backside for EB revision 1.5.0. The silk print indicates the orientation
of the accelerometer axes (see section 9.2.1) and power source jumper configurations (see section
6.3).
9.3 USB MCU pin-out
Same as revision 1.3.0, see section 8.3.
9.4 MSP430 MCU pin-out
Same as revision 1.3.0, see section 8.4.
Page 33/44
�SWRU294A
10 SmartRF TrxEB rev. 1.7.0
10.1 Board Overview
EM IO
Breakout header
Power source
selection header
Main power
switch
EM connectors
USB connector
USB LED
External power
supply connector
Mode selection
switces
Jumpers for current
measurement
General purpose
LEDs
MSP430 debug
connector
Accelerometer
USB MCU
CC2511
SPI flash
256 kByte
CC2511 debug
connector
General purpose
buttons
Reset header
Ambient Light
Sensor
Reset buttons
MSP430F5438A
MSP430 IO
breakout
LCD
Figure 28 – SmartRF TrxEB revision 1.7.0 overview
10.2 Changes from rev. 1.5.0
10.2.1
Switch added to enable combo EM support
In order to support all combo EMs (e.g. CC1101-CC1190), a switch (TS3A44159) has been added in
EB revision 1.7.0. The switch is placed between the four UART lines between the USB MCU and the
MSP430 as shown in Figure 29. Hardware switch S1 controls the switch as given in Table 16.
With the USB MCU in UART Mode (see section 6.1.2), the switch connects COMx lines to NCx lines
resulting in the same behavior as for older revisions of SmartRF TrxEB. In SmartRF Mode (see
section 6.1.1), COMx lines are connected to NOx giving the USB MCU extra access to the EM
interface, enabling support of combo EMs in SmartRF Studio.
Page 34/44
�SWRU294A
(CTS) P1.2
CC2511_CTS
COM1
NC1
USB_UART_RTS
P4.4 (RTS)
(RTS) P1.3
CC2511_RTS
COM2
NC2
USB_UART_CTS
P2.7 (CTS)
(RXD) P1.4
CC2511_RX
COM3
NC3
USB_UART_TXD
P5.6 (TXD)
(TXD) P1.5
CC2511_TX
COM4
NC4
USB_UART_RXD
P5.7 (RXD)
Switch
TS3A44159
CC2511
SMARTRF
GND
MSP430
NO1
P1_2 / RF_SPI1_SCLK
RF2.18
NO2
P1_4 / RF_SPI1_CS_N
RF1.3
IN1-2
NO3
RF_UART_TXD / RF_SPI1_MISO
RF1.9
IN3-4
NO4
RF_UART_RXD / RF_SPI1_MOSI
RF1.7
IO_PWR
S1
MSP430 I/O
breakout
P18.5
P14.8
P19.7
P19.8
UART
EM I/O
breakout
P7.3
P7.5
P7.7
P7.9
EM Interface
Figure 29 – Signal overview for switch TS3A44159 added for SmartRF TrxEB rev. 1.7.0
S1 position Switch TS3A44159 connection
UART
COMx ↔ NCx
SMARTRF
COMx ↔ NOx
Table 16 – S1 control over TS3A44159 switch for SmartRF TrxEB rev. 1.7.0
10.2.2
Connector type for external power sources
On SmartRF TrxEB rev. 1.7.0, the external power source connector has been switched to a two-pin
header (P1). See section 6.3.3.2 for more details on how to power SmartRF TrxEB rev. 1.7.0 using an
external power supply.
10.2.3
Connector type for LCD
SmartRF TrxEB rev. 1.7.0 comes with a different LCD connector type than previous revisions to
ensure proper connection to the LCD.
WARNING! The LCD connector on SmartRF TrxEB rev. 1.7.0 is very tight. Be extremely
cautious when removing the LCD display to avoid the LCD display from breaking.
10.2.4
Ground pad between P17 and P7
A new ground pad has been added between the power source header (P17) and the EM I/O breakout
header (P7) to ease connection of probes with these headers. The new ground pad is shown in
Figure 30.
Figure 30 – Added ground pad on SmartRF TrxEB rev. 1.7.0.
Page 35/44
�SWRU294A
10.2.5
Silk print
There has been made several minor additions to the silk print on SmartRF TrxEB 1.7.0, e.g. EM I/O
breakout pins on header P7 are now marked (see Figure 30).
10.3 USB MCU pin-out
Table 17 shows how the USB MCU’s pins are connected to the different functionalities on EB revision
1.7.0. Changes from previous EB revision are in bold.
CC2511 Signal name
Description
P0.0
MCU_RESET_N Signal used to reset MSP430 MCU
P0.1
RF_RESET_N
Signal used to reset EM board
RF2.15
P0.2
RF_SPI0_CS_N
EM SPI Chip Select
RF1.14
P0.3
RF_SPI0_SCLK
EM SPI Clock
RF1.16
P0.4
RF_SPI0_MOSI
EM SPI MOSI (Master Out, Slave In)
RF1.18
P0.5
RF_SPI0_MISO
EM SPI MISO (Master in, slave out)
RF1.20
P1.0
USB_PULLUP
Enable USB Interface pull-up resistor
P1.1
P1_3
CC Debug Clock
P1.2
CC2511_CTS
MSP430 UART / GPIO connected to EM board RF2.18
P1.3
CC2511_RTS
MSP430 UART / GPIO connected to EM board RF1.3 4
P1.4
CC2511_RX
MSP430 UART / GPIO connected to EM board RF1.9 4
P1.5
CC2511_TX
MSP430 UART / GPIO connected to EM board RF1.7 4
P1.6
USB_ENABLE
Switch S2 input
P1.7
P1_7
CC Debug Data
RF1.10
P2.0
TP3
GPIO connected to test point TP3
NC
P2.1
USB_DBG_DD
CC2511 CC Debug Interface Data
P2.2
USB_DBG_DC
CC2511 CC Debug Interface Clock
P2.3
USB_MODE
Switch S1 input
P2.4
USB_LED
USB LED and Forced Recovery signal
Table 17 – USB MCU pin-out on SmartRF TrxEB rev. 1.7.0
10.4 MSP430 MCU pin-out
Same as revision 1.3.0, see section 8.4.
4
EM pin
USB MCU pin is GPIO connected to the EM board in SmartRF Mode (section 6.1.1).
Page 36/44
RF1.12
4
�SWRU294A
11 Updating the firmware
NOTE: This chapter only describes how to program the firmware on the USB controller on
the TrxEB. To program the MSP430, use the MSP-FET430UIF tool and connect it to the
FET430 connector on the EB. Programming can be done using IAR EW430, CCS or
SmartRF Flash Programmer.
Updating the EB firmware is done automatically by SmartRF Studio and SmartRF Flash Programmer
if an old or incompatible firmware version is found on the USB MCU. SmartRF Flash Programmer also
allows manual programming of the EB firmware. Please refer to the respective user’s guides for
detailed instructions. A simple step-by-step guide for updating the USB MCU firmware using SmartRF
Studio is provided below.
1.
2.
3.
4.
Turn off the evaluation board (EB).
Disconnect any connected evaluation module (EM).
Plug in the USB cable and turn the power switch on.
The SmartRF TrxEB device should appear in the SmartRF Studio main window as seen in
Figure 31a.
5. Double click the TrxEB device. SmartRF Studio will prompt if you wish to update the EB
firmware (Figure 31b).
6. Confirm that you wish to update the EB firmware and wait for the upgrade process to
complete (Figure 31c). This may take several seconds.
7. The EB will re-appear as a connected device in the SmartRF Studio window when the update
is completed.
a)
b)
c)
Figure 31 – Firmware upgrade steps in SmartRF Studio
Page 37/44
�SWRU294A
11.1 Forced Boot Recovery Mode
If the firmware update fails and the evaluation board appears to be dead, there is a way to force the
board to only run the bootloader and stop all further execution. No attempts will be made to start the
EB firmware.
1. Turn the EB power off.
2. Rev. 1.3.0: Ground the USB LED test point shown in Figure 32a.
Rev. ≥1.5.0: Ground the USB LED test point with the GND test point in Figure 32b.
3. While doing as explained in the second step, turn the EB power on.
When the board is powered up, the bootloader will not attempt to start the firmware and it will remain
in control of the board. LED D6 (USB LED) will be blinking with a 1 second interval, indicating that the
bootloader is running. You can use the USB LED state as an indicator to whether you have a working
bootloader or not.
When the bootloader is running, the only functionality that is offered from SmartRF Studio and
SmartRF Flash Programmer is to load a new version of the standard firmware.
b) Revision ≥1.5.0
a) Revision 1.3.0
Figure 32 – Enter forced boot recovery mode
Page 38/44
�SWRU294A
11.2 Board Resurrection
If the forced boot recovery method above also fails, the board might be faulty or the flash on the
CC2511 device has been inadvertently deleted. If the latter has happened, you can try to reprogram
the boot loader on the CC2511. This will require that you have a CC Debugger [11].
First, you will have to remove the LCD from the TrxEB to get access to the debug connector for the
CC2511 (P200). The LCD might be difficult to remove and can easily break if you use excessive
force. Once the LCD is removed, connect the CC Debugger to P200 with the small flat-cable and
adapter board included with the debugger.
Next, apply power to the TrxEB board from a suitable power source (e.g. USB). Then connect the CC
Debugger to the PC via a USB cable and press the reset button on the debugger. The GREEN LED
on the debugger should now be turned on to indicate that it has detected the CC2511 device on the
TrxEB. If the RED LED is turned on, verify that the voltage level on the TrxEB is 3.3V and that the
debugger is connected correctly (note the orientation of pin 1 on the debugger cable).
Figure 33 – Proper connection for board resurrection.
If the RED LED on the debugger remains on, the TrxEB is most likely broken. Please contact your TI
representative for a possible replacement.
If the GREEN LED on the debugger is on, you can proceed with programming the boot loader from
SmartRF Flash Programmer.
In SmartRF Flash Programmer, first select “Program Evaluation Board” and then go to the “EB
bootloader” tab. The screenshot below shows the settings you will need to use.
Page 39/44
�SWRU294A
In the Device drop down list, select SmartRF05EB.
The interface speed can be set to Fast.
The flash image to program is C:\Program Files (x86)\Texas Instruments\SmartRF
Tools\Firmware\TrxEB\usb_bootloader_trxeb.hex
In the list of connected devices, you should see the CC Debugger connected to the CC2511.
Select “Erase, program and verify” from the list of actions.
Give the board a unique ID number.
When all of the above is set, press the “Perform actions” button.
If everything went well, the yellow USB Led on the TrxEB should start blinking rapidly. This means
that the boot loader is running and that it is waiting for the firmware to be programmed. Follow the
steps in the first section of this chapter to program the firmware.
Page 40/44
�SWRU294A
12 Frequently Asked Questions
Q1
A1
I have a SmartRF TrxEB that says revision 1.1 on the PCB, but rev. 1.1 is not mentioned
in the User’s Guide. Why?
Your SmartRF TrxEB is what this document calls revision 1.3.0. This user’s guide refers to
the assembly revision of the EB. On SmartRF TrxEB (assembly) revision 1.3.0, the PCB
revision is 1.1. For EB revisions 1.5.0 and 1.7.0, PCB revisions are synchronized with the
assembly revision, being 1.5 and 1.7, respectively.
Q2
A2
How do I check the firmware revision on the evaluation board?
You can use both SmartRF Studio and SmartRF Flash Programmer to check the firmware
revision. Connect the EB to a PC via USB and launch e.g. the SmartRF Flash Programmer.
Select the “EB application (USB)” tab. The SmartRF board should be listed with relevant
information about the firmware running on the board. In the below example, the EB firmware
revision is 0009.
Q3
A3
Installation of USB drivers for the evaluation board fails. Help!
Please refer to design note DN304 [2] on the TI web for help regarding installation of the
Cxxxx Development Tools USB driver (Cebal).
Q4
A4
Nothing happens when I power up the evaluation board. Why?
Make sure the power selection jumpers on header P17 are set according to your power
source (see section 6.3). Check that the Mode Selection switches (section 6.1) are not set to
disable the USB MCU. Also, make sure the board current jumpers (P10, P13 and P15) are all
short circuited.
Q5
A5
When powering up the evaluation board, LED D6 starts blinking. Why?
LED D6 (aka. USB LED) indicates the state of the TrxEB. If the observed behavior is short
blinks with long pauses (0.1 s ON, 0.9 s OFF), the EB firmware does not detect any
connected chip. If an EM is connected, the firmware does not support the connected EM. Try
updating the EB firmware using SmartRF Studio or SmartRF Flash Programmer (see chapter
11).
If the blink frequency is about 1 Hz (0.5 s ON, 0.5 s OFF), the USB MCU bootloader has
entered a forced boot recovery mode (set during programming of the device). Power off the
system and turn it back on to start the application.
If the blinking is more rapid (10 times per second) the bootloader could not find a valid
application in flash. Use SmartRF Studio or SmartRF Flash Programmer to program a new
firmware on the board.
See section 6.9.2 for more details on LED D6 states.
Q6
A6
I already have a SmartRF TrxEB revision 1.3.0/1.5.0 and I have written a lot of software
for the MSP430 MCU on that board. Now, I get revision 1.7.0 in new development kits.
Do I need to rewrite all of my software?
No, you do not need to rewrite your software. The hardware connection between the onboard
MSP430 and the EM remains the same in revision 1.7.0. The difference is that in revision
1.7.0, an extra switch has been added between the USB MCU and the MSP430/EM. This
Page 41/44
�SWRU294A
switch gives the USB MCU access to extra EM I/O in SmartRF Mode, allowing support for
combo EMs (e.g. CC1101-CC1190). See section 10.2 for further details on hardware changes
in EB revision 1.7.0 and chapter.
Q7
A7
I have a CC1101-CC1190EM combo board. Will it work with SmartRF TrxEB and
SmartRF Studio?
Yes and no. Yes, you can connect the CC1101-CC1190EM to the TrxEB and control the
combo board from the MSP430. However, this assembly is not yet fully supported by
SmartRF Studio. Studio does support the CC1101-CC1190 combo, but the automatic control
of the signals to the CC1190 device is currently only supported on SmartRF04EB.
You can of course still use TrxEB + CC1101-CC1190EM in SmartRF Studio, as all the
relevant RF registers will be correct, but you need to “help” the system to set the CC1190
device in the right mode. Use the jumpers on the EM to control the LNA/PA/HGM signals. For
all RX tests, the LNA signal should be high (PA low) and for all TX tests, the PA signal should
be high (LNA low).
Page 42/44
�SWRU294A
13 References
[1] SmartRF Studio Product Page
www.ti.com/smartrfstudio
[2] DN304 – CCxxxx Development Tools USB Driver Installation Guide
www.ti.com/lit/swra366
[3] CC2511F32 Product Page
www.ti.com/product/cc2511f32
[4] SmartRF Flash Programmer Product Page
www.ti.com/tool/flash-programmer
[5] MSP430x5xx/MSP430x6xx Family User’s Guide
www.ti.com/lit/slau208
[6] MSP430F5438A Product Page
www.ti.com/product/msp430f5438a
[7] Electronic Assembly DOGM128-6 Datasheet
http://www.lcd-module.com/eng/pdf/grafik/dogm128e.pdf
[8] VTI CMA3000-D01
http://www.vti.fi/en/products/accelerometers/consumer_electronics/cma3000_series/
[9] Osram SFH 5711
http://www.osram-os.com/
[10] Micron M25PE Datasheet
http://www.micron.com/~/media/Documents/Products/Data%20Sheet/NOR%20Flash/5965M2
5PE20_10.ashx
[11] CC Debugger
www.ti.com/tool/cc-debugger
Page 43/44
�SWRU294A
14 Document History
Revision
Date
Description/Changes
SWRU294A
2012-02-10
Updated with information about revision 1.7.0.
Corrected information about use of CC1101-CC1190EM on TrxEB.
Added information about board resurrection.
Added some more information about the EM connector/interface.
SWRU294
2011-06-30
Initial release.
Page 44/44
�SWRU294A
Appendix A
Schematics
SmartRF TrxEB 1.3.0
��������SWRU294A
Appendix B
Schematics
SmartRF TrxEB 1.5.0
��������SWRU294A
Appendix C
Schematics
SmartRF TrxEB 1.7.0
��������IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements,
and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should
obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are
sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard
warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where
mandated by government requirements, testing of all parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and
applications using TI components. To minimize the risks associated with customer products and applications, customers should provide
adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right,
or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information
published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a
warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual
property of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied
by all associated warranties, conditions, limitations, and notices. Reproduction of this information with alteration is an unfair and deceptive
business practice. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional
restrictions.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all
express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice. TI is not
responsible or liable for any such statements.
TI products are not authorized for use in safety-critical applications (such as life support) where a failure of the TI product would reasonably
be expected to cause severe personal injury or death, unless officers of the parties have executed an agreement specifically governing
such use. Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications, and
acknowledge and agree that they are solely responsible for all legal, regulatory and safety-related requirements concerning their products
and any use of TI products in such safety-critical applications, notwithstanding any applications-related information or support that may be
provided by TI. Further, Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in
such safety-critical applications.
TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are
specifically designated by TI as military-grade or "enhanced plastic." Only products designated by TI as military-grade meet military
specifications. Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at
the Buyer's risk, and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use.
TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are
designated by TI as compliant with ISO/TS 16949 requirements. Buyers acknowledge and agree that, if they use any non-designated
products in automotive applications, TI will not be responsible for any failure to meet such requirements.
Following are URLs where you can obtain information on other Texas Instruments products and application solutions:
Products
Applications
Audio
www.ti.com/audio
Automotive and Transportation www.ti.com/automotive
Amplifiers
amplifier.ti.com
Communications and Telecom www.ti.com/communications
Data Converters
dataconverter.ti.com
Computers and Peripherals
www.ti.com/computers
DLP® Products
www.dlp.com
Consumer Electronics
www.ti.com/consumer-apps
DSP
dsp.ti.com
Energy and Lighting
www.ti.com/energy
Clocks and Timers
www.ti.com/clocks
Industrial
www.ti.com/industrial
Interface
interface.ti.com
Medical
www.ti.com/medical
Logic
logic.ti.com
Security
www.ti.com/security
Power Mgmt
power.ti.com
Space, Avionics and Defense
www.ti.com/space-avionics-defense
Microcontrollers
microcontroller.ti.com
Video and Imaging
www.ti.com/video
RFID
www.ti-rfid.com
OMAP Mobile Processors
www.ti.com/omap
Wireless Connectivity
www.ti.com/wirelessconnectivity
TI E2E Community Home Page
e2e.ti.com
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2012, Texas Instruments Incorporated
�