内置 EEPROM 和 UART 的增强 A/D 型单片机
HT66F3197
版本 : V1.10
日期 : 2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
目 录
特性 ..................................................................................................................................6
CPU 特性 ................................................................................................................................ 6
周边特性 ................................................................................................................................. 6
概述 ..................................................................................................................................7
方框图 ..............................................................................................................................7
引脚图 ..............................................................................................................................8
引脚说明 ..........................................................................................................................9
极限参数 ........................................................................................................................14
直流电气特性 ................................................................................................................14
交流电气特性 ................................................................................................................17
A/D 转换器电气特性.....................................................................................................20
LVD & LVR 电气特性 ..................................................................................................22
比较器电气特性 ............................................................................................................23
LCD 电气特性 ...............................................................................................................24
上电复位特性 ................................................................................................................25
系统结构 ........................................................................................................................26
时序和流水线结构 ............................................................................................................... 26
程序计数器 ........................................................................................................................... 27
堆栈 ....................................................................................................................................... 27
算术逻辑单元 – ALU ........................................................................................................... 28
Flash 程序存储器 ..........................................................................................................29
结构 ....................................................................................................................................... 29
特殊向量 ............................................................................................................................... 29
查表 ....................................................................................................................................... 29
查表范例 ............................................................................................................................... 30
在线烧录 – ICP ..................................................................................................................... 31
片上调试 – OCDS................................................................................................................. 32
数据存储器 ....................................................................................................................33
结构 ....................................................................................................................................... 33
数据存储器寻址 ................................................................................................................... 34
通用数据存储器 ................................................................................................................... 34
特殊功能数据存储器 ........................................................................................................... 34
特殊功能寄存器 ............................................................................................................36
间接寻址寄存器 – IAR0,IAR1,IAR2............................................................................. 36
存储器指针 – MP0,MP1L/MP1H,MP2L/MP2H ........................................................... 36
累加器 – ACC ....................................................................................................................... 38
程序计数器低字节寄存器 – PCL ........................................................................................ 38
表格寄存器 – TBLP,TBHP,TBLH ................................................................................. 38
状态寄存器 – STATUS ......................................................................................................... 38
Rev. 1.10
2
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
EEPROM 数据存储器 ..................................................................................................40
EEPROM 数据存储器结构 .................................................................................................. 40
EEPROM 寄存器 .................................................................................................................. 40
从 EEPROM 中读取数据 ..................................................................................................... 41
写数据到 EEPROM .............................................................................................................. 42
写保护 ................................................................................................................................... 42
EEPROM 写中断 .................................................................................................................. 42
编程注意事项 ....................................................................................................................... 43
振荡器 ............................................................................................................................44
振荡器概述 ........................................................................................................................... 44
系统时钟配置 ....................................................................................................................... 44
外部晶体 / 陶瓷振荡器 – HXT ............................................................................................ 45
内部 RC 振荡器 – HIRC ...................................................................................................... 45
外部 32.768kHz 晶体振荡器 – LXT .................................................................................... 46
内部 32kHz 振荡器 – LIRC ................................................................................................. 47
辅助振荡器 ........................................................................................................................... 47
工作模式和系统时钟 ....................................................................................................48
系统时钟 ............................................................................................................................... 48
系统工作模式 ....................................................................................................................... 49
控制寄存器 ........................................................................................................................... 50
工作模式切换 ....................................................................................................................... 53
待机电流注意事项 ............................................................................................................... 57
唤醒 ....................................................................................................................................... 57
编程注意事项 ....................................................................................................................... 57
看门狗定时器 ................................................................................................................58
看门狗定时器时钟源 ........................................................................................................... 58
看门狗定时器控制寄存器 ................................................................................................... 58
看门狗定时器操作 ............................................................................................................... 59
复位和初始化 ................................................................................................................60
复位功能 ............................................................................................................................... 60
复位初始状态 ....................................................................................................................... 63
输入 / 输出端口 .............................................................................................................67
上拉电阻 ............................................................................................................................... 68
PA 口唤醒 ............................................................................................................................. 68
输入 / 输出端口控制寄存器 ................................................................................................ 69
输入 / 输出端口源电流控制 ................................................................................................ 69
引脚共用功能 ....................................................................................................................... 71
输入 / 输出引脚结构 ............................................................................................................ 79
编程注意事项 ....................................................................................................................... 80
定时器模块 – TM ..........................................................................................................81
简介 ....................................................................................................................................... 81
TM 操作 ................................................................................................................................ 81
TM 时钟源 ............................................................................................................................ 81
TM 中断 ................................................................................................................................ 81
Rev. 1.10
3
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
TM 外部引脚 ........................................................................................................................ 82
TM 外部引脚控制寄存器 .................................................................................................... 82
编程注意事项 ....................................................................................................................... 83
简易型 TM – CTM........................................................................................................84
简易型 TM 操作 ................................................................................................................... 84
简易型 TM 寄存器介绍 ....................................................................................................... 84
简易型 TM 工作模式 ........................................................................................................... 88
标准型 TM – STM ........................................................................................................94
标准型 TM 操作 ................................................................................................................... 94
标准型 TM 寄存器介绍 ...................................................................................................... 94
标准型 TM 工作模式 ........................................................................................................... 98
周期型 TM – PTM ......................................................................................................108
周期型 TM 操作 ................................................................................................................. 108
周期型 TM 寄存器介绍 ..................................................................................................... 109
周期型 TM 工作模式 ......................................................................................................... 113
A/D 转换器...................................................................................................................122
A/D 转换器简介 ................................................................................................................. 122
A/D 转换寄存器介绍 ......................................................................................................... 123
A/D 转换器操作 ................................................................................................................. 126
A/D 转换器参考电压 ......................................................................................................... 127
A/D 转换器输入信号 ......................................................................................................... 127
A/D 转换率及时序图 ......................................................................................................... 128
A/D 转换步骤 ..................................................................................................................... 129
编程注意事项 ..................................................................................................................... 130
A/D 转换功能 ..................................................................................................................... 130
A/D 转换应用范例 ............................................................................................................. 131
比较器 ..........................................................................................................................133
比较器操作 ......................................................................................................................... 133
比较器寄存器 ..................................................................................................................... 133
输入失调校准 ..................................................................................................................... 135
串行接口模块 – SIM ...................................................................................................136
SPI 接口 .............................................................................................................................. 136
I2C 接口 ............................................................................................................................... 142
UART 接口 ..................................................................................................................152
UART 外部引脚.................................................................................................................. 152
UART 数据传输方案.......................................................................................................... 153
UART 状态和控制寄存器.................................................................................................. 153
波特率发生器 ..................................................................................................................... 158
UART 模块的设置与控制.................................................................................................. 158
UART 发送器...................................................................................................................... 159
UART 接收器...................................................................................................................... 160
接收错误处理 ..................................................................................................................... 162
UART 模块中断结构.......................................................................................................... 163
UART 模块暂停和唤醒...................................................................................................... 164
Rev. 1.10
4
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
带 SCOM 功能的 LCD ...............................................................................................165
LCD 操作 ............................................................................................................................ 165
LCD 偏压控制 .................................................................................................................... 165
中断 ..............................................................................................................................166
中断寄存器 ......................................................................................................................... 166
中断操作 ............................................................................................................................. 171
外部中断 ............................................................................................................................. 172
比较器中断 ......................................................................................................................... 172
多功能中断 ......................................................................................................................... 172
A/D 转换器中断 ................................................................................................................. 172
时基中断 ............................................................................................................................. 173
EEPROM 中断 .................................................................................................................... 175
LVD 中断 ............................................................................................................................ 175
TM 中断 .............................................................................................................................. 175
SIM 中断 ............................................................................................................................. 175
UART 中断.......................................................................................................................... 175
中断唤醒功能 ..................................................................................................................... 176
编程注意事项 ..................................................................................................................... 176
低电压检测 – LVD ......................................................................................................177
LVD 寄存器 ........................................................................................................................ 177
LVD 操作 ............................................................................................................................ 178
配置选项 ......................................................................................................................179
应用电路 ......................................................................................................................180
指令集 ..........................................................................................................................181
简介 ..................................................................................................................................... 181
指令周期 ............................................................................................................................. 181
数据的传送 ......................................................................................................................... 181
算术运算 ............................................................................................................................. 181
逻辑和移位运算 ................................................................................................................. 181
分支和控制转换 ................................................................................................................. 182
位运算 ................................................................................................................................. 182
查表运算 ............................................................................................................................. 182
其它运算 ............................................................................................................................. 182
指令集概要 ..................................................................................................................183
惯例 ..................................................................................................................................... 183
扩展指令集 ......................................................................................................................... 186
指令定义 ......................................................................................................................188
扩展指令定义 ..................................................................................................................... 200
封装信息 ......................................................................................................................210
48-pin LQFP (7mm × 7mm) 外形尺寸 ............................................................................... 211
Rev. 1.10
5
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
特性
CPU 特性
● 工作电压:
♦ fSYS = 4MHz:1.8V~5.5V
♦ fSYS = 8MHz:2.0V~5.5V
♦ fSYS = 12MHz:2.7V~5.5V
♦ fSYS = 16MHz:3.3V~5.5V
● VDD=5V,系统时钟为 16MHz 时,指令周期为 0.25μs
● 提供暂停和唤醒功能,以降低功耗
● 振荡器类型:
♦ 外部晶振 – HXT
♦ 外部 32.768kHz 晶振 – LXT
♦ 内部 RC – HIRC
♦ 内部 32kHz RC – LIRC
● 多种工作模式:正常、低速、空闲和休眠
● 内部集成 4/8/12MHz 振荡器,无需外接元件
● 所有指令都可在 1~3 个指令周期内完成
● 查表指令
● 115 条指令
● 16 层堆栈
● 位操作指令
周边特性
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Rev. 1.10
Flash 程序存储器:8K×16
RAM 数据存储器:256×8
True EEPROM 存储器:64×8
看门狗定时器功能
44 个双向 I/O 口
软件控制的 4-SCOM 口 1/2 偏压的 LCD 驱动器
2 个引脚与外部中断口共用
多个定时器模块用于时间测量、捕捉输入、比较匹配输出、PWM 输出及单脉
冲输出
比较器功能
双时基功能,可提供固定时间的中断信号
16 通道 12-bit 的 A/D 转换器
串行接口,支持 I2C,SPI 和全双工 UART 通信
PMOS 源电流可调
低电压复位功能
低电压检测功能
封装类型:48-pin LQFP
6
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
概述
该单片机是一款 8 位高性能精简指令集的 Flash 型单片机,具有一系列功能和
特性,其 Flash 存储器可多次编程的特性给用户提供了较大的方便。存储器方
面,还包含了一个 RAM 数据存储器和一个可用于存储序列号、校准数据等非
易失性数据的 True EEPROM 存储器。
在模拟特性方面,该单片机包含一个多通道 12 位 A/D 转换器和比较器功能。
还带有多个使用灵活的定时器模块,可提供定时功能、脉冲产生功能及 PWM
产生等功能。内建 I2C,SPI 和 UART 功能,为设计者提供了一个易于外部硬件
通信的接口。内部看门狗定时器、低电压复位和低电压检测等内部保护特性,
外加优秀的抗干扰和 ESD 保护性能,确保单片机在恶劣的电磁干扰环境下可靠
地运行。
该单片机提供了丰富的内部、外部及高速、低速振荡器功能选项,其中包括完
全内建的系统振荡器,无需外接元件。其在不同工作模式之间动态切换的能力,
为用户提供了一个优化单片机操作和减少功耗的手段。
该单片机内置 UART 模块,它可以支持诸如单片机之间的数据通信交换,PC
和外部设备间的低成本数据连接,便携式和电池供电设备间的通信等。
外加时基功能、I/O 使用灵活等其它特性,使这款单片机可以广泛应用于各种
产品中,例如电子测量仪器、环境监控、手持式测量工具、家庭应用、电子控
制工具、马达控制等方面。
方框图
Flash / EEPROM
Programming Circuitry
EEPROM
Data
Memory
Flash
Program
Memory
Internal RC
Oscillators
Watchdog
Timer
Low
Voltage
Detect
Low
Voltage
Reset
RAM
Data
Memory
Time
Bases
8- bit
RISC
MCU
Core
Reset
Circuit
Interrupt
Controller
LXT
Oscillator
HXT
Oscillator
12- bit A/ D
Converter
LCD Driver
UART
Rev. 1.10
SIM
(I2C / SPI)
Timer
Modules
I/O
7
LED Driver
Comparator
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
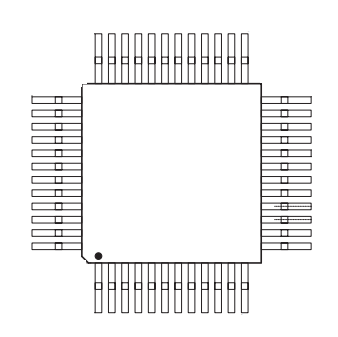
引脚图
PA5/SCK/SCL
PA1/INT0/SCS
PA2/ICPCK/OCDSCK
PC6/STPI/STP/AN6
PC7/STCK/STPB/AN7
PD0/AN8
PD1/AN9
PD2/AN10
PD3/AN11
PD4/AN12
PD5/AN13
PD6/AN14
PF6/AN15/CPF7/C+
PB0/CX
PB1/PTPI/PTP
PB2/PTCK/PTPB
PB3/CTP
PB4/CTCK/CTPB
PB5
VDD
VSS
PB6/OSC1
PB7/OSC2
48 47 46 45 44 43 42 41 40 39 38 37
36
1
35
2
34
3
33
4
5
32
31
6
HT66F3197/HT66V3197
7
30
48 LQFP-A
29
8
28
9
27
10
26
11
25
12
13 14 15 16 17 18 19 20 21 22 23 24
PC5/AN5
PC4/AN4
PC3/PTCK/PTPB/AN3
PC2/PTPI/PTP/AN2
PC1/AN1/CMPO/VREF
PC0/AN0/VREFI
AVSS
PF5/XT1
PF4/XT2
AVDD
PF3/SCK/SCL/SCOM3
PF2/SDI/SDA/SCOM2
PF1/SDO/SCOM1
PF0/SCS/SCOM0
PE4
PE3/CTP
PE2/CTCK/CTPB
PE1/STPI/STP
PE0/STCK/STPB
PA7/INT1/TX
PA6/INT0/RX
PA0/ICPDA/OCDSDA
PA4/SDI/SDA
PA3/INT1/SDO
注:1、若一引脚可用作多种功能输出引脚,所需的引脚功能可通过对应的引脚共用功能选择寄存器设置。
2、HT66V3197 是 HT66F3197 的 EV 芯片,OCDSCK 和 OCDSDA 引脚功能仅存在于 OCDS EV 芯片。
Rev. 1.10
8
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
引脚说明
除了电源引脚外,该单片机的所有引脚都以它的端口名称进行标注,例如
PA0、PA1 等,用于描述这些引脚的数字输入 / 输出功能。然而,这些引脚也与
其它功能共用,如模数转换器、定时器模块等。每个引脚的功能如下表所述,
而引脚配置的详细内容见规格书其它章节。
引脚名称
I/T
O/T
ST
CMOS
ICPDA
OPT
PAPU
PAWU
PAS0
─
ST
OCDSDA
─
ST
CMOS ICP 数据 / 地址
OCDS 数据 / 地址,仅用于 EV 芯
CMOS
片
ST
CMOS
ST
─
功能
PA0
PA0/ICPDA/
OCDSDA
PA1
PA1/INT0/SCS
INT0
SCS
PA2/ICPCK/
OCDSCK
PA2
ICPCK
OCDSCK
PA3
PA3/INT1/SDO
INT1
SDO
PA4
PA4/SDI/SDA
SDI
SDA
PA5
PA5/SCK/SCL
SCK
SCL
Rev. 1.10
PAPU
PAWU
PAS0
PAS0
IFS1
INTEG
PAS0
IFS0
PAPU
PAWU
PAS0
─
─
PAPU
PAWU
PAS0
PAS0
IFS1
INTEG
PAS0
PAPU
PAWU
PAS1
PAS1
IFS0
PAS1
IFS0
PAPU
PAWU
PAS1
PAS1
IFS0
PAS1
IFS0
说明
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
外部中断 0
ST
CMOS SPI 从机选择
ST
CMOS
ST
ST
─
─
ST
CMOS
ST
─
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
ICP 时钟
OCDS 时钟,仅用于 EV 芯片
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
外部中断 1
─
CMOS SPI 数据输出
ST
CMOS
ST
─
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
SPI 数据输入
ST
NMOS I2C 数据输入 / 输出
ST
CMOS
ST
CMOS SPI 串行时钟
ST
NMOS I2C 时钟
9
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
引脚名称
功能
PA6
PA6/INT0/RX
INT0
RX
PA7
PA7/INT1/TX
INT1
TX
PB0/CX
PB0
CX
PB1
PB1/PTPI/PTP
PTPI
PTP
PB2
PB2/PTCK/
PTPB
PTCK
PTPB
PB3/CTP
PB3
CTP
PB4
PB4/CTCK/
CTPB
CTCK
CTPB
PB5
PB6/OSC1
PB7/OSC2
Rev. 1.10
PB5
PB6
OSC1
PB7
OSC2
OPT
PAPU
PAWU
PAS1
PAS1
IFS1
INTEG
PAS1
UCR1
PAPU
PAWU
PAS1
PAS1
IFS1
INTEG
PAS1
UCR1
PBPU
PBS0
PBS0
PBPU
PBS0
PBS0
IFS0
PBS0
PBPU
PBS0
PBS0
IFS0
PBS0
PBPU
PBS0
PBS0
PBPU
PBS1
PBS1
IFS0
PBS1
PBPU
PBS1
PBPU
PBS1
PBS1
PBPU
PBS1
PBS1
I/T
O/T
ST
CMOS
ST
─
外部中断 0
ST
─
UART 串行数据接收引脚
ST
CMOS
ST
─
说明
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
通用 I/O 口,可通过寄存器设置
上拉电阻和唤醒功能
外部中断 1
─
CMOS UART 串行数据发送引脚
ST
CMOS
─
ST
ST
─
ST
ST
─
ST
─
ST
ST
─
ST
ST
HXT
ST
─
10
通用 I/O 口,可通过寄存器设置
上拉电阻
CMOS 比较器输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
PTM 捕捉输入
CMOS PTM 输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
PTM 时钟输入
CMOS PTM 反相输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
CMOS CTM 输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
CTM 时钟输入
CMOS CTM 反相输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
HXT 振荡器引脚
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
HXT HXT 振荡器引脚
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
引脚名称
功能
PC0
PC0/AN0/VREFI
AN0
VREFI
PC1
PC1/AN1/
CMPO/VREF
AN1
CMPO
VREF
PC2
PC2/PTPI/PTP/
AN2
PTPI
PTP
AN2
PC3
PC3/PTCK/
PTPB/AN3
PC4/AN4
PC5/AN5
PTCK
PTPB
AN3
PC4
AN4
PC5
AN5
PC6
PC6/STPI/STP/
AN6
STPI
STP
AN6
PC7
PC7/STCK/
STPB/AN7
Rev. 1.10
STCK
STPB
AN7
OPT
PCPU
PCS0
PCS0
PCS0
SADC2
PCPU
PCS0
PCS0
PCS0
CMPC
PCS0
SADC2
PCPU
PCS0
PCS0
IFS0
PCS0
PCS0
PCPU
PCS0
PCS0
IFS0
PCS0
PCS0
PCPU
PCS1
PCS1
PCPU
PCS1
PCS1
PCPU
PCS1
PCS1
IFS0
PCS1
PCS1
PCPU
PCS1
PCS1
IFS0
PCS1
PCS1
I/T
ST
AN
O/T
说明
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
A/D 转换器输入通道 0
AN
─
ST
CMOS
AN
─
─
─
ST
CMOS
ST
─
ST
ST
─
AN
ST
AN
ST
AN
ST
ST
─
AN
ST
ST
─
AN
11
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 1
CMOS 比较器输出
AN
─
AN
A/D 转换器 PGA 参考电压输入
A/D 转换器参考电压输入
通用 I/O 口,可通过寄存器设置
上拉电阻
PTM 捕捉输入
CMOS PTM 输出
─
A/D 转换器输入通道 2
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
PTM 时钟输入
CMOS PTM 反相输出
─
A/D 转换器输入通道 3
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
A/D 转换器输入通道 4
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
A/D 转换器输入通道 5
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
STM 捕捉输入
CMOS STM 输出
─
A/D 转换器输入通道 6
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
STM 时钟输入
CMOS STM 反相输出
─
A/D 转换器输入通道 7
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
引脚名称
PD0/AN8
PD1/AN9
PD2/AN10
PD3/AN11
PD4/AN12
PD5/AN13
PD6/AN14
功能
PD0
AN8
PD1
AN9
PD2
AN10
PD3
AN11
PD4
AN12
PD5
AN13
PD6
AN14
PE0
PE0/STCK/STPB
STCK
STPB
PE1
PE1/STPI/STP
STPI
STP
PE2
PE2/CTCK/
CTPB
CTCK
CTPB
PE3/CTP
PE4
Rev. 1.10
PE3
CTP
PE4
OPT
PDPU
PDS0
PDS0
PDPU
PDS0
PDS0
PDPU
PDS0
PDS0
PDPU
PDS0
PDS0
PDPU
PDS1
PDS1
PDPU
PDS1
PDS1
PDPU
PDS1
PDS1
PEPU
PES0
PES0
IFS0
PES0
PEPU
PES0
PES0
IFS0
PES0
PEPU
PES0
PES0
IFS0
PES0
PEPU
PES0
PES0
PEPU
PES1
I/T
O/T
ST
CMOS
AN
─
ST
CMOS
AN
─
ST
CMOS
AN
─
ST
CMOS
AN
─
ST
CMOS
AN
─
ST
CMOS
AN
─
ST
CMOS
AN
─
ST
CMOS
ST
─
─
ST
ST
─
ST
ST
─
ST
ST
ST
12
说明
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 8
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 9
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 10
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 11
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 12
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 13
通用 I/O 口,可通过寄存器设置
上拉电阻
A/D 转换器输入通道 14
通用 I/O 口,可通过寄存器设置
上拉电阻
STM 时钟输入
CMOS STM 反相输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
STM 捕捉输入
CMOS STM 输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
CTM 时钟输入
CMOS CTM 反相输出
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
CTM 时钟输入
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
引脚名称
功能
PF0
PF0/SCS/
SCOM0
SCS
SCOM0
PF1
PF1/SDO/
SCOM1
SDO
SCOM1
PF2
PF2/SDI/SDA/
SCOM2
SDI
SDA
SCOM2
PF3
PF3/SCK/SCL/
SCOM3
SCK
SCL
SCOM3
PF4/XT2
PF5/XT1
PF4
XT2
PF5
XT1
PF6
PF6/AN15/C-
AN15
CPF7
PF7/C+
VDD
Rev. 1.10
C+
VDD
OPT
PFPU
PFS0
PFS0
IFS0
PFS0
SCOMC
PFPU
PFS0
PFS0
PFS0
SCOMC
PFPU
PFS0
PFS0
IFS0
PFS0
IFS0
PFS0
SCOMC
PFPU
PFS0
PFS0
IFS0
PFS0
IFS0
PFS0
SCOMC
PFPU
PFS1
PFS1
PFPU
PFS1
PFS1
PFPU
PFS1
PFS1
PFS1
CMPC
CMPVOS
PFPU
PFS1
PFS1
CMPC
CMPVOS
─
I/T
O/T
ST
说明
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
ST
CMOS SPI 从机选择
─
SCOM S/W LCD COM 输出
ST
CMOS
─
通用 I/O 口,可通过寄存器设置
上拉电阻
CMOS SPI 数据输出
─
SCOM S/W LCD COM 输出
ST
CMOS
ST
─
通用 I/O 口,可通过寄存器设置
上拉电阻
SPI 数据输入
ST
NMOS I2C 数据输入 / 输出
─
SCOM S/W LCD COM 输出
ST
CMOS
ST
CMOS SPI 串行时钟
ST
NMOS I2C 时钟
─
SCOM S/W LCD COM 输出
ST
CMOS
─
ST
LXT
ST
AN
通用 I/O 口,可通过寄存器设置
上拉电阻
通用 I/O 口,可通过寄存器设置
上拉电阻
LXT LXT 振荡器引脚
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
LXT 振荡器引脚
通用 I/O 口,可通过寄存器设置
CMOS
上拉电阻
─
A/D 转换器输入通道 15
AN
─
ST
CMOS
AN
─
比较器正输入端
PWR
─
电源电压正极
13
比较器负输入端
通用 I/O 口,可通过寄存器设置
上拉电阻
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
引脚名称
AVDD
VSS
AVSS
功能
AVDD
VSS
AVSS
OPT
─
─
─
I/T
PWR
PWR
PWR
O/T
─
─
─
说明
ADC 电源电压正极
电源电压负极,接地
ADC 电源电压接地端
O/T:输出类型;
注:I/T:输入类型;
OP:通过寄存器设置;
PWR:电源;
CMOS:CMOS 输出;
SCOM:S/W LCD COM 输出;
HXT:高频晶体振荡器;
ST:斯密特触发输入;
NMOS:NMOS 输出
AN:模拟信号;
LXT:低频晶体振荡器;
极限参数
电源供应电压 .............................................................................VSS-0.3V~VSS+6.0V
端口输入电压 ............................................................................ VSS-0.3V~VDD+0.3V
储存温度 .............................................................................................. -50°C~125°C
工作温度 ................................................................................................ -40°C~85°C
IOL总电流 ............................................................................................................ 80mA
IOH总电流 .......................................................................................................... -80mA
总功耗 ............................................................................................................. 500mW
注:这里只强调额定功率,超过极限参数所规定的范围将对芯片造成损害,无法预期芯片在
上述标示范围外的工作状态,而且若长期在标示范围外的条件下工作,可能影响芯片的
可靠性。
直流电气特性
Ta = 25°C
符号
参数
VDD
工作电压 (HXT)
─
工作电压 (HIRC)
─
工作电压 (LXT)
工作电压 (LIRC)
─
─
VDD
Rev. 1.10
测试条件
条件
fSYS = fHXT = 4MHz
fSYS = fHXT = 8MHz
fSYS = fHXT = 12MHz
fSYS = fHXT = 16MHz
fSYS = fHIRC = 4MHz
fSYS = fHIRC = 8MHz
fSYS = fHIRC = 12MHz
fSYS = fLXT = 32.768kHz
fSYS = fLIRC = 32kHz
14
最小 典型 最大 单位
1.8
2.0
2.7
3.3
1.8
2.0
2.7
1.8
1.8
─
─
─
─
─
─
─
─
─
5.5
5.5
5.5
5.5
5.5
5.5
5.5
5.5
5.5
V
V
V
V
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
符号
参数
工作电流 (HXT)
工作电流 (HIRC)
IDD
工作电流 (LXT)
工作电流 (LIRC)
工作电流,fH = 8MHz
(HIRC)
工作电流,fH = 12MHz
(HXT)
Rev. 1.10
VDD
3V
5V
3V
5V
3V
5V
测试条件
条件
无负载,所有外设关闭,
fSYS = fHXT = 4MHz
无负载,所有外设关闭,
fSYS = fHXT = 8MHz
无负载,所有外设关闭,
fSYS = fHXT = 12MHz
5V
无负载,所有外设关闭,
fSYS = fHXT = 16MHz
3V
5V
3V
5V
3V
5V
3V
5V
3V
5V
3V
5V
3V
5V
3V
5V
3V
5V
无负载,所有外设关闭,
fSYS = fHIRC = 4MHz
无负载,所有外设关闭,
fSYS = fHIRC = 8MHz
无负载,所有外设关闭,
fSYS = fHIRC = 12MHz
无负载,所有外设关闭,
fSYS = fLXT = 32768Hz
无负载,所有外设关闭,
fSYS = fLIRC = 32kHz
无负载,所有外设关闭,
fSYS = fH/2
无负载,所有外设关闭,
fSYS = fH/64
无负载,所有外设关闭,
fSYS = fH/2
无负载,所有外设关闭,
fSYS = fH/64
15
最小 典型 最大 单位
─
─
─
─
─
─
0.5
1.0
0.8
1.6
1.2
2.4
0.8
1.5
1.2
2.4
1.8
3.6
─
3.0
4.5
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
0.5
1.0
0.8
1.6
1.2
2.4
10
30
10
30
0.5
1.0
0.25
0.5
0.7
1.4
0.35
0.7
0.8
1.5
1.2
2.4
1.8
3.6
20
50
20
50
1.0
2.0
0.5
1.0
1.4
2.8
0.7
1.4
mA
mA
mA
mA
mA
mA
mA
μA
μA
mA
mA
mA
mA
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
符号
ISTB
参数
VDD
3V
5V
待机电流 (SLEEP 模式 )
3V
5V
3V
待机电流 (IDLE0 模式 )
5V
3V
5V
3V
待机电流
(IDLE1 模式,HIRC)
5V
3V
5V
3V
5V
3V
待机电流
5V
(IDLE1 模式,HXT)
3V
5V
测试条件
条件
无负载,所有外设关闭,
WDT off
无负载,所有外设关闭,
WDT on
无负载,所有外设关闭,
fSUB on
无负载,所有外设关闭,
fSUB on,fSYS = fHIRC = 4MHz
无负载,所有外设关闭,
fSUB on,fSYS = fHIRC = 8MHz
无负载,所有外设关闭,
fSUB on,fSYS = fHIRC = 12MHz
无负载,所有外设关闭,
fSUB on,fSYS = fHXT = 4MHz
无负载,所有外设关闭,
fSUB on,fSYS = fHXT = 8MHz
无负载,所有外设关闭,
fSUB on,fSYS = fHXT = 12MHz
最小 典型 最大 单位
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
─
无负载,所有外设关闭,
─
fSUB on,fSYS = fHXT = 16MHz
5V
─
0
─
─
0
5V
3.5
─
─
─
0.8VDD
1.8V
7
3V VOL = 0.1VDD
16
5V
32
3V VOH = 0.9VDD,
-1.0
SLEDCn[m+1, m] = 00B
5V (n = 0,1,2; m = 0,2,4,6) -2.0
3V VOH = 0.9VDD,
-1.75
SLEDCn[m+1, m] = 01B
5V (n = 0,1,2; m = 0,2,4,6) -3.5
5V
VIL
I/O 口低电平输入电压
VIH
I/O 口高电平输入电压
IOL
I/O 口灌电流
IOH
I/O 口源电流
Rev. 1.10
3V VOH = 0.9VDD,
SLEDCn[m+1, m] = 10B
5V (n = 0,1,2; m = 0,2,4,6)
3V VOH = 0.9VDD,
SLEDCn[m+1, m] = 11B
5V (n = 0,1,2; m = 0,2,4,6)
16
0.2
0.5
─
─
3
5
0.25
0.5
0.5
1.0
0.7
1.4
0.25
0.5
0.5
1.0
0.7
1.5
0.8
1.0
3
5
5
10
0.5
1.0
1.0
2.0
1.4
2.8
0.5
1.0
1.0
2.0
1.4
3.0
2.0
4.0
─
─
─
─
14
32
64
μA
μA
μA
mA
mA
mA
mA
mA
mA
mA
1.5
V
0.2VDD
5.0
V
VDD
─
─
mA
─
-2.0
─
-4.0
─
-3.5
─
-7.0
─
-2.5
-5.0
─
-5.0
-10
─
-5.5
-11
─
-11
-22
─
mA
mA
mA
mA
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
符号
RPH
参数
I/O 口上拉电阻
测试条件
VDD
条件
3V
LVPU = 0
5V
3V
LVPU = 1
5V
最小 典型 最大 单位
20
10
6.67
3.5
60
30
15
7.5
100
50
23
12
kΩ
kΩ
交流电气特性
Ta = 25°C
符号
参数
系统时钟 (HXT)
fSYS
系统时钟 (HIRC)
系统时钟 (LXT)
系统时钟 (LIRC)
Rev. 1.10
VDD
1.8V~5.5V
2.0V~5.5V
2.7V~5.5V
3.3V~5.5V
1.8V~5.5V
2.0V~5.5V
2.7V~5.5V
1.8V~5.5V
1.8V~5.5V
测试条件
条件
fSYS = fHXT = 4MHz
fSYS = fHXT = 8MHz
fSYS = fHXT = 12MHz
fSYS = fHXT = 16MHz
fSYS = fHIRC = 4MHz
fSYS = fHIRC = 8MHz
fSYS = fHIRC = 12MHz
fSYS = fLXT = 32.768kHz
fSYS = fLIRC = 32kHz
17
最小
典型
─
─
─
─
─
─
─
─
─
4
8
12
16
4
8
12
32.768
32
最大 单位
─
─
─
─
─
─
─
─
─
MHz
MHz
kHz
kHz
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
符号
参数
内部高速 RC 振荡器
(HIRC = 4MHz,
trim 4MHz @ VDD = 3V)
内部高速 RC 振荡器
(HIRC = 4MHz,
trim 4MHz @ VDD = 5V)
fHIRC
内部高速 RC 振荡器
(HIRC = 8MHz,
trim 8MHz @ VDD = 3V)
内部高速 RC 振荡器
(HIRC = 8MHz,
trim 8MHz @ VDD = 5V)
内部高速 RC 振荡器
(HIRC = 12MHz,
trim 12MHz @ VDD = 5V)
Rev. 1.10
VDD
3.0V
2.2V~5.5V
3.0V
3.0V
2.2V~5.5V
2.2V~5.5V
3.0V
3.0V
5.0V
2.2V~5.5V
5.0V
5.0V
2.2V~5.5V
2.2V~5.5V
5.0V
5.0V
3.0V
3.0V~5.5V
3.0V
3.0V
3.0V~5.5V
3.0V~5.5V
3.0V
3.0V
5.0V
3.0V~5.5V
5.0V
5.0V
3.0V~5.5V
3.0V~5.5V
5.0V
5.0V
5.0V
4.0V~5.5V
5.0V
5.0V
4.0V~5.5V
4.0V~5.5V
5.0V
5.0V
测试条件
条件
Ta = 25°C
Ta = 25°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 25°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 0°C~70°C
Ta = -40°C~85°C
Ta = 25°C
Ta = 25°C
18
最小
典型
-2%
-5%
-5%
-5%
-7%
-10%
-20%
-20%
-2%
-5%
-5%
-5%
-7%
-10%
-20%
-20%
-2%
-5%
-5%
-5%
-7%
-10%
-20%
-20%
-2%
-5%
-5%
-5%
-7%
-10%
-20%
-20%
-2%
-5%
-5%
-5%
-7%
-10%
-20%
-20%
4
4
4
4
4
4
8
12
4
4
4
4
4
4
8
12
8
8
8
8
8
8
4
12
8
8
8
8
8
8
4
12
12
12
12
12
12
12
4
8
最大 单位
+2%
+5%
+5%
+5%
+7%
+10%
+20%
+20%
+2%
+5%
+5%
+5%
+7%
+10%
+20%
+20%
+2%
+5%
+5%
+5%
+7%
+10%
+20%
+20%
+2%
+5%
+5%
+5%
+7%
+10%
+20%
+20%
+2%
+5%
+5%
+5%
+7%
+10%
+20%
+20%
MHz
MHz
MHz
MHz
MHz
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
符号
fLIRC
tTCK
tTPI
tINT
tSRESET
tEERD
tEEWR
tRSTD
参数
LIRC 频率
CTCK,STCK,PTCK
引脚最小输入脉宽
STPI,PTPI 引脚最小
输入脉宽
外部中断最小输入脉宽
最小软件复位时间
EEPROM 读周期
EEPROM 写周期
系统复位延迟时间
( 上电复位,LVR 硬件
复位,LVRC/WDTC/
RSTC 软件复位 )
系统复位延迟时间
(WDT 溢出硬件复位 )
测试条件
条件
Ta = 25°C
2.2V~5.5V
Ta = -40°C~85°C
VDD
tSST
系统启动时间
( 正常模式 ↔ 低速模
式或 fH = fHXT ↔ fHIRC 或
fSUB = fLXT ↔ fLIRC)
系统启动时间
( 从 fSYS on 的 Pown
down 状态下唤醒 )
系统启动时间
(WDT 溢出硬件冷复位 )
典型
最大 单位
-5%
-10%
32
32
+5%
kHz
+10%
─
─
0.3
─
─
μs
─
─
0.3
─
─
μs
─
─
─
─
─
─
─
─
10
45
─
─
─
90
─
2
─
120
4
4
μs
μs
tSYS
ms
─
─
25
50
100
ms
─
─
8.3
16.7
33.3
ms
─
─
tLXT
─
─
tHXT
─
─
tHIRC
─
─
─
fSYS = fSUB = fLXT
1024
fSYS = fH~fH / 64,
128
fH = fHXT
fSYS = fH~fH / 64,
16
fH = fHIRC
fSYS = fSUB = fLIRC
2
fHXT off → on (HXTF = 1) 1024
fHIRC off → on (HIRCF = 1) 16
─
─
─
─
─
─
tLIRC
tHXT
tHIRC
─
fLXT off → on (LXTF = 1) 1024
─
─
tLXT
2
─
─
tH
2
─
─
tSUB
0
─
─
tH
─
系统启动时间
( 从 fSYS off 的 Pown
down 状态下唤醒 )
最小
─
─
─
─
fSYS = fH~fH / 64,
fSYS = fHXT 或 fHIRC
fSYS = fLXT 或 fLIRC
─
─
注:1. tSYS = 1/fSYS。
2. 为保证 HIRC 振荡器频率的精确度,建议在 VDD 和 VSS 之间连接一个 0.1μF 的电容,并尽可能靠
近单片机。
Rev. 1.10
19
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
A/D 转换器电气特性
符号
VDD
VADI
VREF
参数
A/D 转换器工作电压
A/D 转换器输入电压
A/D 转换器参考电压
Ta = 25°C
VDD
─
─
─
1.8V
2V
3V
DNL
非线性微分误差
5V
1.8V
3V
5V
Rev. 1.10
测试条件
条件
─
─
─
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 2.0μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 0.5μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 0.5μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 0.5μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 10μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 10μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 10μs
20
最小 典型 最大 单位
1.8
0
1.8
─
─
─
5.5
VREF
VDD
V
V
V
─
─
±3
LSB
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
符号
参数
VDD
1.8V
2V
3V
INL
非线性积分误差
5V
1.8V
3V
5V
IADC
A/D 转换器使能的额外
电流
tADCK
A/D 转换器时钟周期
tON2ST
tADS
tADC
IPGA
VCM
Rev. 1.10
A/D 转换器 On-to-Start
时间
A/D 采样时间
A/D 转换时间
( 包括采样和保持时间 )
PGA 使能的额外电流
PGA 共模电压范围
1.8V
3V
5V
─
测试条件
条件
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 2.0μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 0.5μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 0.5μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 0.5μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 10μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 10μs
SAINS[3:0] = 0000B,
SAVRS[1:0] = 01B,
VREF = VDD, tADCK = 10μs
无负载 (tADCK = 2.0μs)
无负载 (tADCK = 0.5μs)
无负载 (tADCK = 0.5μs)
1.8V≤VDD[m+1]?
no
yes,exchange [m] and [m+1] data
注:“m”是位于任何数据存储器 Sector 的某一地址。例如,m=1F0H 表示 Sector 1 中的地
址 0F0H。
Rev. 1.10
37
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
累加器 – ACC
对任何单片机来说,累加器是相当重要的,且与 ALU 所完成的运算有密切关
系,所有 ALU 得到的运算结果都会暂时存在 ACC 累加器里。若没有累加器,
ALU 必须在每次进行如加法、减法和移位的运算时,将结果写入到数据存储器,
这样会造成程序编写和时间的负担。另外数据传送也常常牵涉到累加器的临时
储存功能,例如在使用者定义的一个寄存器和另一个寄存器之间传送数据时,
由于两寄存器之间不能直接传送数据,因此必须通过累加器来传送数据。
程序计数器低字节寄存器 – PCL
为了提供额外的程序控制功能,程序计数器低字节设置在数据存储器的特殊功
能区域内,程序员可对此寄存器进行操作,很容易的直接跳转到其它程序地址。
直接给 PCL 寄存器赋值将导致程序直接跳转到程序存储器的某一地址,然而由
于寄存器只有 8 位长度,因此只允许在本页的程序存储器范围内进行跳转,而
当使用这种运算时,要注意会插入一个空指令周期。
表格寄存器 – TBLP,TBHP,TBLH
这三个特殊功能寄存器对存储在程序存储器中的表格进行操作。TBLP 和 TBHP
为表格指针,指向表格数据存储的地址。它们的值必须在任何表格读取指令执
行前加以设定,由于它们的值可以被如“INC”或“DEC”的指令所改变,这
就提供了一种简单的方法对表格数据进行读取。表格读取数据指令执行之后,
表格数据高字节存储在 TBLH 中。其中要注意的是,表格数据低字节会被传送
到使用者指定的地址。
状态寄存器 – STATUS
这 8 位的状态寄存器由 SC 标志位、CZ 标志位、零标志位 (Z)、进位标志位 (C)、
辅助进位标志位 (AC)、溢出标志位 (OV)、暂停标志位 (PDF) 和看门狗定时器
溢出标志位 (TO) 组成。这些算术 / 逻辑操作和系统运行标志位是用来记录单片
机的运行状态。
除了 PDF 和 TO 标志外,状态寄存器中的位像其它大部分寄存器一样可以被改
变。任何数据写入到状态寄存器将不会改变 TO 或 PDF 标志位。另外,执行不
同的指令后,与状态寄存器有关的运算可能会得到不同的结果。TO 标志位只会
受系统上电、看门狗溢出或执行“CLR WDT”或“HALT”指令影响。PDF 标
志位只会受执行“HALT”或“CLR WDT”指令或系统上电影响。
SC、CZ、Z、OV、AC 和 C 标志位通常反映最近运算的状态。
● C:当加法运算的结果产生进位,或减法运算的结果没有产生借位时,则 C
被置位,否则 C 被清零,同时 C 也会被带进位的移位指令所影响。
● AC:当低半字节加法运算的结果产生进位,或低半字节减法运算的结果没有
产生借位时,AC 被置位,否则 AC 被清零。
● Z:当算术或逻辑运算结果是零时,Z 被置位,否则 Z 被清零。
● OV:当运算结果高两位的进位状态异或结果为 1 时,OV 被置位,否则 OV
被清零。
● PDF:系统上电或执行“CLR WDT”指令会清零 PDF,而执行“HALT”指
令则会置位 PDF。
● TO:系统上电或执行“CLR WDT”或“HALT”指令会清零 TO,而当 WDT
溢出则会置位 TO。
Rev. 1.10
38
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● CZ:不同指令不同标志位的操作结果。详细资料请参考寄存器定义部分。
● SC:当 OV 与当前指令操作结果 MSB 执行“XOR”所得结果。
另外,当进入一个中断程序或执行子程序调用时,状态寄存器不会自动压入到
堆栈保存。假如状态寄存器的内容是重要的且子程序可能改变状态寄存器的话,
则需谨慎的去做正确的储存。
STATUS 寄存器
Bit
Name
R/W
POR
7
SC
R
x
6
CZ
R
x
5
TO
R
0
4
PDF
R
0
3
OV
R/W
x
2
Z
R/W
x
1
AC
R/W
x
0
C
R/W
x
“x”:未知
Rev. 1.10
Bit 7
SC:当 OV 与当前指令操作结果 MSB 执行“XOR”所得结果
Bit 6
CZ:不同指令不同标志位的操作结果。
对于 SUB/SUBM/LSUB/LSUBM 指令,CZ 等于 Z 标志位。
对于 SBC/SBCM/LSBC/LSBCM 指令,CZ 等于上一个 CZ 标志位与当前零标志
位执行“AND”所得结果。对于其它指令,CZ 标志位无影响。
Bit 5
TO:看门狗溢出标志位
0:系统上电或执行“CLR WDT”或“HALT”指令后
1:看门狗溢出发生
Bit 4
PDF:暂停标志位
0:系统上电或执行“CLR WDT”指令后
1:执行“HALT” 指令
Bit 3
OV:溢出标志位
0:无溢出
1:运算结果高两位的进位状态异或结果为 1
Bit 2
Z:零标志位
0:算术或逻辑运算结果不为 0
1:算术或逻辑运算结果为 0
Bit 1
AC:辅助进位标志位
0:无辅助进位
1:在加法运算中低四位产生了向高四位进位,或减法运算中低四位不发生从
高四位借位
Bit 0
C:进位标志位
0:无进位
1:如果在加法运算中结果产生了进位,或在减法运算中结果不发生借位
C 也受循环移位指令的影响。
39
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
EEPROM 数据存储器
此 单 片 机 的 一 个 特 性 是 内 建 EEPROM 数 据 存 储 器。“Electrically Erasable
Programmable Read Only Memory”为电可擦可编程只读存储器,由于其非易失
的存储结构,即使在电源掉电的情况下存储器内的数据仍然保存完好。这种存
储区扩展了 ROM 空间,对设计者来说增加了许多新的应用机会。EEPROM 可
以用来存储产品编号、校准值、用户特定数据、系统配置参数或其它产品信息
等。EEPROM 的数据读取和写入过程也会变的更简单。
EEPROM 数据存储器结构
EEPROM 数据存储器容量为 64×8。由于映射方式与程序存储器和数据存储器
不同,因此不能像其它类型的存储器一样寻址。使用 Sector 0 中的一个地址和
数据寄存器以及 Sector 1 中的一个控制寄存器,可以实现对 EEPROM 的单字节
读写操作。
EEPROM 寄存器
有三个寄存器控制内部 EEPROM 数据存储器总的操作,地址寄存器 EEA、数
据寄存器 EED 及控制寄存器 EEC。EEA 和 EED 位于 Sector 0 中,它们能像其
它特殊功能寄存器一样直接被访问。EEC 位于 Sector 1 中,不能被直接访问,
可以通过 MP1L/MP1H 和 IAR1 或 MP2L/MP2H 和 IAR2 进行间接读取或写入。
由于 EEC 控制寄存器位于 Sector 1 中的“40H”,在 EEC 寄存器上的任何操作
被执行前,MP1L 或 MP2L 必须先设为“40H”,MP1H 或 MP2H 被设为“01H”。
寄存器
名称
EEA
EED
EEC
位
7
─
D7
─
6
─
D6
─
5
D5
D5
─
4
D4
D4
─
3
D3
D3
WREN
2
D2
D2
WR
1
D1
D1
RDEN
0
D0
D0
RD
EEPROM 寄存器列表
EEA 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
D5
R/W
0
Bit 7~6
未定义,读为“0”
Bit 5~0
D5~D0:数据 EEPROM 地址
数据 EEPROM 地址 Bit 5~Bit 0
4
D4
R/W
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
4
D4
R/W
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
EED 寄存器
Bit
Name
R/W
POR
Bit 7~0
Rev. 1.10
7
D7
R/W
0
6
D6
R/W
0
5
D5
R/W
0
D7~D0:数据 EEPROM 数据
数据 EEPROM 数据 Bit 7~Bit 0
40
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
EEC 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
WREN
R/W
0
2
WR
R/W
0
1
RDEN
R/W
0
0
RD
R/W
0
Bit 7~4
未定义,读为“0”
Bit 3
WREN:数据 EEPROM 写使能位
0:除能
1:使能
此位为数据 EEPROM 写使能位,向数据 EEPROM 写操作之前需将此位置高。
将此位清零时,则禁止向数据 EEPROM 写操作。
Bit 2
WR:EEPROM 写控制位
0:写周期结束
1:写周期有效
此位为数据 EEPROM 写控制位,由应用程序将此位置高将激活写周期。写周期
结束后,硬件自动将此位清零。当 WREN 未先置高时,此位置高无效。
Bit 1
RDEN:数据 EEPROM 读使能位
0:除能
1:使能
此位为数据 EEPROM 读使能位,向数据 EEPROM 读操作之前需将此位置高。
将此位清零时,则禁止向数据 EEPROM 读操作。
Bit 0
RD:EEPROM 读控制位
0:读周期结束
1:读周期有效
此位为数据 EEPROM 读控制位,由应用程序将此位置高将激活读周期。读周期
结束后,硬件自动将此位清零。当 RDEN 未首先置高时,此位置高无效。
注:在同一条指令中 WREN、WR、RDEN 和 RD 不能同时置为“1”。WR 和 RD 不能同时
置为“1”。
从 EEPROM 中读取数据
从 EEPROM 中读取数据,EEC 寄存器中的读使能位 RDEN 先置为高以使能读
功能,EEPROM 中读取数据的地址要先放入 EEA 寄存器中。若 EEC 寄存器中
的 RD 位被置高,一个读周期将开始。若 RD 位已置为高而 RDEN 位还未被设
置则不能开始读操作。若读周期结束,RD 位将自动清除为“0”,数据可以从
EED 寄存器中读取。数据在其它读或写操作执行前将一直保留在 EED 寄存器
中。应用程序将轮询 RD 位以确定数据可以有效地被读取。
Rev. 1.10
41
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
写数据到 EEPROM
写数据至 EEPROM,EEPROM 中写入数据的地址要先放入 EEA 寄存器中。写
入的数据要存入 EED 寄存器中。写数据至 EEPROM,EEC 寄存器中的写使能
位 WREN 先置为高以使能写功能。之后将 WR 位置为高,初始化一个写周期。
这两个指令必须连续执行。在执行任何写操作之前,总中断位 EMI 要先清零,
写周期开始后,再将 EMI 置为高。需要注意的是若 WR 位已置为高而 WREN
位还未被设置则不能开始写操作。由于控制 EEPROM 写周期是一个内部时钟,
与单片机的系统时钟异步,所以数据写入 EEPROM 的时间将有所延迟。可通过
轮询 EEC 寄存器中的 WR 位或判断 EEPROM 中断以侦测写周期是否完成。若
写周期完成,WR 位将自动清除为“0”,通知用户数据已写入 EEPROM。因此,
应用程序将轮询 WR 位以确定写周期是否结束。
写保护
防止误写入的写保护有以下几种。单片机上电后控制寄存器中的写使能位将被
清除以杜绝任何写入操作。上电后存储区指针高字节寄存器 MP1H 和 MP2H 将
重置为“0”,这意味着数据存储区 Sector 0 被选中。由于 EEPROM 控制寄存
器位于 Sector 1 中,这增加了对写操作的保护措施。在正常程序操作中确保控
制寄存器中的写使能位被清除将能防止不正确的写操作。
EEPROM 写中断
EEPROM 写周期结束后将产生 EEPROM 写中断,需先通过设置相关中断寄存
器的 DEE 位使能 EEPROM 写中断。由于 EEPROM 写中断包含在多功能中断中,
相应的多功能中断使能位需被设置。当 EEPROM 写周期结束,DEF 请求标志
位及其相关多功能中断请求标志位将被置位。若 EEPROM 和多功能中断使能且
堆栈未满的情况下将跳转到相应的多功能中断向量中执行。当中断被响应,只
有多功能中断标志位将自动复位,而 EEPROM 写中断标志将通过应用程序手动
复位。更多细节将在中断章节讲述。
Rev. 1.10
42
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
编程注意事项
必须注意的是数据不会无意写入 EEPROM。在没有写动作时写使能位被正常清
零可以增强保护功能。存储器指针高字节也可以正常清零以阻止进入 EEPROM
控制寄存器存在的 Sector 1。尽管没有必要,写一个简单的读回程序以检查新写
入的数据是否正确还是应该考虑的。
写数据时,WREN 位置为“1”后,WR 须立即设置为高,以确保写周期正确地
执行。写周期执行前总中断位 EMI 应先清零,写周期开始执行后再将此位重新
使能。注意,EEPROM 读或写周期彻底完成前单片机不能进入 IDLE 或 SLEEP
模式,否则将导致 EEPROM 读或写操作失败。
程序举例
● 从 EEPROM 中读取数据 – 轮询法
MOV A,EEPROM_ADRES
MOV EEA,A
MOV A,040H
MOV MP1L,A
MOV A,01H
MOV MP1H,A
SET IAR1.1
SET IAR1.0
BACK:
SZ IAR1.0
JMP BACK
CLR IAR1
CLR MP1H
MOV A,EED
MOV READ_DATA,A
● 写数据到 EEPROM – 轮询法
MOV A,EEPROM_ADRES
MOV EEA,A
MOV A,EEPROM_DATA
MOV EED,A
MOV A,040H
MOV MP1L,A
MOV A,01H
MOV MP1H,A
CLR EMI
SET IAR1.3
SET IAR1.2
SET EMI
BACK:
SZ IAR1.2
JMP BACK
CLR IAR1
CLR MP1H
Rev. 1.10
; user defined address
; setup memory pointer low byte MP1L
; MP1L points to EEC register
; setup Memory Pointer high byte MP1H
; set RDEN bit,enable read operations
; start Read Cycle - set RD bit
; check for read cycle end
; disable EEPROM read/write
; move read data to register
; user defined address
; user defined data
; setup memory pointer low byte MP1L
; MP1L points to EEC register
; setup Memory Pointer high byte MP1H
; set WREN bit,enable write operations
; start Write Cycle - set WR bit–executed
; immediately after set WREN bit
; check for write cycle end
; disable EEPROM read/write
43
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
振荡器
不同的振荡器选择可以让使用者在不同的应用需求中实现更大范围的功能。振
荡器的灵活性使得在速度和功耗方面可以达到较佳的优化。振荡器选择及操作
是通过配置选项结合寄存器设置完成的。
振荡器概述
振荡器除了作为系统时钟源,还作为看门狗定时器和时基功能的时钟源。外部
振荡器需要一些外围器件,而集成的两个内部振荡器不需要任何外围器件。它
们提供的高速和低速系统振荡器具有较宽的频率范围。所有振荡器选择通过配
置选项选择。较高频率的振荡器提供更高的性能,但要求有更高的功率,反之
亦然。动态切换快慢系统时钟的能力使单片机具有灵活而优化的性能 / 功耗比,
此特性对功耗敏感的应用领域尤为重要。
类型
名称
外部高速晶振
内部高速 RC
外部低速晶振
内部低速 RC
HXT
HIRC
LXT
LIRC
频率
引脚
400kHz~16MHz OSC1/OSC2
4,8,12MHz
─
32.768kHz
XT1/XT2
32kHz
─
振荡器类型
系统时钟配置
该单片机有四个振荡器可被用作系统振荡器,包括两个高速振荡器和两个低速
振荡器。高速振荡器有外部晶体 / 陶瓷振荡器 HXT 和内部 4/8/12MHz 高速振荡
器 HIRC,低速振荡器有内部 32kHz 低速振荡器 LIRC 和外部 32.768kHz 晶振
LXT。使用高速或低速振荡器作为系统时钟的选择是通过设置 SCC 寄存器中的
CKS2~CKS0 位决定的,系统时钟可动态选择。
低速振荡器的实际时钟源由 SCC 寄存器的 FSS 位选择,高速振荡器的实际时钟
源由 SCC 寄存器的 FHS 位选择。低速或高速系统时钟频率由 SCC 寄存器的
CKS2~CKS0 位决定的。请注意,两个振荡器必须做出选择,即一个高速和一
个低速振荡器。
High Speed
Oscillators
HIRCEN
HXTEN
fH
FHS
fH /2
fH /4
HIRC
fH /8
IDLE0
SLEEP
fH
HXT
Prescaler
fH /32
fH /64
FSS
LXTEN
CKS2~ CKS0
LXT
LIRC
fSYS
fH /16
fLIRC
fSUB
IDLE2
SLEEP
Low Speed
Oscillators
fSUB
fLIRC
系统时钟配置
Rev. 1.10
44
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
外部晶体 / 陶瓷振荡器 – HXT
外部高频晶体 / 陶瓷振荡器是一个高频振荡器,可通过 FHS 位进行选择。对于
多数晶体振荡器,只要简单地将晶体连接至 OSC1 和 OSC2,则会产生振荡所
需的相移及反馈,而不需其它外部器件。为保证某些低频率的晶体振荡和陶瓷
谐振器的振荡频率更精准,建议连接两个小容量电容 C1 和 C2 到 VSS,具体数
值与客户选择的晶体 / 陶瓷晶振有关。
为了确保振荡器的稳定性及减少噪声和串扰的影响,晶体振荡器及其相关的电
阻和电容以及它们之间的连线都应尽可能的靠近单片机。
C1
Internal
Oscillator
Circuit
OSC1
RP
Rf
OSC2
C2
To internal
circuits
Note: 1. RP is normally not required. C1 and C2 are required.
2. Although not shown OSC1/OSC2 pins have a parasitic
capacitance of around 7pF.
晶体 / 陶瓷振荡器 – HXT
晶体振荡器 C1 和 C2 值
晶体频率
C1
16MHz
0pF
12MHz
0pF
8MHz
0pF
4MHz
0pF
1MHz
100pF
注:C1 和 C2 数值仅作参考用
C2
0pF
0pF
0pF
0pF
100pF
晶体振荡器电容推荐值
内部 RC 振荡器 – HIRC
内部 RC 振荡器是一个集成的系统振荡器,不需其它外部器件。内部 RC 振荡
器具有三种固定的频率:4MHz,8MHz,12MHz。芯片在制造时进行调整且内
部含有频率补偿电路,使得振荡频率因 VDD、温度以及芯片制成工艺不同的影
响较大程度地降低。在电源电压为 3V 或 5V 及温度为 25°C 的条件下,4MHz,
8MHz,12MHz 这三个固定频率的容差为 2%。如果选择了该内部时钟,无需使
用外部引脚。
Rev. 1.10
45
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
外部 32.768kHz 晶体振荡器 – LXT
外部 32.768kHz 晶体振荡器是一个低频振荡器,由 FSS 位进行选择。时钟频率
固定为 32.768kHz,此时 XT1 和 XT2 间引脚必须连接 32.768kHz 的晶体振荡器。
需要外部电阻和电容连接到 32.768kHz 晶振以帮助起振。对于那些要求精确频
率的场合中,可能需要这些元件来对由制程产生的误差提供频率补偿。当 LXT
振荡器通过置高 LXTEN 位被使能后,LXT 振荡器启动需要一定的延时。
当系统进入空闲 / 休眠模式,系统时钟关闭以降低功耗。然而在某些应用,比
如空闲 / 休眠模式下要保持内部定时器功能,必须提供额外的时钟,且与系统
时钟无关。
然而,对于一些晶体,为了保证系统频率的启动与精度要求,需要外接两个小
容量电容 C1 和 C2,具体数值与客户选择的晶体规格有关。外部并联的反馈电
阻 RP,是必需的。
引脚共用的软件控制位决定 XT1/XT2 脚是用于 LXT 还是作为普通 I/O 口或其
它共用功能使用。
● 若 LXT 振荡器未被用于任何时钟源,XT1/XT2 脚能被用作一般 I/O 口或其他
引脚共用功能使用。
● 若 LXT 振荡器被用于一些时钟源,32.768kHz 晶体应被连接至 XT1/XT2 脚。
为了确保振荡器的稳定性及减少噪声和串扰的影响,晶体振荡器及其相关的电
阻和电容以及它们之间的连线都应尽可能的靠近单片机。
C1
XT1
32.768
kHz
Internal
Oscillator
Circuit
Internal RC
Oscillator
RP
XT2
C2
To internal
circuits
Note: 1. RP, C1 and C2 are required.
2. Although not shown XT1/XT2 pins have a parasitic
capacitance of around 7pF.
外部 LXT 振荡器
LXT 振荡器 C1 和 C2 值
晶体频率
C1
32.768kHz
10pF
注:1、C1 和 C2 数值仅作参考用
2、RP 的建议值为 5MΩ~10MΩ
C2
10pF
32.768kHz 振荡器电容推荐值
Rev. 1.10
46
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LXT 振荡器低功耗功能
LXT 振荡器可以工作在快速启动模式或低功耗模式,可通过设置 LXTC 寄存器
中的 LXTSP 位进行模式选择。
LXTSP 位
0
1
LXT 工作模式
低功耗
快速启动
设置 LXTSP 为高,可使 LXT 振荡器工作于快速启动模式。在此模式,LXT 振
荡器将快速起振然后稳定下来。LXT 振荡器完全起振后,可以通过设置 LXTSP
位为低进入低功耗模式。振荡器可以继续运行,其间耗电将少于快速启动模式。
需要注意的是,在选择 LXT 振荡器时钟作为系统时钟源之前,必须先完成
LXT 工作模式的切换。一旦通过设置 SCC 寄存器中的 CKS2~CKS0 位和 FSS
位选择了 LXT 振荡器时钟作为系统时钟源,LXT 振荡器工作模式将不能改变。
应注意的是,无论 LXTSP 位是什么值,LXT 振荡器都会正常运作,不同的只
是在低功耗模式时需要更长的启动时间。
内部 32kHz 振荡器 – LIRC
内部 32kHz 系统振荡器是一个低频振荡器,由 FSS 位进行选择。LIRC 为一个
完全集成的 RC 振荡器,它在 5V 电压下运行的典型频率值为 32kHz 且无需外
部元件。芯片在制造时进行调整且内部含有频率补偿电路,使得振荡器因电源
电压、温度及芯片制成工艺不同的影响较大程度地降低。
辅助振荡器
低速振荡器除了提供一个系统时钟源外,也用来为看门狗定时器和时基中断提
供时钟来源。
Rev. 1.10
47
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
工作模式和系统时钟
现今的应用要求单片机具有较高的性能及尽可能低的功耗,这种矛盾的要求在
便携式电池供电的应用领域尤为明显。高性能所需要的高速时钟将增加功耗,
反之亦然。此单片机提供高、低速两种时钟源,它们之间可以动态切换,用户
可通过优化单片机操作来获得较佳性能 / 功耗比。
系统时钟
单片机为 CPU 和外围功能操作提供了多种不同的时钟源。用户使用寄存器编程
可获取多种时钟,进而使系统时钟获取较大的应用性能。
主系统时钟可来自高频时钟源 fH 或低频时钟源 fSUB,通过 SCC 寄存器中的
CKS2~CKS0 位进行选择。高频时钟来自 HXT 或 HIRC 振荡器,可通过 SCC 寄
存器中的 FHS 位选择。低频系统时钟源来自 fSUB,若 fSUB 被选择,低频时钟来
自 LXT 或 LIRC 振荡器,可通过 SCC 寄存器中的 FSS 位选择。其它系统时钟
还有高速系统振荡器的分频 fH/2~fH/64。
High Speed
Oscillators
HIRCEN
HXTEN
fH
FHS
fH /2
fH /4
HIRC
fH /8
IDLE0
SLEEP
fH
HXT
Prescaler
fH /32
fH /64
FSS
LXTEN
CKS2~ CKS0
LXT
LIRC
fSYS
fH /16
fLIRC
fSUB
IDLE2
SLEEP
fSUB
fSYS
fSYS/4
Low Speed
Oscillators
fSUB
fPSC0
Prescaler 0
Time Base 0
TB0 [2:0]
CLKSEL0[1:0]
fSYS
fSYS/4
fSUB
fPSC1
Prescaler 1
Time Base 1
TB1 [2:0]
CLKSEL1[1:0]
fLIRC
fLIRC
WDT
LVR
设备时钟配置
注:当系统时钟源 fSYS 从 fH 切换为 fSUB 时,高速振荡器可通过程序设置关闭以节省耗电,若有需要
则也可通过设置对应高速振荡器使能控制位继续开启为外围电路提供 fH~fH/64 的频率。
Rev. 1.10
48
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
系统工作模式
单片机有 6 种不同的工作模式,每种有它自身的特性,根据应用中不同的性能
和功耗要求可选择不同的工作模式。单片机正常工作有两种模式:正常模式和
低速模式。剩余的 4 种工作模式:休眠模式、空闲模式 0、空闲模式 1 和空闲
模式 2 用于单片机 CPU 关闭时以节省耗电。
寄存器设置
fSYS
fH
FHIDEN FSIDEN CKS[2:0]
On
x
x
000~110 fH~fH/64
On
(1)
On
x
x
111
fSUB On/Off
000~110
Off
Off
0
1
Off
111
On
Off
1
1
xxx
On
On
000~110
On
Off
1
0
On
111
Off
Off
0
0
xxx
Off
Off
工作模式 CPU
正常模式
低速模式
空闲模式 0
空闲模式 1
空闲模式 2
休眠模式
fSUB
fLIRC
On
On
On
On
On
On
On
On
Off
On
Off On/Off
(2)
“x”:任意值
注:1. 在低速模式中,fH 开启或关闭由对应的高速振荡器使能位控制。
2. 在休眠模式中,fLIRC 时钟开启或关闭取决于 WDT 功能的使能或除能。
正常模式
顾名思义,这是主要的工作模式之一,单片机的所有功能均可在此模式中实现
且系统时钟由一个高速振荡器提供。该模式下单片机正常工作的时钟源来自
HXT 或 HIRC 振荡器。高速振荡器频率可被分为 1~64 的不等比率,实际的比
率由 SCC 寄存器中的 CKS2~CKS0 位选择。单片机使用高速振荡器分频作为系
统时钟可减少工作电流。
低速模式
此模式的系统时钟虽来自较低速时钟源,但单片机仍能正常工作。该低速时钟
源来自 fSUB,而 fSUB 可来自于 LXT 或 LIRC 振荡器。
休眠模式
执行 HALT 指令后且 SCC 寄存器中的 FHIDEN 和 FSIDEN 位都为 0 时,系统
进入休眠模式。在休眠模式中,CPU 停止运行,fSUB 时钟也将停止。WDT 功能
可通过应用程序设置为关闭或开启。
空闲模式 0
执行 HALT 指令后且 SCC 寄存器中的 FHIDEN 位为低、FSIDEN 位为高时,系
统进入空闲模式 0。在空闲模式 0 中,CPU 停止,但低速振荡器会开启以驱动
一些外围功能。
空闲模式 1
执行 HALT 指令后且 SCC 寄存器中的 FHIDEN 和 FSIDEN 位都为高时,系统
进入空闲模式 1。在空闲模式 1 中,CPU 停止,但高速和低速振荡器都会开启
以保持一些外围功能继续工作。
Rev. 1.10
49
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
空闲模式 2
执行 HALT 指令后且 SCC 寄存器中的 FHIDEN 位为高、FSIDEN 位为低时,系
统进入空闲模式 2。在空闲模式 2 中,CPU 停止,但高速振荡器会开启以保持
一些外围功能继续工作。
控制寄存器
寄存器 SCC、HIRCC、HXTC 和 LXTC 用于控制系统时钟和对应的振荡器配置。
寄存器
名称
SCC
HIRCC
HXTC
LXTC
位
7
CKS2
─
─
─
6
CKS1
─
─
─
5
CKS0
─
─
─
4
─
─
─
─
3
FHS
HIRC1
─
─
2
1
0
FSS
FHIDEN FSIDEN
HIRC0 HIRCF HIRCEN
HXTM HXTF HXTEN
LXTSP LXTF
LXTEN
系统工作模式控制寄存器列表
SCC 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
CKS2
R/W
0
6
CKS1
R/W
0
5
CKS0
R/W
0
4
─
─
─
3
FHS
R/W
0
2
FSS
R/W
0
1
0
FHIDEN FSIDEN
R/W
R/W
0
0
Bit 7~5
CKS2~CKS0:系统时钟选择
000:fH
001:fH/2
010:fH/4
011:fH/8
100:fH/16
101:fH/32
110:fH/64
111:fSUB
这三位用于选择系统时钟源。除了 fH 或 fSUB 提供的系统时钟源外,也可使用高
频振荡器的分频作为系统时钟。
Bit 4
未定义,读为“0”
Bit 3
FHS:高频时钟选择
0:HIRC
1:HXT
Bit 2
FSS:低频时钟选择
0:LIRC
1:LXT
Bit 1
FHIDEN:CPU 关闭时高速振荡器控制
0:除能
1:使能
此位用来控制在执行 HALT 指令 CPU 关闭后,高速振荡器是否停止。
50
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 0
FSIDEN:CPU 关闭时低速振荡器控制
0:除能
1:使能
此位用来控制在执行 HALT 指令 CPU 关闭后,低速振荡器是否停止。若选择
LIRC 作为低频时钟源,则 LIRC 振荡器关闭与否是由该位与 WDT 功能使能控
制位共同决定的。设置此位为高或使能 WDT 功能都将使 LIRC 振荡器继续工作。
即使设置此位为零但 WDT 功能使能,LIRC 也将保持运行以提供 WDT 时钟。
HIRCC 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
HIRC1
R/W
0
2
HIRC0
R/W
0
1
0
HIRCF HIRCEN
R
R/W
0
1
Bit 7~4
未定义,读为“0”
Bit 3~2
HIRC1~HIRC0:HIRC 频率选择
00:4MHz
01:8MHz
10:12MHz
11:4MHz
当 HIRC 振荡器使能或通过应用程序改变 HIRC 频率选择位时,时钟频率会在
HIRCF 标志位置高后自动改变。
Bit 1
HIRCF:HIRC 振荡器稳定标志位
0:HIRC 未稳定
1:HIRC 稳定
此位用于表明 HIRC 振荡器是否稳定。HIRCEN 位置高使能 HIRC 振荡器,或者
通过应用程序改变 HIRC 频率选择位时,HIRCF 位会先被清零,在 HIRC 稳定
后会被置高。
Bit 0
HIRCEN:HIRC 振荡器使能控制
0:除能
1:使能
HXTC 寄存器
Bit
Name
R/W
POR
Bit 7~3
Bit 2
Bit 1
Bit 0
Rev. 1.10
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
─
─
─
2
HXTM
R/W
0
1
HXTF
R
0
0
HXTEN
R/W
0
未定义,读为“0”
HXTM:HXT 模式选择
0:HXT 频率 ≤10MHz
1:HXT 频率 >10MHz
此位用于选择 HXT 振荡器的工作模式。注意,此位必须在 HXT 使能前正确地
配置,在 HXTEN 位置高使能 HXT 振荡器后改变此位的值将无效。
HXTF:HXT 振荡器稳定标志位
0:HXT 不稳定
1:HXT 稳定
此 位 用 于 表 明 HXT 振 荡 器 是 否 稳 定。HXTEN 位 置 高 使 能 HXT 振 荡 器 后,
HXTF 位会先被清零,在 HXT 稳定后会被置高。
HXTEN:HXT 振荡器使能控制
0:除能
1:使能
51
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LXTC 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
─
─
─
2
LXTSP
R/W
0
1
LXTF
R
0
0
LXTEN
R/W
0
Bit 7~3
未定义,读为“0”
Bit 2
LXTSP:LXT 振荡器快速启动控制
0:除能 – 低功耗模式
1:使能 – 快速启动模式
此位用来控制 LXT 振荡器工作在低功耗模式或快速启动模式。当 LXTSP 位被
置高,LXT 振荡器的振荡加快,但功耗增加。如果 LXTSP 位被清零,LXT 振
荡器功耗将减少,但需要较长的启动稳定时间。需要注意的是,通过设置 SCC
寄存器中的 CKS2~CKS0 位和 FSS 位选择 LXT 振荡器作为系统时钟源后,该位
不能改变。
Bit 1
LXTF:LXT 振荡器稳定标志位
0:LXT 不稳定
1:LXT 稳定
此 位 用 于 表 明 LXT 振 荡 器 是 否 稳 定。LXTEN 位 置 高 使 能 LXT 振 荡 器 后,
LXTF 位会先被清零,在 LXT 稳定后会被置高。
Bit 0
LXTEN:LXT 振荡器使能控制
0:除能
1:使能
52
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
工作模式切换
单片机可在各个工作模式间自由切换,使得用户可根据所需选择较佳的性能 /
功耗比。用此方式,对单片机工作的性能要求不高的情况下,可使用较低频时
钟以减少工作电流,在便携式应用上延长电池的使用寿命。
简 单 来 说, 正 常 模 式 和 低 速 模 式 间 的 切 换 仅 需 设 置 SCC 寄 存 器 中 的
CKS2~CKS0 位即可实现,而正常模式 / 低速模式与休眠模式 / 空闲模式间的切
换经由 HALT 指令实现。当 HALT 指令执行后,单片机是否进入空闲模式或休
眠模式由 SCC 寄存器中的 FHIDEN 和 FSIDEN 位决定的。
NORMAL
fSYS=fH~fH/64
fH on
CPU run
fSYS on
fSUB on
SLOW
fSYS=fSUB
fSUB on
CPU run
fSYS on
fH on/off
SLEEP
HALT instruction executed
CPU stop
FHIDEN=0
FSIDEN=0
fH off
fSUB off
IDLE0
HALT instruction executed
CPU stop
FHIDEN=0
FSIDEN=1
fH off
fSUB on
IDLE2
HALT instruction executed
CPU stop
FHIDEN=1
FSIDEN=0
fH on
fSUB off
Rev. 1.10
53
IDLE1
HALT instruction executed
CPU stop
FHIDEN=1
FSIDEN=1
fH on
fSUB on
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
正常模式切换到低速模式
系统运行在正常模式时使用高速系统振荡器,因此较为耗电。可通过设置 SCC
寄存器中的 CKS2~CKS0 位为“111”使系统时钟切换至运行在低速模式下。此
时将使用低速系统振荡器以节省耗电。用户可在对性能要求不高的操作中使用
此方法以减少耗电。
低速模式的时钟源来自 LXT 或 LIRC 振荡器,由 SCC 寄存器中的 FSS 位确定,
因此要求这些振荡器在所有模式切换动作发生前稳定下来。
NORMAL Mode
CKS2~CKS0 = 111
SLOW Mode
FHIDEN=0, FSIDEN=0
HALT instruction is executed
SLEEP Mode
FHIDEN=0, FSIDEN=1
HALT instruction is executed
IDLE0 Mode
FHIDEN=1, FSIDEN=1
HALT instruction is executed
IDLE1 Mode
FHIDEN=1, FSIDEN=0
HALT instruction is executed
IDLE2 Mode
Rev. 1.10
54
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
低速模式切换到正常模式
在低速模式时系统时钟来自 fSUB。切换回正常模式时,需设置 CKS2~CKS0 位
为“000”~“110”使系统时钟从 fSUB 切换到 fH ~ fH/64。
然而,如果在低速模式下 fH 因未使用而关闭,那么从低速模式切换到正常模式
时,它需要一定的时间来重新起振和稳定,可通过检测 HXTC 寄存器中的
HXTF 位或 HIRCC 寄存器中的 HIRCF 位进行判断,高速振荡器稳定时间具体
值可参考交流电气特性表。
SLOW Mode
CKS2~CKS0 = 000~110
NORMAL Mode
FHIDEN=0, FSIDEN=0
HALT instruction is executed
SLEEP Mode
FHIDEN=0, FSIDEN=1
HALT instruction is executed
IDLE0 Mode
FHIDEN=1, FSIDEN=1
HALT instruction is executed
IDLE1 Mode
FHIDEN=1, FSIDEN=0
HALT instruction is executed
IDLE2 Mode
Rev. 1.10
55
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
进入休眠模式
进入休眠模式的方法仅有一种——应用程序中执行“HALT”指令前需设置
SCC 寄存器中的 FHIDEN 和 FSIDEN 位都为“0”。在上述条件下执行该指令后,
将发生的情况如下:
● 系统时钟停止运行,应用程序停止在“HALT”指令处。
● 数据存储器中的内容和寄存器将保持当前值。
● 输入 / 输出口将保持当前值。
● 状态寄存器中暂停标志 PDF 将被置起,看门狗溢出标志 TO 将被清除。
● 若 WDT 功能使能,WDT 将被清零并重新开始计数。若 WDT 功能除能,
WDT 将被清零并停止。
进入空闲模式 0
进入空闲模式 0 的方法仅有一种——应用程序中执行“HALT”指令前需设置
SCC 寄存器中的 FHIDEN 位为“0”且 FSIDEN 位为“1”。在上述条件下执行
该指令后,将发生的情况如下:
● fH 时钟停止运行,应用程序停止在“HALT”指令处,但 fSUB 时钟将继续运行。
● 数据存储器中的内容和寄存器将保持当前值。
● 输入 / 输出口将保持当前值。
● 状态寄存器中暂停标志 PDF 将被置起,看门狗溢出标志 TO 将被清除。
● 若 WDT 功能使能,WDT 将被清零并重新开始计数。若 WDT 功能除能,
WDT 将被清零并停止。
进入空闲模式 1
进入空闲模式 1 的方法仅有一种——应用程序中执行“HALT”指令前需设置
SCC 寄存器中的 FHIDEN 和 FSIDEN 位都为“1”。在上述条件下执行该指令后,
将发生的情况如下:
● fH 和 fSUB 时钟开启,应用程序停止在“HALT”指令处。
● 数据存储器中的内容和寄存器将保持当前值。
● 输入 / 输出口将保持当前值。
● 状态寄存器中暂停标志 PDF 将被置起,看门狗溢出标志 TO 将被清除。
● 若 WDT 功能使能,WDT 将被清零并重新开始计数。若 WDT 功能除能,
WDT 将被清零并停止。
进入空闲模式 2
进入空闲模式 2 的方法仅有一种——应用程序中执行“HALT”指令前需设置
SCC 寄存器中的 FHIDEN 位为“1”且 FSIDEN 位为“0”。在上述条件下执行
该指令后,将发生的情况如下:
● fH 时钟开启,fSUB 时钟关闭,应用程序停止在“HALT”指令处。
● 数据存储器中的内容和寄存器将保持当前值。
● 输入 / 输出口将保持当前值。
● 状态寄存器中暂停标志 PDF 将被置起,看门狗溢出标志 TO 将被清除。
● 若 WDT 功能使能,WDT 将被清零并重新开始计数。若 WDT 功能除能,
WDT 将被清零并停止。
Rev. 1.10
56
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
待机电流注意事项
由于单片机进入休眠或空闲模式的主要原因是将 MCU 的电流降低到尽可能低,
可能到只有几个微安的级别(空闲模式 1 和空闲模式 2 除外),所以如果要将
电路的电流进一步降低,电路设计者还应有其它的考虑。应该特别注意的是单
片机的输入 / 输出引脚。所有高阻抗输入脚都必须连接到固定的高或低电平,
因为引脚浮空会造成内部振荡并导致耗电增加。这也应用于有不同封装的单片
机,因为它们可能含有未引出的引脚,这些引脚也必须设为输出或带有上拉电
阻的输入。
另外还需注意单片机设为输出的 I/O 引脚上的负载。应将它们设置在有最小拉
电流的状态或将它们和其它的 CMOS 输入一样接到没有拉电流的外部电路上。
还应注意的是,如果选择 LIRC 或 LXT 振荡器,会导致耗电增加。
在空闲模式 1 和空闲模式 2 中,高速振荡器开启。若外围功能时钟源来自高速
振荡器,额外的待机电流也可能会有几百微安。
唤醒
单片机进入休眠模式或空闲模式后,系统时钟将停止以降低功耗。然而单片机
再次唤醒,原来的系统时钟重新起振、稳定且恢复正常工作需要一定的时间。
系统进入休眠或空闲模式之后,可以通过以下几种方式唤醒:
● PA 口下降沿
● 系统中断
● WDT 溢出
单片机执行 HALT 指令,PDF 将被置位;系统上电或执行清除看门狗的指令,
PDF 将被清零。看门狗计数器溢出将会置位 TO 标志并唤醒系统,这种复位会
重置程序计数器和堆栈指针,其它标志保持原有状态。
PA 口中的每个引脚都可以通过 PAWU 寄存器使能下降沿唤醒功能。PA 端口唤
醒后,程序将在“HALT”指令后继续执行。如果系统是通过中断唤醒,则有两
种可能发生。第一种情况是:相关中断除能或是中断使能且堆栈已满,则程序
会在“HALT”指令之后继续执行。这种情况下,唤醒系统的中断会等到相关中
断使能或有堆栈层可以使用之后才执行。第二种情况是:相关中断使能且堆栈
未满,则中断可以马上执行。如果在进入休眠或空闲模式之前中断标志位已经
被设置为“1”,则相关中断的唤醒功能将无效。
编程注意事项
HXT 和 LXT 振荡器使用不同的 SST 计数器。例如,若系统从休眠模式中唤醒,
HXT 和 LXT 振荡器都需从关闭状态中启动。
● 若单片机从休眠模式唤醒后进入正常模式,高速系统振荡器需要一个 SST 周
期。在 HIRCF 或 HXTF 为“1”后,单片机开始执行首条指令。同时若 fSUB
时钟来自 LXT 振荡器,LXT 振荡器可能还未稳定。上电时也可能会发生类似
情况即第一条指令执行的时候,LXT 振荡器还没有稳定。
● 一些外围功能,如 TM,若使用系统时钟 fSYS,在系统时钟源由 fH 切换至 fSUB
时,这些功能的时钟源也会随之改变。
Rev. 1.10
57
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
看门狗定时器
看门狗定时器的功能在于防止如电磁的干扰等外部不可控制事件,所造成的程
序不正常动作或跳转到未知的地址。
看门狗定时器时钟源
WDT 定时器时钟源由内部低速振荡器 LIRC 提供。内部振荡器 LIRC 的频率大
约为 32kHz,这个特殊的内部时钟周期会随 VDD、温度和制成的不同而变化。
看门狗定时器的时钟源可分频为 28~218 以提供更大的溢出周期,分频比由
WDTC 寄存器中的 WS2~WS0 位来决定。
看门狗定时器控制寄存器
WDTC 寄存器用于控制 WDT 功能的整个操作如使能 / 除能及复位控制,选择
WDT 溢出周期。
WDTC 寄存器
Bit
Name
R/W
POR
7
WE4
R/W
0
6
WE3
R/W
1
5
WE2
R/W
0
4
WE1
R/W
1
3
WE0
R/W
0
2
WS2
R/W
0
1
WS1
R/W
1
0
WS0
R/W
1
Bit 7~3
WE4~WE0:WDT 功能控制
10101:除能
01010:使能
其它值:单片机复位
如果由于不利的环境因素使这些位变为其它值,单片机将复位。复位动作发生
在 tSRESET 延迟时间后,且 RSTFC 寄存器的 WRF 位将置为“1”。
Bit 2~0
WS2~WS0:WDT 溢出周期选择位
000:28/fLIRC
001:210/fLIRC
010:212/fLIRC
011:214/fLIRC
100:215/fLIRC
101:216/fLIRC
110:217/fLIRC
111:218/fLIRC
这三位控制 WDT 时钟源的分频比,从而实现对 WDT 溢出周期的控制。
RSTFC 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
RSTF
R/W
0
2
LVRF
R/W
x
1
LRF
R/W
0
0
WRF
R/W
0
“x”:未知
Rev. 1.10
Bit 7~4
未定义,读为“0”
Bit 3
RSTF:复位控制寄存器软件复位标志位
具体描述见其它章节
Bit 2
LVRF:LVR 复位标志位
具体描述见其它章节
58
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 1
LRF:LVRC 寄存器软件复位标志位
具体描述见其它章节
Bit 0
WRF:WDTC 寄存器软件复位标志位
0:未发生
1:发生
当 WDT 控制寄存器软件复位发生时,此位被置为“1”,且只能通过应用程序
清零。
看门狗定时器操作
当 WDT 溢出时,它产生一个单片机复位的动作。这也就意味着正常工作期间,
用户需在应用程序中看门狗溢出前有策略地清看门狗定时器以防止其产生复
位,可使用清除看门狗指令实现。无论什么原因,程序失常跳转到一个未知的
地址或进入一个死循环,这些清除指令都不能被正确执行,此种情况下,看门
狗将溢出以使单片机复位。看门狗定时器控制寄存器 WDTC 中的 WE4~WE0
位可提供使能 / 除能控制以及控制看门狗定时器复位操作。当 WE4~WE0 设置
为“10101B”时除能 WDT 功能,而当设置为“01010B”时使能 WDT 功能。
如果 WE4~WE0 设置为除“01010B”和“10101B”以外的值时,单片机将在
tSRESET 延迟时间后复位。上电后这些位初始化为“01010B”。
WE4~WE0 位
10101B
01010B
其它值
WDT 功能
除能
使能
单片机复位
看门狗定时器使能 / 除能控制
程序正常运行时,WDT 溢出将导致单片机复位,并置位状态标志位 TO。若系
统处于休眠或空闲模式,当 WDT 发生溢出时,状态寄存器中的 TO 应置位,
仅 PC 和堆栈指针复位。有三种方法可以用来清除 WDT 的内容。第一种是
WDT 复位,即将 WE4~WE0 位设置成除了 01010B 和 10101B 外的任意值;第
二种是通过软件清除指令,而第三种是通过“HALT”指令。
该 单 片 机 只 使 用 一 条 清 看 门 狗 指 令“CLR WDT”。 因 此 只 要 执 行“CLR
WDT”便清除 WDT。
当设置分频比为 218 时,溢出周期最大。例如,时钟源为 32kHz LIRC 振荡器,
分频比为 218 时最大溢出周期约 8s,分频比为 28 时最小溢出周期约 8ms。
WDTC
Register
Reset MCU
WE4~WE 0 bits
CLR
“ HALT” Instruction
“ CLR WDT” Instruction
LIRC
fLIRC
8-stage Divider
fLIRC/28
WS2~WS0
8
18
(fLIRC/2 ~ f LIRC/2 )
WDT Prescaler
8-to- 1 MUX
WDT Time-out
8
18
(2 /fLIRC ~ 2 /fLIRC)
看门狗定时器
Rev. 1.10
59
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
复位和初始化
复位功能是任何单片机中基本的部分,使得单片机可以设定一些与外部参数无
关的先置条件。最重要的复位条件是在单片机首次上电以后,经过短暂的延迟,
内部硬件电路使得单片机处于预期的稳定状态并开始执行第一条程序指令。上
电复位以后,在程序执行之前,部分重要的内部寄存器将会被设定为预先设定
的状态。程序计数器就是其中之一,它会被清除为零,使得单片机从最低的程
序存储器地址开始执行程序。
另一种复位为看门狗溢出单片机复位。不同方式的复位操作会对寄存器产生不
同的影响。另一种复位为低电压复位即 LVR 复位,在电源供应电压低于 LVR
设定值时,系统会产生 LVR 复位。
复位功能
单片机的几种复位方式将在此处做具体介绍。
上电复位
这是最基本且不可避免的复位,发生在单片机上电后。除了保证程序存储器从
开始地址执行,上电复位也使得其它寄存器被设定在预设条件。所有的输入 /
输出端口控制寄存器在上电复位时会保持高电平,以确保上电后所有引脚被设
定为输入状态。
VDD
Power-on Reset
tRSTD
SST Time-out
注:tRSTD 为上电延迟时间,典型值为 50ms。
上电复位时序图
内部复位控制
内部复位控制寄存器 RSTC 用于为单片机在受到环境噪声干扰而异常工作时提
供复位。如果 RSTC 寄存器的内容被设置为除 01010101B 或 10101010B 以外的
其它任何值,单片机会在 tSRESET 延迟时间后发生复位。上电后寄存器的值为
01010101B。
RSTC7~RSTC0 位
01010101B
10101010B
其它值
复位功能
无操作
无操作
单片机复位
内部复位功能控制
Rev. 1.10
60
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● RSTC 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
RSTC7
R/W
0
6
RSTC6
R/W
1
5
RSTC5
R/W
0
4
RSTC4
R/W
1
3
RSTC3
R/W
0
2
RSTC2
R/W
1
1
RSTC1
R/W
0
0
RSTC0
R/W
1
RSTC7~RSTC0:复位功能控制位
01010101:无操作
10101010:无操作
其它值:MCU 复位
如果由于不利的环境因素使这些位发生改变,单片机将复位。复位动作发生在
tSRESET 延迟时间后,且 RSTFC 寄存器的 RSTF 位将置为“1”。
● RSTFC 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
RSTF
R/W
0
2
LVRF
R/W
x
1
LRF
R/W
0
0
WRF
R/W
0
“x”:未知
Bit 7~4
Bit 3
Bit 2
Bit 1
Bit 0
未定义,读为“0”
RSTF:复位控制寄存器软件复位标志位
0:未发生
1:发生
当 RSTC 控制寄存器软件复位发生时,此位被置为“1”,且只能通过应用程序
清零。
LVRF:LVR 复位标志位
具体描述见其它章节
LRF:LVRC 寄存器软件复位标志位
具体描述见其它章节
WRF:WDTC 寄存器软件复位标志位
具体描述见其它章节
低电压复位 – LVR
单片机具有低电压复位电路,用来监测它的电源电压。若 LVR 功能使能将会同
时设定一个电源复位低电压,VLVR。当单片机供应的电压下降到 0.9V~VLVR 之
间,比如在更换电池的情况下,这时 LVR 将会自动复位单片机且置位 RSTFC
寄存器中的 LVRF 标志位。
LVR 包含以下的规格:有效的 LVR 信号,即在 0.9V~VLVR 的低电压状态的保持
时间,必须超过 LVD & LVR 电气特性中 tLVR 参数的值。如果低电压存在时间不
超过 tLVR 参数的值,则 LVR 将会忽略此次低电压,不执行复位功能。实际的
VLVR 参数值可通过 LVRC 寄存器中的 LVS7~LVS0 位进行选择。若因环境噪声
或软件设置修改了 LVRC 寄存器的值,将在 tSRESET 时间后复位单片机。同时
RSTFC 寄 存 器 LRF 位 将 被 置“1”。 上 电 复 位 后 LVRC 的 初 始 值 是
01100110B。注意当单片机进入空闲或休眠模式,LVR 功能将自动关闭。
LVR
tRSTD + tSST
Internal Reset
注:tRSTD 为上电延迟时间,典型值为 50ms。
低电压复位时序图
Rev. 1.10
61
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● LVRC 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
LVS7
R/W
0
6
LVS6
R/W
1
5
LVS5
R/W
1
4
LVS4
R/W
0
3
LVS3
R/W
0
2
LVS2
R/W
1
1
LVS1
R/W
1
0
LVS0
R/W
0
LVS7~LVS0:LVR 电压选择位
01100110:1.7V
01010101:1.9V
00110011:2.55V
10011001:3.15V
10101010:3.8V
11110000:LVR 除能
其它值:单片机复位(LVRC 恢复到上电复位值)
当上述定义的相应的低电压出现,且低电压保持时间超过 tLVR 值,之后将会产
生单片机复位。单片机复位后寄存器中的值与复位前保持不变。
若将 LVRC 寄存器定义为其它值,将会产生单片机复位。复位操作会在 tSRESET
时间后执行。注意的是此处单片机复位后,寄存器的值将恢复到上电复位值。
● RSTFC 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
RSTF
R/W
0
2
LVRF
R/W
x
1
LRF
R/W
0
0
WRF
R/W
0
“x”:未知
Bit 7~4
未定义,读为“0”
Bit 3
RSTF:复位控制寄存器软件复位标志位
具体描述见其它章节
Bit 2
LVRF:LVR 复位标志位
0:未发生
1:发生
当特定的低电压复位条件发生时,该位被置为“1”。只能通过应用程序清零。
Bit 1
LRF:LVRC 寄存器软件复位标志位
0:未发生
1:发生
如果 LVRC 寄存器被修改为任何非定义的 LVR 电压值,将会产生单片机复位,
同时该位被置为“1”,这类似于软件复位功能。只能通过应用程序清零。
Bit 0
WRF:WDTC 寄存器软件复位标志位
具体描述见其它章节
正常运行时看门狗溢出复位
除了看门狗溢出标志位 TO 将被设为“1”之外,正常运行时看门狗溢出复位和
LVR 复位相同。
WDT Time-out
tRSTD + tSST
Internal Reset
注:tRSTD 为上电延迟时间,典型值为 16.7ms。
正常运行时看门狗溢出时序图
Rev. 1.10
62
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
休眠或空闲时看门狗溢出复位
休眠或空闲时看门狗溢出复位和其它种类的复位有些不同。除了程序计数器与
堆栈指针将被清“0”及 TO 位被设为“1”外,绝大部分的条件保持不变。图
中 tSST 的详细说明请参考交流电气特性。
WDT Time-out
tSST
Internal Reset
休眠或空闲时看门狗溢出复位时序图
复位初始状态
不同的复位形式以不同的途径影响复位标志位。这些标志位,即 PDF 和 TO 位
存放在状态寄存器中,由休眠或空闲模式功能或看门狗计数器等几种控制器操
作控制。复位标志位如下所示:
TO
0
u
1
1
PDF
0
u
u
1
复位条件
上电复位
正常模式或低速模式时的 LVR 复位
正常模式或低速模式时的 WDT 溢出复位
空闲或休眠模式时的 WDT 溢出复位
“u”代表不改变
在单片机上电复位之后,各功能单元初始化的情形,列于下表。
项目
程序计数器
中断
看门狗定时器
定时 / 计数器
输入 / 输出口
堆栈指针
复位后情况
清除为零
所有中断被除能
WDT 清除并重新计数
所有定时模块 / 计数器停止
I/O 口设为输入模式
堆栈指针指向堆栈顶端
不同的复位形式对单片机内部寄存器的影响是不同的。为保证复位后程序能正
常执行,了解寄存器在特定条件复位后的设置是非常重要的。下表即为不同方
式复位后内部寄存器的状况。若芯片有多种封装类型,表格反映较大的封装的
情况。
寄存器
程序计数器
IAR0
MP0
IAR1
MP1L
MP1H
ACC
PCL
TBLP
Rev. 1.10
上电复位
LVR 复位
WDT 溢出
( 正常运行 )
WDT 溢出
( 空闲或休眠 )
0000H
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
xxxx xxxx
0000 0000
xxxx xxxx
0000H
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
uuuu uuuu
0000 0000
uuuu uuuu
0000H
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
uuuu uuuu
0000 0000
uuuu uuuu
0000H
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
0000 0000
uuuu uuuu
63
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
寄存器
TBLH
TBHP
STATUS
IAR2
MP2L
MP2H
RSTFC
INTC0
INTC1
INTC2
PA
PAC
PAPU
PAWU
PB
PBC
PBPU
PC
PCC
PCPU
PD
PDC
PDPU
PE
PEC
PEPU
PF
PFC
PFPU
RSTC
VBGRC
MFI0
MFI1
MFI2
INTEG
SCC
HIRCC
HXTC
LXTC
WDTC
Rev. 1.10
上电复位
LVR 复位
WDT 溢出
( 正常运行 )
WDT 溢出
( 空闲或休眠 )
xxxx xxxx
---x xxxx
xx00 xxxx
0000 0000
0000 0000
0000 0000
---- 0x00
-000 0000
0000 0000
0000 0000
1111 1111
1111 1111
0000 0000
0000 0000
1111 1111
1111 1111
0000 0000
1111 1111
1111 1111
0000 0000
- 111 1111
- 111 1111
-000 0000
- - - 1 1111
- - - 1 1111
---0 0000
1111 1111
1111 1111
0000 0000
0101 0101
---- ---0
--00 --00
0000 0000
--00 --00
---- 0000
000- 0000
---- 0001
---- -000
---- -000
0101 0011
uuuu uuuu
---u uuuu
uuuu uuuu
0000 0000
0000 0000
0000 0000
---- u1uu
-000 0000
0000 0000
0000 0000
1111 1111
1111 1111
0000 0000
0000 0000
1111 1111
1111 1111
0000 0000
1111 1111
1111 1111
0000 0000
- 111 1111
- 111 1111
-000 0000
- - - 1 1111
- - - 1 1111
---0 0000
1111 1111
1111 1111
0000 0000
0101 0101
---- ---0
--00 --00
0000 0000
--00 --00
---- 0000
000- 0000
---- 0001
---- -000
---- -000
0101 0011
uuuu uuuu
---u uuuu
xx1u uuuu
0000 0000
0000 0000
0000 0000
---- uuuu
-000 0000
0000 0000
0000 0000
1111 1111
1111 1111
0000 0000
0000 0000
1111 1111
1111 1111
0000 0000
1111 1111
1111 1111
0000 0000
- 111 1111
- 111 1111
-000 0000
- - - 1 1111
- - - 1 1111
---0 0000
1111 1111
1111 1111
0000 0000
0101 0101
---- ---0
--00 --00
0000 0000
--00 --00
---- 0000
000- 0000
---- 0001
---- -000
---- -000
0101 0011
uuuu uuuu
---u uuuu
uu11 uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
---- uuuu
-uuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
-uuu uuuu
-uuu uuuu
-uuu uuuu
---u uuuu
---u uuuu
---u uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
---- ---u
--uu --uu
uuuu uuuu
--uu --uu
---- uuuu
uuu- uuuu
---- uuuu
---- -uuu
---- -uuu
uuuu uuuu
64
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
寄存器
LVRC
LVDC
LVPUC
CMPC
CMPVOS
CTMC0
CTMC1
CTMDL
CTMDH
CTMAL
CTMAH
CTMRP
EEA
EED
PTMC0
PTMC1
PTMDL
PTMDH
PTMAL
PTMAH
PTMRPL
PTMRPH
STMC0
STMC1
STMDL
STMDH
STMAL
STMAH
STMRP
SLEDC0
SLEDC1
SLEDC2
TB0C
TB1C
PSC0R
PSC1R
SADOL
(ADRFS=0)
SADOL
(ADRFS=1)
Rev. 1.10
上电复位
LVR 复位
WDT 溢出
( 正常运行 )
WDT 溢出
( 空闲或休眠 )
0110 0110
--00 0000
---- ---0
-000 00--001 0000
0000 0--0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
--00 0000
0000 0000
0000 0--0000 0000
0000 0000
---- --00
0000 0000
---- --00
0000 0000
---- --00
0000 0--0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0--- -000
0--- -000
---- --00
---- --00
0110 0110
--00 0000
---- ---0
-000 00--001 0000
0000 0--0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
--00 0000
0000 0000
0000 0--0000 0000
0000 0000
---- --00
0000 0000
---- --00
0000 0000
---- --00
0000 0--0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0--- -000
0--- -000
---- --00
---- --00
0110 0110
--00 0000
---- ---0
-000 00--001 0000
0000 0--0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
--00 0000
0000 0000
0000 0--0000 0000
0000 0000
---- --00
0000 0000
---- --00
0000 0000
---- --00
0000 0--0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0--- -000
0--- -000
---- --00
---- --00
uuuu uuuu
--uu uuuu
---- ---u
-uuu uu--uuu uuuu
uuuu u--uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
--uu uuuu
uuuu uuuu
uuuu u--uuuu uuuu
uuuu uuuu
---- --uu
uuuu uuuu
---- --uu
uuuu uuuu
---- --uu
uuuu u--uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
u--- -uuu
u--- -uuu
---- --uu
---- --uu
xxxx ----
xxxx ----
xxxx ----
uuuu ----
xxxx xxxx
xxxx xxxx
xxxx xxxx
uuuu uuuu
65
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
寄存器
SADOH
(ADRFS=0)
SADOH
(ADRFS=1)
SADC0
SADC1
SADC2
SIMC0
SIMC1
SIMD
SIMA/
SIMC2
SIMTOC
SCOMC
USR
UCR1
UCR2
TXR_RXR
BRG
IFS0
IFS1
PAS0
PAS1
PBS0
PBS1
PCS0
PCS1
PDS0
PDS1
PES0
PES1
PFS0
PFS1
EEC
上电复位
LVR 复位
WDT 溢出
( 正常运行 )
WDT 溢出
( 空闲或休眠 )
xxxx xxxx
xxxx xxxx
xxxx xxxx
uuuu uuuu
---- xxxx
---- xxxx
---- xxxx
---- uuuu
0000 0000
0000 -000
0--0 0000
111- 0000
1000 0001
xxxx xxxx
0000 0000
0000 -000
0--0 0000
111- 0000
1000 0001
xxxx xxxx
0000 0000
0000 -000
0--0 0000
111- 0000
1000 0001
xxxx xxxx
uuuu uuuu
uuuu -uuu
u--u uuuu
uuu- uuuu
uuuu uuuu
uuuu uuuu
0000 0000
0000 0000
0000 0000
uuuu uuuu
0000 0000
-000 ---0000 1011
0000 00x0
0000 0000
xxxx xxxx
xxxx xxxx
0000 0000
---- --00
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
--00 0000
0000 0000
---- --00
0000 0000
0000 0000
---- 0000
0000 0000
-000 ---0000 1011
0000 00x0
0000 0000
xxxx xxxx
xxxx xxxx
0000 0000
---- --00
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
--00 0000
0000 0000
---- --00
0000 0000
0000 0000
---- 0000
0000 0000
-000 ---0000 1011
0000 00x0
0000 0000
xxxx xxxx
xxxx xxxx
0000 0000
---- --00
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
0000 0000
--00 0000
0000 0000
---- --00
0000 0000
0000 0000
---- 0000
uuuu uuuu
-uuu ---uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
---- --uu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
uuuu uuuu
--uu uuuu
uuuu uuuu
---- --uu
uuuu uuuu
uuuu uuuu
---- uuuu
注:“u”表示不改变
“x”表示未知
“-”表示未定义
Rev. 1.10
66
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
输入 / 输出端口
盛群单片机的输入 / 输出口控制具有很大的灵活性。大部分引脚可在用户程序
控制下被设定为输入或输出。所有引脚的上拉电阻设置以及指定引脚的唤醒设
置也都由软件控制,这些特性也使得此类单片机在广泛应用上都能符合开发的
需求。
此单片机提供 PA~PF 双向输入 / 输出口。这些寄存器在数据存储器有特定的地
址。所有 I/O 口用于输入输出操作。作为输入操作,输入引脚无锁存功能,也就
是说输入数据必须在执行“MOV A,[m]”,T2 的上升沿准备好,m 为端口地址。
对于输出操作,所有数据都是被锁存的,且保持不变直到输出锁存被重写。
寄存器
名称
PA
PAC
PAPU
PAWU
PB
PBC
PBPU
PC
PCC
PCPU
PD
PDC
PDPU
PE
PEC
PEPU
PF
PFC
PFPU
LVPUC
位
7
PA7
PAC7
PAPU7
PAWU7
PB7
PBC7
PBPU7
PC7
PCC7
PCPU7
─
─
─
─
─
─
PF7
PFC7
PFPU7
─
6
PA6
PAC6
PAPU6
PAWU6
PB6
PBC6
PBPU6
PC6
PCC6
PCPU6
PD6
PDC6
PDPU6
─
─
─
PF6
PFC6
PFPU6
─
5
PA5
PAC5
PAPU5
PAWU5
PB5
PBC5
PBPU5
PC5
PCC5
PCPU5
PD5
PDC5
PDPU5
─
─
─
PF5
PFC5
PFPU5
─
4
PA4
PAC4
PAPU4
PAWU4
PB4
PBC4
PBPU4
PC4
PCC4
PCPU4
PD4
PDC4
PDPU4
PE4
PEC4
PEPU4
PF4
PFC4
PFPU4
─
3
PA3
PAC3
PAPU3
PAWU3
PB3
PBC3
PBPU3
PC3
PCC3
PCPU3
PD3
PDC3
PDPU3
PE3
PEC3
PEPU3
PF3
PFC3
PFPU3
─
2
PA2
PAC2
PAPU2
PAWU2
PB2
PBC2
PBPU2
PC2
PCC2
PCPU2
PD2
PDC2
PDPU2
PE2
PEC2
PEPU2
PF2
PFC2
PFPU2
─
1
PA1
PAC1
PAPU1
PAWU1
PB1
PBC1
PBPU1
PC1
PCC1
PCPU1
PD1
PDC1
PDPU1
PE1
PEC1
PEPU1
PF1
PFC1
PFPU1
─
0
PA0
PAC0
PAPU0
PAWU0
PB0
PBC0
PBPU0
PC0
PCC0
PCPU0
PD0
PDC0
PDPU0
PE0
PEC0
PEPU0
PF0
PFC0
PFPU0
LVPU
I/O 逻辑功能寄存器列表
Rev. 1.10
67
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
上拉电阻
许多产品应用在端口处于输入状态时需要外加一个上拉电阻来实现上拉的功
能。为了免去外部上拉电阻,当引脚规划为输入时,可由内部连接到一个上拉
电阻。这些上拉电阻可通过寄存器 PAPU~PFPU 和 LVPUC 来设置,它用一个
PMOS 晶体管来实现上拉电阻功能。
需注意的是,当 I/O 引脚设为逻辑输入或 NMOS 输出时,上拉功能才会受相应
的上拉电阻控制寄存器控制开启,其它状态下上拉功能不可用。
PxPU 寄存器
Bit
Name
R/W
POR
7
PxPU7
R/W
0
6
PxPU6
R/W
0
5
PxPU5
R/W
0
4
PxPU4
R/W
0
3
PxPU3
R/W
0
2
PxPU2
R/W
0
1
PxPU1
R/W
0
0
PxPU0
R/W
0
PxPUn:I/O 口 Px.n 引脚上拉电阻控制位
0:除能
1:使能
PxPUn 位用于控制 Px.n 引脚上的上拉电阻功能。这里的 x 可以是端口 A,B,C,D,E 和 F。
但是,每个 I/O 端口实际有效位可能不同。
LVPUC 寄存器
Bit
Name
R/W
POR
7
─
─
─
Bit 7~1
Bit 0
6
─
─
─
5
─
─
─
4
─
─
─
3
─
─
─
2
─
─
─
1
─
─
─
0
LVPU
R/W
0
未定义,读为“0”
LVPU:低电压上拉电阻控制位
0:所有引脚上拉电阻为 30KΩ
1:所有引脚上拉电阻为 7.5KΩ
注意因上拉电阻采用长 PMOS 晶体管,工作电压越低产生的电阻抗越高。因此
建议对于低压应用可选择较低的上拉电阻值。
PA 口唤醒
当使用暂停指令“HALT”迫使单片机进入休眠或空闲模式,单片机的系统时钟
将会停止以降低功耗,此功能对于电池及低功耗应用很重要。唤醒单片机有很
多种方法,其中之一就是使 PA 口的其中一个引脚从高电平转为低电平。这个
功能特别适合于通过外部开关来唤醒的应用。PA 口的每个引脚可以通过设置
PAWU 寄存器来单独选择是否具有唤醒功能。需要注意的是,只有当引脚功能
选为通用 I/O 功能且单片机处于休眠或空闲模式时,唤醒功能才会受 PAWU 控
制开启,其它状态下此唤醒功能不可用。
PAWU 寄存器
Bit
Name
R/W
POR
Bit 7~0
Rev. 1.10
7
6
5
4
3
2
1
0
PAWU7 PAWU6 PAWU5 PAWU4 PAWU3 PAWU2 PAWU1 PAWU0
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
PAWU7~PAWU0:PA 口唤醒功能控制位
0:除能
1:使能
68
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
输入 / 输出端口控制寄存器
每一个输入 / 输出口都具有各自的控制寄存器,即 PAC~PFC,用来控制输入 /
输出状态。从而每个 I/O 引脚都可以通过软件控制,动态的设置为 CMOS 输出
或输入。所有的 I/O 端口的引脚都各自对应于 I/O 端口控制的某一位。若 I/O 引
脚要实现输入功能,则对应的控制寄存器的位需要设置为“1”。这时程序指令
可以直接读取输入脚的逻辑状态。若控制寄存器相应的位被设定为“0”,则此
引脚被设置为 CMOS 输出。当引脚设置为输出状态时,程序指令读取的是输出
端口寄存器的内容。注意,如果对输出口做读取动作时,程序读取到的是内部
输出数据锁存器中的状态,而不是输出引脚上实际的逻辑状态。
PxC 寄存器
Bit
Name
R/W
POR
7
PxC7
R/W
1
6
PxC6
R/W
1
5
PxC5
R/W
1
4
PxC4
R/W
1
3
PxC3
R/W
1
2
PxC2
R/W
1
1
PxC1
R/W
1
0
PxC0
R/W
1
PxCn:I/O 口 Px.n 引脚输入 / 输出类型选择位
0:输出
1:输入
PxCn 位用于控制 Px.n 引脚类型。这里的 x 可以是端口 A,B,C,D,E 和 F。但是,每个
I/O 端口实际有效位可能不同。
输入 / 输出端口源电流控制
该单片机的每个 I/O 口都支持多种源电流驱动能力。通过设置相应的源电流选
择寄存器,每个 I/O 口可以提供四阶源电流输出控制。用户可参考直流电气特
性章节针对不同应用选择所需的源电流。
位
7
6
5
4
3
2
1
0
SLEDC0 SLEDC07 SLEDC06 SLEDC05 SLEDC04 SLEDC03 SLEDC02 SLEDC01 SLEDC00
SLEDC1 SLEDC17 SLEDC16 SLEDC15 SLEDC14 SLEDC13 SLEDC12 SLEDC11 SLEDC10
SLEDC2 SLEDC27 SLEDC26 SLEDC25 SLEDC24 SLEDC23 SLEDC22 SLEDC21 SLEDC20
寄存器
名称
I/O 口源电流控制寄存器列表
SLEDC0 寄存器
Bit
7
6
5
4
3
2
1
0
Name SLEDC07 SLEDC06 SLEDC05 SLEDC04 SLEDC03 SLEDC02 SLEDC01 SLEDC00
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
POR
0
0
0
0
0
0
0
0
Bit 7~6
Bit 5~4
Rev. 1.10
SLEDC07~SLEDC06:PB7~PB4 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
SLEDC05~SLEDC04:PB3~PB0 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
69
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 3~2
SLEDC03~SLEDC02:PA7~PA4 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
Bit 1~0
SLEDC01~SLEDC00:PA3~PA0 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
SLEDC1 寄存器
Bit
7
6
5
4
3
2
1
0
Name SLEDC17 SLEDC16 SLEDC15 SLEDC14 SLEDC13 SLEDC12 SLEDC11 SLEDC10
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
POR
0
0
0
0
0
0
0
0
2
1
0
Bit 7~6
SLEDC17~SLEDC16:PD6~PD4 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
Bit 5~4
SLEDC15~SLEDC14:PD3~PD0 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
Bit 3~2
SLEDC13~SLEDC12:PC7~PC4 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
Bit 1~0
SLEDC11~SLEDC10:PC3~PC0 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
SLEDC2 寄存器
Bit
7
6
5
4
3
Name SLEDC27 SLEDC26 SLEDC25 SLEDC24 SLEDC23 SLEDC22 SLEDC21 SLEDC20
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
POR
0
0
0
0
0
0
0
0
Bit 7~6
Rev. 1.10
SLEDC27~SLEDC26:PF7~PF4 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
70
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 5~4
SLEDC25~SLEDC24:PF3~PF0 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
Bit 3~2
SLEDC23~SLEDC22:PE4 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
Bit 1~0
SLEDC21~SLEDC20:PE3~PE0 源电流选择位
00:Level 0(最小)
01:Level 1
10:Level 2
11:Level 3(最大)
引脚共用功能
引脚的多功能可以增加单片机应用的灵活性。有限的引脚个数将会限制设计者,
而引脚的多功能将会解决很多此类问题。此外,这些引脚功能可以通过一系列
寄存器进行设定。
引脚共用功能选择寄存器
封装中有限的引脚个数会对某些单片机功能造成影响。然而,引脚功能共用和
引脚功能选择,使得小封装单片机具有更多不同的功能。单片机包含端口输出
功能选择寄存器和输入功能选择寄存器,这些寄存器可以用来选择多功能共用
引脚上的特定功能。
当要使用引脚上的输入功能,相关的 PxSn 及 IFSi 寄存器需先进行合理设定。
例如,I2C SDA 引脚功能被选择,需通过 IFS0 寄存器选择 SDA 信号的输入引脚,
且对应的引脚共用功能要通过寄存器 PxSn 设置为 SDI/SDA 功能。但是,如果
要使用外部中断功能,需通过 IFS1 寄存器选择外部中断信号的输入引脚,且对
应的共用引脚功能通过寄存器 PxSn 选择为普通 I/O 功能。
特别需要注意的是,要确保所需的引脚共用功能被正确地选择和取消。要选择
所需的引脚共用功能,首先应通过相应的引脚共用控制寄存器正确地选择该功
能,然后再配置相应的外围功能设置以使能外围功能。要正确地取消引脚共用
功能,首先应除能外围功能,然后再修改相应的引脚共用控制寄存器以选择其
它的共用功能。
Rev. 1.10
71
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
位
寄存器
名称
7
6
5
PAS0
PAS07
PAS06
PAS05
PAS1
PAS17
PAS16
PAS15
PBS0
PBS07
PBS06
PBS1
PBS17
PBS16
PCS0
PCS07
PCS1
PCS17
PDS0
PDS1
2
1
0
PAS04 PAS03
PAS02
PAS01
PAS00
PAS14 PAS13
PAS12
PAS11
PAS10
PBS05
PBS04 PBS03
PBS02
PBS01
PBS00
PBS15
PBS14 PBS13
PBS12
PBS11
PBS10
PCS06
PCS05
PCS04 PCS03
PCS02
PCS01
PCS00
PCS16
PCS15
PCS14 PCS13
PCS12
PCS11
PCS10
PDS07
PDS06
PDS05
PDS04 PDS03
PDS02
PDS01
PDS00
─
─
PDS15
PDS14 PDS13
PDS12
PDS11
PDS10
PES0
PES07
PES06
PES05
PES04 PES03
PES02
PES01
PES00
PES1
─
─
─
─
─
─
PES11
PES10
PFS0
PFS07
PFS06
PFS05
PFS04
PFS03
PFS02
PFS01
PFS00
PFS17
PFS16
PFS15
PFS14
PFS13
PFS12
PFS11
PFS10
PFS1
IFS0
IFS1
SCSBPS SDISDAPS
─
─
4
3
SCKSCLPS STPIPS PTPIPS STCKPS CTCKPS PTCKPS
─
─
─
─
INT1PS
INT0PS
1
PAS01
R/W
0
0
PAS00
R/W
0
引脚共用功能选择寄存器列表
● PAS0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
PAS07
R/W
0
6
PAS06
R/W
0
5
PAS05
R/W
0
4
PAS04
R/W
0
Bit 7~6
PAS07~PAS06:PA3 引脚共用功能选择
00: PA3/INT1
01: PA3/INT1
10: PA3/INT1
11: SDO
Bit 5~4
PAS05~PAS04:PA2 引脚共用功能选择
00: PA2
01: PA2
10: PA2
11: PA2
Bit 3~2
PAS03~PAS02:PA1 引脚共用功能选择
00: PA1/INT0
01: PA1/INT0
10: PA1/INT0
11: SCS
Bit 1~0
PAS01~PAS00:PA0 引脚共用功能选择
00: PA0
01: PA0
10: PA0
11: PA0
72
3
PAS03
R/W
0
2
PAS02
R/W
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● PAS1 寄存器
Bit
Name
R/W
POR
7
PAS17
R/W
0
6
PAS16
R/W
0
5
PAS15
R/W
0
4
PAS14
R/W
0
Bit 7~6
PAS17~PAS16:PA7 引脚共用功能选择
00: PA7/INT1
01: PA7/INT1
10: PA7/INT1
11: TX
Bit 5~4
PAS15~PAS14:PA6 引脚共用功能选择
00: PA6/INT0
01: PA6/INT0
10: PA6/INT0
11: RX
Bit 3~2
PAS13~PAS12:PA5 引脚共用功能选择
00: PA5
01: PA5
10: PA5
11: SCK/SCL
Bit 1~0
PAS11~PAS10:PA4 引脚共用功能选择
00: PA4
01: PA4
10: PA4
11: SDI/SDA
3
PAS13
R/W
0
2
PAS12
R/W
0
1
PAS11
R/W
0
0
PAS10
R/W
0
3
PBS03
R/W
0
2
PBS02
R/W
0
1
PBS01
R/W
0
0
PBS00
R/W
0
● PBS0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
PBS07
R/W
0
6
PBS06
R/W
0
5
PBS05
R/W
0
4
PBS04
R/W
0
Bit 7~6
PBS07~PBS06:PB3 引脚共用功能选择
00: PB3
01: PB3
10: PB3
11: CTP
Bit 5~4
PBS05~PBS04:PB2 引脚共用功能选择
00: PB2/PTCK
01: PB2/PTCK
10: PB2/PTCK
11: PTPB
Bit 3~2
PBS03~PBS02:PB1 引脚共用功能选择
00: PB1/PTPI
01: PB1/PTPI
10: PB1/PTPI
11: PTP
73
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 1~0
PBS01~PBS00:PB0 引脚共用功能选择
00: PB0
01: PB0
10: PB0
11: CX
● PBS1 寄存器
Bit
Name
R/W
POR
7
PBS17
R/W
0
6
PBS16
R/W
0
5
PBS15
R/W
0
4
PBS14
R/W
0
Bit 7~6
PBS17~PBS16:PB7 引脚共用功能选择
00: PB7
01: PB7
10: PB7
11: OSC2
Bit 5~4
PBS15~PBS14:PB6 引脚共用功能选择
00: PB6
01: PB6
10: PB6
11: OSC1
Bit 3~2
PBS13~PBS12:PB5 引脚共用功能选择
00: PB5
01: PB5
10: PB5
11: PB5
Bit 1~0
PBS11~PBS10:PB4 引脚共用功能选择
00: PB4/CTCK
01: PB4/CTCK
10: PB4/CTCK
11: CTPB
3
PBS13
R/W
0
2
PBS12
R/W
0
1
PBS11
R/W
0
0
PBS10
R/W
0
3
PCS03
R/W
0
2
PCS02
R/W
0
1
PCS01
R/W
0
0
PCS00
R/W
0
● PCS0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
PCS07
R/W
0
6
PCS06
R/W
0
5
PCS05
R/W
0
4
PCS04
R/W
0
Bit 7~6
PCS07~PCS06:PC3 引脚共用功能选择
00: PC3/PTCK
01: PC3/PTCK
10: PTPB
11: AN3
Bit 5~4
PCS05~PCS04:PC2 引脚共用功能选择
00: PC2/PTPI
01: PC2/PTPI
10: PTP
11: AN2
74
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 3~2
PCS03~PCS02:PC1 引脚共用功能选择
00: PC1
01: CMPO
10: VREF
11: AN1
Bit 1~0
PCS01~PCS00:PC0 引脚共用功能选择
00: PC0
01: PC0
10: VREFI
11: AN0
● PCS1 寄存器
Bit
Name
R/W
POR
7
PCS17
R/W
0
6
PCS16
R/W
0
5
PCS15
R/W
0
4
PCS14
R/W
0
Bit 7~6
PCS17~PCS16:PC7 引脚共用功能选择
00: PC7/STCK
01: PC7/STCK
10: STPB
11: AN7
Bit 5~4
PCS15~PCS14:PC6 引脚共用功能选择
00: PC6/STPI
01: PC6/STPI
10: STP
11: AN6
Bit 3~2
PCS13~PCS12:PC5 引脚共用功能选择
00: PC5
01: PC5
10: PC5
11: AN5
Bit 1~0
PCS11~PCS10:PC4 引脚共用功能选择
00: PC4
01: PC4
10: PC4
11: AN4
3
PCS13
R/W
0
2
PCS12
R/W
0
1
PCS11
R/W
0
0
PCS10
R/W
0
3
PDS03
R/W
0
2
PDS02
R/W
0
1
PDS01
R/W
0
0
PDS00
R/W
0
● PDS0 寄存器
Bit
Name
R/W
POR
Bit 7~6
Rev. 1.10
7
PDS07
R/W
0
6
PDS06
R/W
0
5
PDS05
R/W
0
4
PDS04
R/W
0
PDS07~PDS06:PD3 引脚共用功能选择
00: PD3
01: PD3
10: PD3
11: AN11
75
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 5~4
PDS05~PDS04:PD2 引脚共用功能选择
00: PD2
01: PD2
10: PD2
11: AN10
Bit 3~2
PDS03~PDS02:PD1 引脚共用功能选择
00: PD1
01: PD1
10: PD1
11: AN9
Bit 1~0
PDS01~PDS00:PD0 引脚共用功能选择
00: PD0
01: PD0
10: PD0
11: AN8
● PDS1 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
PDS15
R/W
0
4
PDS14
R/W
0
Bit 7~6
未定义,读为“0”
Bit 5~4
PDS15~PDS14:PD6 引脚共用功能选择
00: PD6
01: PD6
10: PD6
11: AN14
Bit 3~2
PDS13~PDS12:PD5 引脚共用功能选择
00: PD5
01: PD5
10: PD5
11: AN13
Bit 1~0
PDS11~PDS10:PD4 引脚共用功能选择
00: PD4
01: PD4
10: PD4
11: AN12
3
PDS13
R/W
0
2
PDS12
R/W
0
1
PDS11
R/W
0
0
PDS10
R/W
0
3
PES03
R/W
0
2
PES02
R/W
0
1
PES01
R/W
0
0
PES00
R/W
0
● PES0 寄存器
Bit
Name
R/W
POR
Bit 7~6
Rev. 1.10
7
PES07
R/W
0
6
PES06
R/W
0
5
PES05
R/W
0
4
PES04
R/W
0
PES07~PES06:PE3 引脚共用功能选择
00: PE3
01: PE3
10: PE3
11: CTP
76
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 5~4
PES05~PES04:PE2 引脚共用功能选择
00: PE2/CTCK
01: PE2/CTCK
10: PE2/CTCK
11: CTPB
Bit 3~2
PES03~PES02:PE1 引脚共用功能选择
00: PE1/STPI
01: PE1/STPI
10: PE1/STPI
11: STP
Bit 1~0
PES01~PES00:PE0 引脚共用功能选择
00: PE0/STCK
01: PE0/STCK
10: PE0/STCK
11: STPB
● PES1 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
Bit 7~2
未定义,读为“0”
Bit 1~0
PES11~PES10:PE4 引脚共用功能选择
00: PE4
01: PE4
10: PE4
11: PE4
3
─
─
─
2
─
─
─
1
PES11
R/W
0
0
PES10
R/W
0
3
PFS03
R/W
0
2
PFS02
R/W
0
1
PFS01
R/W
0
0
PFS00
R/W
0
● PFS0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
PFS07
R/W
0
6
PFS06
R/W
0
5
PFS05
R/W
0
4
PFS04
R/W
0
Bit 7~6
PFS07~PFS06:PF3 引脚共用功能选择
00: PF3
01: PF3
10: SCK/SCL
11: SCOM3
Bit 5~4
PFS05~PFS04:PF2 引脚共用功能选择
00: PF2
01: PF2
10: SDI/SDA
11: SCOM2
Bit 3~2
PFS03~PFS02:PF1 引脚共用功能选择
00: PF1
01: PF1
10: SDO
11: SCOM1
77
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 1~0
PFS01~PFS00:PF0 引脚共用功能选择
00: PF0
01: PF0
10: SCS
11: SCOM0
● PFS1 寄存器
Bit
Name
R/W
POR
7
PFS17
R/W
0
6
PFS16
R/W
0
5
PFS15
R/W
0
4
PFS14
R/W
0
Bit 7~6
PFS17~PFS16:PF7 引脚共用功能选择
00: PF7
01: PF7
10: PF7
11: C+
Bit 5~4
PFS15~PFS14:PF6 引脚共用功能选择
00: PF6
01: PF6
10: C11: AN15
Bit 3~2
PFS13~PFS12:PF5 引脚共用功能选择
00: PF5
01: PF5
10: PF5
11: XT1
Bit 1~0
PFS11~PFS10:PF4 引脚共用功能选择
00: PF4
01: PF4
10: PF4
11: XT2
3
PFS13
R/W
0
2
PFS12
R/W
0
1
PFS11
R/W
0
0
PFS10
R/W
0
3
2
1
0
● IFS0 寄存器
Bit
7
6
5
4
Name SCSBPS SDISDAPS SCKSCLPS STPIPS PTPIPS STCKPS CTCKPS PTCKPS
Rev. 1.10
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
POR
0
0
0
0
0
0
0
0
Bit 7
SCSBPS:SCS 输入源引脚选择
0: PA1
1: PF0
Bit 6
SDISDAPS:SDI/SDA 输入源引脚选择
0: PA4
1: PF2
Bit 5
SCKSCLPS:SCK/SCL 输入源引脚选择
0: PA5
1: PF3
Bit 4
STPIPS:STPI 输入源引脚选择
0: PC6
1: PE1
78
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 3
PTPIPS:PTPI 输入源引脚选择
0: PC2
1: PB1
Bit 2
STCKPS:STCK 输入源引脚选择
0: PC7
1: PE0
Bit 1
CTCKPS:CTCK 输入源引脚选择
0: PB4
1: PE2
Bit 0
PTCKPS:PTCK 输入源引脚选择
0: PC3
1: PB2
● IFS1 寄存器
Bit
Name
R/W
POR
7
—
—
—
6
—
—
—
5
—
—
—
4
—
—
—
Bit 7~2
未定义,读为“0”
Bit 1
INT1PS:INT1 输入源引脚选择
0: PA3
1: PA7
Bit 0
INT0PS:INT0 输入源引脚选择
0: PA1
1: PA6
3
—
—
—
2
—
—
—
1
0
INT1PS INT0PS
R/W
R/W
0
0
输入 / 输出引脚结构
下图为输入 / 输出引脚逻辑功能的内部结构图。具体输入 / 输出引脚的逻辑结构
图可能与此图不同,这里只是为了方便对 I/O 引脚逻辑功能的理解提供一个参
考。由于存在诸多的引脚共用结构,在此不方便提供所有类型引脚功能结构图。
VDD
Control Bit
Data Bus
Write Control Register
Chip Reset
Read Control Register
D
Weak
Pull-up
CK Q
S
I/O pin
Data Bit
D
Write Data Register
Q
Pull-high
Register
Select
Q
CK Q
S
Read Data Register
System Wake-up
M
U
X
wake-up Select
PA only
逻辑功能输入 / 输出端口
Rev. 1.10
79
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
编程注意事项
在编程中,最先要考虑的是端口的初始化。复位之后,所有的输入 / 输出数据
及端口控制寄存器都将被设为逻辑高。所有输入 / 输出引脚默认为输入状态,
而其电平则取决于其它相连接电路以及是否选择了上拉电阻。如果端口控制寄
存器 PAC~PFC,某些引脚位被设定输出状态,这些输出引脚会有初始高电平输
出,除非数据寄存器端口 PA~PF 在程序中被预先设定。设置哪些引脚是输入及
哪些引脚是输出,可通过设置正确的值到适当的端口控制寄存器,或使用指令
“SET [m].i”及“CLR [m].i”来设定端口控制寄存器中个别的位。注意,当使
用这些位控制指令时,系统即将产生一个读 - 修改 - 写的操作。单片机需要先
读入整个端口上的数据,修改个别的位,然后重新把这些数据写入到输出端口。
PA 口的每个引脚都带唤醒功能。单片机处于休眠或空闲模式时,有很多方法可
以唤醒单片机,其中之一就是通过 PA 任一引脚电平从高到低转换的方式,可
以设置 PA 口一个或多个引脚具有唤醒功能。
Rev. 1.10
80
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
定时器模块 – TM
控制和测量时间在任何单片机中都是一个很重要的部分。该单片机提供几个定
时器模块(简称 TM),来实现和时间有关的功能。定时器模块是包括多种操
作的定时单元,提供的操作有:定时 / 事件计数器,捕捉输入,比较匹配输出,
单脉冲输出以及 PWM 输出等功能。每个定时器模块有两个独立中断。每个
TM 外加的输入输出引脚,扩大了定时器的灵活性,便于用户使用。
这里只介绍各种 TM 的共性,更多详细资料请参考简易型、标准型和周期型定
时器章节。
简介
该单片机包含 3 个 TM,每个 TM 即可归为一类,分别为简易型 TM(CTM)、
标准型 TM(STM)或周期型 TM(PTM)。虽然性质相似,但不同 TM 特性
复杂度不同。本章介绍简易型、标准型和周期型 TM 的共性,更多详细资料分
别见后面各章。三种类型 TM 的特性和区别见下表。
功能
定时 / 计数器
捕捉输入
比较匹配输出
PWM 通道数
单脉冲输出
PWM 对齐方式
PWM 调节周期 & 占空比
CTM
√
─
√
1
─
边沿对齐
占空比或周期
STM
√
√
√
1
1
边沿对齐
占空比或周期
PTM
√
√
√
1
1
边沿对齐
占空比或周期
TM 操作
三种不同类型的 TM 提供从简单的定时操作到 PWM 信号产生等多种功能。理
解 TM 操作的关键是比较 TM 内独立运行的计数器的值与内部比较器的预置值。
当计数器的值与比较器的预置值相同时,则比较匹配,TM 中断信号产生,清
零计数器并改变 TM 输出引脚的状态。用户选择内部时钟或外部时钟来驱动内
部 TM 计数器。
TM 时钟源
驱动 TM 计数器的时钟源很多。通过设置 TM 控制寄存器的 xTCK2~xTCK0 位
( 其中的 x 可为 C,S 或 P,即表示不同的 TM 类型 ),选择所需的时钟源。该
时钟源来自系统时钟 fSYS 或内部高速时钟 fH 或 fSUB 时钟源或外部 xTCK 引脚。
xTCK 引脚时钟源用于允许外部信号作为 TM 时钟源或用于事件计数。
TM 中断
每种类型 TM 都拥有两个内部中断,分别是内部比较器 A 或比较器 P,当比较
匹配发生时产生 TM 中断。当 TM 中断产生时,计数器清零并改变 TM 输出引
脚的状态。
Rev. 1.10
81
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
TM 外部引脚
每种类型的 TM 都有一个或两个 TM 输入引脚 xTCK 或 xTPI。 xTM 输入引脚
xTCK 作为 xTM 时钟源输入脚,通过设置 xTMC0 寄存器中的 xTCK2~xTCK0
位进行选择。外部时钟源可通过该引脚来驱动内部 TM。TM 引脚可选择上升沿
有效或下降沿有效。对于 PTM 和 STM,xTCK 引脚还可用作 xTM 单脉冲输出
模式的外部触发引脚。
对于 PTM 和 STM,具有另一个输入引脚 xTPI,可作为捕捉输入脚,其有效边
沿有上升沿、下降沿和双沿,通过设置 xTMC1 寄存器中的 xTIO1~xTIO0 位来
选择有效边沿类型。此外,对于 PTM,除了 PTPI 引脚,PTCK 引脚除可以用
作外部触发引脚外也可用作 PTM 捕捉输入模式时输入源。
每个 TM 都提供两个输出引脚 xTP 和 xTPB。xTPB 输出信号为 xTP 输出的反相
信号。当 TM 工作在比较匹配输出模式且比较匹配发生时,这些引脚会由 TM
控制切换到高电平或低电平或翻转。外部 xTPn 和 xTPnB 输出引脚也被 TM 用
来产生 PWM 输出波形。因 TM 输入和输出引脚与其它功能共用引脚,在使能
TM 功能前,应先通过相关引脚共用功能选择寄存器选择 TM 输入和输出引脚
功能。
CTM
输入
输出
CTCK CTP,CTPB
STM
输入
STCK,STPI
PTM
输出
STP,STPB
输入
PTCK,PTPI
输出
PTP,PTPB
TM 外部引脚
TM 外部引脚控制寄存器
通过设置相关引脚共用功能选择寄存器选择引脚功能为 TM 输入 / 输出功能或
其它共用功能。每个 TM 输入 / 输出引脚都可通过对应的引脚共用功能选择位
进行设置。正确设置选择位将相应的引脚用作 TM 输入 / 输出。更多引脚共用
功能选择详见引脚共用功能章节。
CTCK
CTM
CCR output
CTP
CTPB
CTM 功能引脚控制方框图
STCK
CCR capture input
STM
CCR output
STPI
STP
STPB
STM 功能引脚控制方框图
Rev. 1.10
82
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
PTCK
CCR capture input
PTM
CCR output
PTPI
PTP
PTPB
PTM 功能引脚控制方框图
编程注意事项
TM 计数寄存器和捕捉 / 比较寄存器 CCRA 或 CCRP,含有低字节和高字节结构。
高字节可直接访问,低字节则仅能通过一个内部 8-bit 的缓存器进行访问。值得
注意的是 8-bit 缓存器的存取数据及相关低字节的读写操作仅在其相应的高字节
读取操作执行时发生。
CCRA 和 CCRP 寄存器访问方式如下图所示,读写这些成对的寄存器需通过特
殊的方式。建议使用“MOV”指令按照以下步骤访问 CCRA 或 CCRP 低字节
寄存器,xTMAL 或 PTMRPL,否则可能导致无法预期的结果。
xTM Counter Register (Read only)
xTMDL
xTMDH
8-bit Buffer
xTMAL
xTMAH
xTM CCRA Register (Read/Write)
PTMRPL
PTMRPH
PTM CCRP Register (Read/Write)
Data Bus
读写流程如下步骤所示:
● 写数据至 CCRA 或 CCRP
♦ 步骤 1. 写数据至低字节寄存器 xTMAL 或 PTMRPL
– 注意,此时数据仅写入 8-bit 缓存器。
♦ 步骤 2. 写数据至高字节寄存器 xTMAH 或 PTMRPH
– 注意,此时数据直接写入高字节寄存器,同时锁存在 8-bit 缓存器中的数据写
入低字节寄存器。
● 由计数器寄存器和 CCRA 或 CCRP 中读取数据
♦ 步骤 1. 由高字节寄存器 xTMDH、xTMAH 或 PTMRPH 读取数据
– 注意,此时高字节寄存器中的数据直接读取,同时由低字节寄存器读取的数
据锁存至 8-bit 缓存器中。
♦ 步骤 2. 由低字节寄存器 xTMDL、xTMAL 或 PTMRPL 读取数据
– 注意,此时读取 8-bit 缓存器中的数据。
Rev. 1.10
83
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
简易型 TM – CTM
简易型 TM 包括三种工作模式,即比较匹配输出,定时 / 事件计数器和 PWM
输出模式。简易型 TM 也由一个外部输入脚控制并驱动两个外部输出脚。
CTM 核心
16-bit CTM
CTM 输入引脚
CTCK
CTM 输出引脚
CTP,CTPB
CCRP
8-bit Comparator P
fSYS/4
fSYS
fH/16
fH/64
fSUB
fSUB
001
011
101
Counter Clear
16-bit Count-up Counter
100
CTON
CTPAU
16-bit Comparator A
0
1
CTCCLR
b0~b15
111
CTMPF Interrupt
CTOC
b8~b15
010
110
CTCK
Comparator P Match
000
Comparator A Match
Output
Control
Polarity
Control
Pin
Control
CTM1, CTM0
CTIO1, CTIO0
CTPOL
PxSn
CTP
CTPB
CTMAF Interrupt
CTCK2~CTCK0
CCRA
简易型 TM 方框图
简易型 TM 操作
简易型 TM 核心是一个由用户选择的内部或外部时钟源驱动的 16 位向上计数
器,它还包括两个内部比较器即比较器 A 和比较器 P。这两个比较器将计数器
的值与 CCRP 和 CCRA 寄存器中的值进行比较。CCRP 是 8 位的,与计数器的
高 8 位比较;而 CCRA 是 16 位的,与计数器的所有位比较。
通过应用程序改变 16 位计数器值的唯一方法是使 CTON 位发生上升沿跳变清
除计数器。此外,计数器溢出或比较匹配也会自动清除计数器。上述条件发生
时,通常情况下会产生 TM 中断信号。简易型 TM 可工作在不同的模式,可由
包括来自输入脚的不同时钟源驱动,也可以控制两个输出脚。所有工作模式的
设定都是通过设置相关内部寄存器来实现的。
简易型 TM 寄存器介绍
简易型 TM 的所有操作由一系列寄存器控制。包含一对只读寄存器用来存放 16
位计数器的值,一对读 / 写寄存器存放 16 位 CCRA 的值,CTMRP 寄存器用于
存放 8 位 CCRP 的值。剩下两个控制寄存器设置不同的操作和控制模式。
位
寄存器
名称
7
6
5
4
3
CTMC0 CTPAU CTCK2 CTCK1 CTCK0 CTON
CTMC1 CTM1 CTM0 CTIO1 CTIO0 CTOC
CTMDL
D7
D6
D5
D4
D3
CTMDH D15
D14
D13
D12
D11
CTMAL
D7
D6
D5
D4
D3
CTMAH D15
D14
D13
D12
D11
CTMRP
D7
D6
D5
D4
D3
2
1
0
─
─
─
CTPOL CTDPX CTCCLR
D2
D1
D0
D10
D9
D8
D2
D1
D0
D10
D9
D8
D2
D1
D0
16-bit 简易型 TM 寄存器列表
Rev. 1.10
84
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
CTMC0 寄存器
Bit
Name
R/W
POR
7
6
5
4
CTPAU CTCK2 CTCK1 CTCK0
R/W
R/W
R/W
R/W
0
0
0
0
3
CTON
R/W
0
2
─
─
─
1
─
─
─
0
─
─
─
Bit 7
CTPAU:CTM 计数器暂停控制位
0:运行
1:暂停
通过设置此位为高可暂停计数器。此位清零可恢复正常计数器操作。在暂停情
况下 CTM 将保持上电并继续产生功耗。当此位由低到高转换,计数器将保留其
剩余值,当其电平再变为低时从此位开始继续计数。
Bit 6~4
CTCK2~CTCK0:CTM 计数器时钟选择位
000:fSYS/4
001:fSYS
010:fH/16
011:fH/64
100:fSUB
101:fSUB
110:CTCK 上升沿时钟
111:CTCK 下降沿时钟
此三位用于选择 CTM 的时钟源。外部引脚时钟源能被选择在上升沿或下降沿有
效。fSYS 是系统时钟,fH 和 fSUB 是其它的内部时钟源,细节方面请参考振荡器章
节。
Bit 3
CTON:CTM 计数器 On/Off 控制位
0:Off
1:On
此位控制 CTM 的总开关功能。设置此位为高可使能计数器使其运行,清零此位
则除能 CTM。清零此位将停止计数器并关闭 CTM 减少功耗。当此位经由低到
高转换时,内部计数器将复位清零,当此位由高到低转换时,内部计数器将保
持其剩余值直到此位再次转变为高。
若 CTM 处于比较匹配输出模式或 PWM 输出模式,当 CTON 位经由低到高转换
时, CTM 输出脚将复位至 CTOC 位指定的初始值。
Bit 2~0
未定义,读为“0”
CTMC1 寄存器
Bit
Name
R/W
POR
Bit 7~6
Rev. 1.10
7
CTM1
R/W
0
6
CTM0
R/W
0
5
CTIO1
R/W
0
4
CTIO0
R/W
0
3
CTOC
R/W
0
2
1
0
CTPOL CTDPX CTCCLR
R/W
R/W
R/W
0
0
0
CTM1~CTM0:CTM 工作模式选择位
00:比较匹配输出模式
01:未定义
10:PWM 输出模式
11:定时 / 计数器模式
这两个位为 CTM 设置所需的工作模式。为保证操作的可靠性,在此位段发生任
何改变之前需先关闭 CTM。在定时 / 计数器模式下,CTM 输出引脚状态未定义。
85
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 5~4
Bit 3
Rev. 1.10
CTIO1~CTIO0:CTM CTP 引脚功能选择位
比较匹配输出模式
00:未改变
01:输出低
10:输出高
11:输出翻转
PWM 输出模式
00:PWM 输出无效状态
01:PWM 输出有效状态
10:PWM 输出
11:未定义
定时 / 计数器模式
未使用
这两位用于确定在达到某些条件时 CTM 输出状态应如何改变。这些位的功能选
择取决于当下 CTM 的工作模式。
在比较匹配输出模式下,CTIO1 和 CTIO0 位决定当比较器 A 比较匹配输出发生
时 CTM 输出脚如何改变状态。当比较器 A 比较匹配输出发生时 CTM 输出脚能
设为切换高、切换低或翻转当前状态。若此两位同时为 0 时,输出将不会改变。
CTM 输出脚的初始值通过 CTOC 位设置取得。注意,由 CTIO1 和 CTIO0 位得
到的输出电平必须与通过 CTOC 位设置的初始值不同,否则当比较匹配发生时,
CTM 输出脚将不会发生变化。在 CTM 输出脚改变状态后,通过 CTON 位由低
到高电平的转换可复位至初始值。
在 PWM 输出模式,CTIO1 和 CTIO0 用于决定比较匹配条件发生时怎样改变
TM 输出脚的状态。PWM 输出功能通过这两位的变化进行更新。仅在 CTM 关
闭时改变 CTIO1 和 CTIO0 位的值是很有必要的。若在 CTM 运行时改变 CTIO1
和 CTIO0 的值,PWM 输出的值将无法预料。
CTOC:CTP 输出控制位
比较匹配输出模式
0:初始低
1:初始高
PWM 输出模式
0:低有效
1:高有效
此位为 CTM 输出脚的输出控制位。它取决于 CTM 此时正运行于比较匹配输出
模式还是 PWM 输出模式。若 CTM 处于定时 / 计数器模式,则其不受影响。在
比较匹配输出模式时,比较匹配发生前其决定 CTM 输出脚的逻辑电平值。在
PWM 输出模式时,其决定 PWM 信号是高有效还是低有效。
Bit2
CTPOL:CTP 输出极性控制位
0:同相
1:反相
此位控制 CTP 输出脚的极性。此位为高时 CTP 输出脚反相,为低时 CTP 输出
脚同相。若 CTM 处于定时 / 计数器模式时,此位无效。
Bit 1
CTDPX:CTM PWM 周期 / 占空比控制位
0:CCRP - 周期;CCRA - 占空比
1:CCRP - 占空比;CCRA - 周期
此位决定 CCRA 与 CCRP 寄存器哪个被用于 PWM 波形的周期和占空比控制。
Bit 0
CTCCLR:选择 CTM 计数器清零条件位
0:CTM 比较器 P 匹配
1:CTM 比较器 A 匹配
此位用于选择清除计数器的方法。简易型 TM 包括两个比较器 - 比较器 A 和比
较器 P。这两个比较器每个都可以用于清除内部计数器。CTCCLR 位设为高,
计数器在比较器 A 比较匹配发生时被清除;此位设为低,计数器在比较器 P 比
较匹配发生或计数器溢出时被清除。计数器溢出清除的方法仅在 CCRP 的位都
被清除为 0 时才能生效。CTCCLR 位在 PWM 输出模式时未使用。
86
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
CTMDL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R
0
6
D6
R
0
5
D5
R
0
4
D4
R
0
3
D3
R
0
2
D2
R
0
1
D1
R
0
0
D0
R
0
3
D11
R
0
2
D10
R
0
1
D9
R
0
0
D8
R
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
3
D11
R/W
0
2
D10
R/W
0
1
D9
R/W
0
0
D8
R/W
0
CTM 计数器低字节寄存器 bit7~bit0
CTM 16-bit 计数器 bit7~bit0
CTMDH 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D15
R
0
6
D14
R
0
5
D13
R
0
4
D12
R
0
CTM 计数器高字节寄存器 bit7~bit0
CTM 16-bit 计数器 bit15~bit8
CTMAL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R/W
0
6
D6
R/W
0
5
D5
R/W
0
4
D4
R/W
0
CTM CCRA 低字节寄存器 bit7~bit0
CTM 16-bit CCRA bit7~bit0
CTMAH 寄存器
Bit
Name
R/W
POR
Bit 7~0
Rev. 1.10
7
D15
R/W
0
6
D14
R/W
0
5
D13
R/W
0
4
D12
R/W
0
CTM CCRA 高字节寄存器 bit7~bit0
CTM 16-bit CCRA bit15~bit8
87
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
CTMRP 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R/W
0
6
D6
R/W
0
5
D5
R/W
0
4
D4
R/W
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
CTM CCRP 寄存器 bit7~bit0
CTM CCRP 8-bit 寄存器,与 CTM 计数器 bit15~bit8 比较。
比较器 P 匹配周期
0:65536 个 CTM 时钟周期
1~255:256×(1~255) 个 CTM 时钟周期
此八位设定内部 CCRP 8-bit 寄存器的值,然后与内部计数器的高八位进行比较。
如果 CTCCLR 位设为 0 时,此比较结果可用于清零内部计数器。CTCCLR 位设
为低,CCRP 比较匹配结果将重置内部计数器。由于 CCRP 只与计数器高八位
比较,比较结果是 256 时钟周期的倍数。CCRP 被清零时,实际上会使得计数
器在最大值溢出。
简易型 TM 工作模式
简易型 TM 有三种工作模式,即比较匹配输出模式,PWM 输出模式或定时 / 计
数器模式。通过设置 CTMC1 寄存器的 CTM1 和 CTM0 位选择任意工作模式。
比较匹配输出模式
要工作在此模式,CTMC1 寄存器中的 CTM1 和 CTM0 位需要设置为“00”。
当工作在该模式,一旦计数器使能并开始计数,有三种方法来清零,分别是:
计数器溢出,比较器 A 比较匹配发生和比较器 P 比较匹配发生。当 CTCCLR
位为低,有两种方法清除计数器。一种是比较器 P 比较匹配发生,另一种是
CCRP 所有位设置为零并使得计数器溢出。此时,比较器 A 和比较器 P 的请求
标志位 CTMAF 和 CTMPF 将分别置起。
如果 CTMC1 寄存器的 CTCCLR 位设置为高,当比较器 A 比较匹配发生时计数
器被清零。此时,即使 CCRP 寄存器的值小于 CCRA 寄存器的值,仅 CTMAF
中断请求标志产生。所以当 CTCCLR 为高时,不产生 CTMPF 中断请求标志。
如果 CCRA 被清零,当计数达到最大值 FFFFH 时,计数器溢出,而此时不产
生 CTMAF 请求标志。
正如该模式名所言,当比较匹配发生后,CTM 输出脚状态改变。当比较器 A
比较匹配发生后 CTMAF 标志产生时,CTM 输出脚状态改变。比较器 P 比较匹
配发生时产生的 CTMPF 标志不影响 CTM 输出脚。CTM 输出脚状态改变方式
由 CTMC1 寄存器中 CTIO1 和 CTIO0 位决定。当比较器 A 比较匹配发生时,
CTIO1 和 CTIO0 位决定 CTM 输出脚输出高,低或翻转当前状态。CTM 输出脚
初 始 值, 在 CTON 位 由 低 到 高 电 平 的 变 化 后 通 过 CTOC 位 设 置。 注 意, 若
CTIO1 和 CTIO0 位同时为 0 时,引脚输出不变。
Rev. 1.10
88
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter overflow
Counter Value
0xFFFF
CTCCLR = 0; CTM [1:0] = 00
CCRP > 0
Counter cleared by CCRP value
CCRP=0
CCRP > 0
Counter
Restart
Resume
CCRP
Stop
Pause
CCRA
Time
CTON
CTPAU
CTPOL
CCRP Int. flag
CTMPF
CCRA Int. flag
CTMAF
CTM O/P Pin
Output pin set to
initial Level Low if
CTOC=0
Output not affected by
CTMAF flag. Remains High
until reset by CTON bit
Output Toggle
with CTMAF flag
Here CTIO [1:0] = 11
Toggle Output select
Note CTIO [1:0] = 10
Active High Output select
Output Inverts
when CTPOL is high
Output Pin
Reset to Initial value
Output controlled by other
pin-shared function
比较匹配输出模式 – CTCCLR=0
注:1. CTCCLR = 0 时,比较器 P 匹配将清除计数器。
2. CTM 输出引脚仅由 CTMAF 标志位控制
3. 输出引脚通过 CTON 位上升沿复位为初始值
Rev. 1.10
89
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
CTCCLR = 1; CTM [1:0] = 00
CCRA = 0
Counter overflow
CCRA > 0 Counter cleared by CCRA value
0xFFFF
CCRA=0
Resume
CCRA
Pause
Stop
Counter Restart
CCRP
Time
CTON
CTPAU
CTPOL
No CTMAF flag
generated on
CCRA overflow
CCRA Int. flag
CTMAF
CCRP Int. flag
CTMPF
CTM O/P Pin
CTMPF not
generated
Output pin set to
initial Level Low if
CTOC=0
Output does
not change
Output not affected by
CTMAF flag. Remains High
until reset by CTON bit
Output Toggle
with CTMAF flag
Here CTIO [1:0] = 11
Toggle Output select
Note CTIO [1:0] = 10
Active High Output select
Output Inverts
when CTPOL is high
Output Pin
Reset to Initial value
Output controlled by other
pin-shared function
比较匹配输出模式 – CTCCLR = 1
注:1. CTCCLR = 1 时,比较器 A 匹配将清除计数器
2. CTM 输出引脚控制仅由 CTMAF 标志位控制
3. 输出引脚通过 CTON 上升沿复位至初始值
4. 当 CTCCLR = 1 时不产生 CTMPF 标志位
Rev. 1.10
90
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
定时 / 计数器模式
要工作在此模式,CTMC1 寄存器中的 CTM1 和 CTM0 位需要设置为“11”。
定时 / 计数器模式与比较输出模式操作方式相同,并产生同样的中断请求标志。
不同的是,在定时 / 计数器模式下 CTM 输出脚未使用。因此,比较匹配输出模
式中的描述和时序图可以帮助理解此功能。该模式中未使用的 CTM 输出脚用
作普通 I/O 脚或其它功能。
PWM 输出模式
要工作在此模式,CTMC1 寄存器中的 CTM1 和 CTM0 位需要设置为“10”。
TM 的 PWM 功能在马达控制,加热控制,照明控制等方面十分有用。给 TM
输出脚提供一个频率固定但占空比可调的信号,将产生一个有效值等于 DC 均
方根的 AC 方波。
由于 PWM 波形的周期和占空比可控,其波形的选择就较为灵活。在 PWM 输
出模式中,CTCCLR 位不影响 PWM 操作。CCRA 和 CCRP 寄存器决定 PWM
波形,一个用来清除内部计数器并控制 PWM 波形的频率,另一个用来控制占
空比。哪个寄存器控制频率或占空比取决于 CTMC1 寄存器的 CTDPX 位。所
以 PWM 波形频率和占空比由 CCRA 和 CCRP 寄存器共同决定。
当比较器 A 或比较器 P 比较匹配发生时,将产生 CCRA 或 CCRP 中断标志。
CTMC1 寄存器中的 CTOC 位决定 PWM 波形的极性,CTIO1 和 CTIO0 位使能
PWM 输出或将 CTM 输出脚置为逻辑高或逻辑低。CTPOL 位对 PWM 输出波
形的极性取反。
● 16-bit CTM,PWM 输出模式,边沿对其模式,CTDPX = 0
CCRP
Period
Duty
1~255
CCRP×256
0
65536
CCRA
若 fSYS=16MHz,CTM 时钟源选择 fSYS/4,CCRP=2,CCRA=128,
CTM PWM 输出频率 = (fSYS/4)/(2×256) = fSYS/2048=8kHz,duty=128/(2×256)= 25%。
若由 CCRA 寄存器定义的 Duty 值等于或大于 Period 值,PWM 输出占空比为
100%。
● 16-bit CTM,PWM 输出模式,边沿对其模式,CTDPX = 1
CCRP
Period
Duty
1~255
0
CCRA
CCRP×256
65536
PWM 的输出周期由 CCRA 寄存器的值与 CTM 的时钟共同决定,PWM 的占空
比由 CCRP 寄存器的值决定。
Rev. 1.10
91
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
CTDPX = 0; CTM [1:0] = 10
Counter cleared by
CCRP
Counter Reset when
CTON returns high
CCRP
Pause
Resume
Counter Stop if
CTON bit low
CCRA
Time
CTON
CTPAU
CTPOL
CCRA Int.
flag CTMAF
CCRP Int.
flag CTMPF
PWM resumes
Output controlled by operation
other pin-shared function
Output Inverts
when CTPOL = 1
PWM Period set by CCRP
PWM Duty Cycle
set by CCRA
PWM 输出模式 – CTDPX = 0
注:1. CTDPX = 0 ,计数器由 CCRP 清除
2. 计数器清零设置 PWM 周期
3. 即使当 CTIO[1:0] = 00 或 01,内部 PWM 功能不变
4. CTCCLR 位对 PWM 操作没有影响
Rev. 1.10
92
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
CTDPX = 1; CTM [1:0] = 10
Counter cleared by
CCRA
Counter Reset when
CTON returns high
CCRA
Pause
Resume
Counter Stop if
CTON bit low
CCRP
Time
CTON
CTPAU
CTPOL
CCRP Int.
flag CTMPF
CCRA Int.
flag CTMAF
CTM O/P Pin
(CTOC=1)
CTM O/P Pin
(CTOC=0)
PWM Duty Cycle
set by CCRP
PWM resumes
operation
Output controlled by
other pin-shared function
Output Inverts
when CTPOL = 1
PWM Period set by CCRA
PWM 输出模式 – CTDPX = 1
注:1. CTDPX = 1,计数器由 CCRA 清除
2. 计数器清除设置 PWM 周期
3. 即使当 CTIO[1:0] = 00 或 01,内部 PWM 功能不变
4. CTCCLR 位对 PWM 操作无影响
Rev. 1.10
93
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
标准型 TM – STM
标准型 TM 包括 5 种工作模式,即比较匹配输出,定时 / 事件计数器,捕捉输入,
单脉冲输出和 PWM 输出模式。标准型 TM 由两个外部输入脚控制并驱动两个
外部输出脚。
STM 核心
16-bit STM
STM 输入引脚
STCK,STPI
STM 输出引脚
STP,STPB
CCRP
fSYS/4
fSYS
fH/16
fH/64
fSUB
fSUB
001
011
101
Counter Clear
16-bit Count-up Counter
100
STON
STPAU
111
STCK2~STCK0
STMPF Interrupt
STOC
b8~b15
010
110
STCK
Comparator P Match
8-bit Comparator P
000
0
1
STCCLR
b0~b15
16-bit Comparator A
Comparator A Match
STIO1, STIO0
Edge
Detector
CCRA
Output
Control
Polarity
Control
Pin
Control
STM1, STM0
STIO1, STIO0
STPOL
PxSn
STP
STPB
STMAF Interrupt
PxSn IFSi
Pin
Control
STPI
标准型 TM 框图
标准型 TM 操作
标准型 TM 核心是一个由用户选择的内部或外部时钟源驱动的 16 位向上计数
器,它还包括两个内部比较器即比较器 A 和比较器 P。这两个比较器将计数器
的值与 CCRP 和 CCRA 寄存器中的值进行比较。CCRP 是 8 位宽度,与计数器
的高 8 位比较;而 CCRA 是 16 位的,与计数器的所有位比较。
通过应用程序改变 16 位计数器值的唯一方法是使 STON 位发生上升沿跳变清
除计数器。此外,计数器溢出或比较匹配也会自动清除计数器。上述条件发生
时,通常情况会产生 STM 中断信号。标准型 TM 可工作在不同的模式,可由包
括来自输入脚的不同时钟源驱动,也可以控制输出脚。所有工作模式的设定都
是通过设置相关寄存器来实现的。
标准型 TM 寄存器介绍
标准型 TM 的所有工作由一系列寄存器控制。一对只读寄存器用来存放 16 位计
数器的值,一对读 / 写寄存器存放 16 位 CCRA 的值,一个读 / 写寄存器存放 8
位 CCRP 的值。剩下两个控制寄存器设置不同的操作和控制模式。
位
寄存器
名称
7
6
5
4
3
STMC0 STPAU STCK2 STCK1 STCK0 STON
STMC1 STM1 STM0 STIO1 STIO0 STOC
STMDL
D7
D6
D5
D4
D3
STMDH D15
D14
D13
D12
D11
STMAL
D7
D6
D5
D4
D3
STMAH D15
D14
D13
D12
D11
STMRP
D7
D6
D5
D4
D3
2
1
0
—
—
—
STPOL STDPX STCCLR
D2
D1
D0
D10
D9
D8
D2
D1
D0
D10
D9
D8
D2
D1
D0
16-bit 标准型 TM 寄存器列表
Rev. 1.10
94
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
STMC0 寄存器
Bit
Name
R/W
POR
7
6
5
4
STPAU STCK2 STCK1 STCK0
R/W
R/W
R/W
R/W
0
0
0
0
3
STON
R/W
0
2
—
—
—
1
—
—
—
0
—
—
—
Bit 7
STPAU:STM 计数器暂停控制位
0:运行
1:暂停
通过设置此位为高可使计数器暂停,清零此位恢复正常计数器操作。当处于暂
停条件时,STM 保持上电状态并继续耗电。当此位由低到高转换时,计数器将
保留其剩余值,直到此位再次改变为低电平,并从此值开始继续计数。
Bit 6~4
STCK2~STCK0:选择 STM 计数时钟位
000:fSYS/4
001:fSYS
010:fH/16
011:fH/64
100:fSUB
101:fSUB
110:STCK 上升沿时钟
111:STCK 下降沿时钟
此三位用于选择 STM 的时钟源。外部引脚时钟源能被选择在上升沿或下降沿有
效。fSYS 是系统时钟,fH 和 fSUB 是其它的内部时钟源,细节方面请参考振荡器章节。
Bit 3
STON:STM 计数器 On/Off 控制位
0:Off
1:On
此位控制 STM 的总开关功能。设置此位为高则使能计数器使其运行,清零此位
则除能 STM。清零此位将停止计数器并关闭 STM 减少耗电。当此位经由高到
低转换时,内部计数器将复位清零;当此位经由高到低的转换时,内部计数器
将保持其剩余值,直到此位再次改变为高电平。
若 STM 处于比较匹配输出模式、PWM 输出模式或单脉冲输出模式,当 STON
位经由低到高的转换时,STM 输出脚将复位至 STOC 位指定的初始值。
Bit 2~0
未定义,读为“0”
STMC1 寄存器
Bit
Name
R/W
POR
Bit 7~6
Rev. 1.10
7
STM1
R/W
0
6
STM0
R/W
0
5
STIO1
R/W
0
4
STIO0
R/W
0
3
STOC
R/W
0
2
1
0
STPOL STDPX STCCLR
R/W
R/W
R/W
0
0
0
STM1~STM0:STM 工作模式选择位
00:比较匹配输出模式
01:捕捉输入模式
10:PWM 输出模式或单脉冲输出模式
11:定时 / 计数器模式
这两位设置 STM 需要的工作模式。为了确保操作可靠,STM 应在 STM1 和
STM0 位有任何改变前先关掉。在定时 / 计数器模式,STM 输出引脚状态未定义。
95
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Rev. 1.10
Bit 5~4
STIO1~STIO0:STM STP 或 STPI 引脚功能选择位
比较匹配输出模式
00:无变化
01:输出低
10:输出高
11:输出翻转
PWM 输出模式 / 单脉冲输出模式
00:强制无效状态
01:强制有效状态
10:PWM 输出
11:单脉冲输出
捕捉输入模式
00:在 STPI 上升沿输入捕捉
01:在 STPI 下降沿输入捕捉
10:在 STPI 双沿输入捕捉
11:输入捕捉除能
定时 / 计数器模式
未使用
此两位用于决定在满足特定条件时 STM 外部引脚如何改变状态。这两位值的选
择取决于 STM 运行在哪种工作模式。
在比较匹配输出模式下,STIO1 和 STIO0 位决定当从比较器 A 比较匹配输出发
生时 STM 输出脚 STP 如何改变状态。当从比较器 A 比较匹配输出发生时 STP
输出脚能设为切换高、切换低或翻转当前状态。若此两位同时为 0 时,这个输
出将不会改变。STP 输出脚的初始值通过 STMC1 寄存器的 STOC 位设置取得。
注意,由 STIO1 和 STIO0 位得到的输出电平必须与通过 STOC 位设置的初始值
不同,否则当比较匹配发生时,STP 输出脚将不会发生变化。在 STP 输出脚改
变状态后,通过 STON 位由低到高电平的转换复位至初始值。
在 PWM 输出模式,STIO1 和 STIO0 决定比较匹配条件发生时怎样改变 STM 输
出脚的状态。PWM 输出功能通过这两位的变化进行更新。仅在 STM 关闭时改
变 STIO1 和 STIO0 位 的 值 是 很 有 必 要 的。 若 在 STM 运 行 时 改 变 STIO1 和
STIO0 的值,PWM 输出的值将无法预料。
Bit 3
STOC:STM 输出脚 STP 输出控制位
比较匹配输出模式
0:初始低
1:初始高
PWM 输出模式 / 单脉冲输出模式
0:低有效
1:高有效
这是 STM 输出脚输出控制位。它取决于 STM 此时正运行于比较匹配输出模式
还是 PWM 输出模式 / 单脉冲输出模式。若 STM 处于定时 / 计数器模式,则其
不受影响。在比较匹配输出模式时,比较匹配发生前其决定 STM 输出脚 STP 的
逻辑电平值。在 PWM 输出模式 / 单脉冲输出模式时,其决定输出信号是高有效
还是低有效。
Bit 2
STPOL:STP 输出脚输出极性控制位
0:同相
1:反相
此位控制 STP 输出脚的极性。此位为高时 STP 输出脚反相,为低时 STP 输出脚
同相。若 STM 处于定时 / 计数器模式时其不受影响。
96
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 1
STDPX:STM PWM 周期 / 占空比控制位
0:CCRP - 周期;CCRA - 占空比
1:CCRP - 占空比;CCRA - 周期
此位决定 CCRA 与 CCRP 寄存器哪个被用于 PWM 波形的周期和占空比控制。
Bit 0
STCCLR:选择 STM 计数器清零条件位
0:STM 比较器 P 匹配
1:STM 比较器 A 匹配
此位用于选择清除计数器的方法。标准型 TM 包括两个比较器 - 比较器 A 和比
较器 P。这两个比较器每个都可以用于清除内部计数器。STCCLR 位设为高,
计数器在比较器 A 比较匹配发生时被清除;此位设为低,计数器在比较器 P 比
较匹配发生或计数器溢出时被清除。计数器溢出清除的方法仅在 CCRP 被清除
为 0 时才能生效。STCCLR 位在 PWM 输出模式、单脉冲输出模式或输入捕捉
模式时未使用。
STMDL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R
0
6
D6
R
0
5
D5
R
0
4
D4
R
0
3
D3
R
0
2
D2
R
0
1
D1
R
0
0
D0
R
0
3
D11
R
0
2
D10
R
0
1
D9
R
0
0
D8
R
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
3
D11
R/W
0
2
D10
R/W
0
1
D9
R/W
0
0
D8
R/W
0
STM 计数器低字节寄存器 bit7~bit0
STM 16-bit 计数器 bit7~bit0
STMDH 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D15
R
0
6
D14
R
0
5
D13
R
0
4
D12
R
0
STM 计数器高字节寄存器 bit7~bit0
STM 16-bit 计数器 bit15~bit8
STMAL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R/W
0
6
D6
R/W
0
5
D5
R/W
0
4
D4
R/W
0
STM CCRA 低字节寄存器 bit7~bit0
STM 16-bit CCRA bit7~bit0
STMAH 寄存器
Bit
Name
R/W
POR
Bit 7~0
Rev. 1.10
7
D15
R/W
0
6
D14
R/W
0
5
D13
R/W
0
4
D12
R/W
0
STM CCRA 高字节寄存器 bit7~bit0
STM 16-bit CCRA bit15~bit8
97
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
STMRP 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R/W
0
6
D6
R/W
0
5
D5
R/W
0
4
D4
R/W
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
STM CCRP 寄存器 bit7~bit0
STM CCRP 8-bit 寄存器,与 STM 计数器 bit15~bit8 比较。
比较器 P 匹配周期
0:65536 个 STM 时钟周期
1~255:(1~255) ×256 个 STM 时钟周期
此八位设定内部 CCRP 8-bit 寄存器的值,然后与内部计数器的高八位进行比较。
如果 STCCLR 位设为 0 时,此比较结果可用于清零内部计数器。STCCLR 位设
为低,CCRP 比较匹配结果将重置内部计数器。由于 CCRP 只与计数器高八位
比较,比较结果是 256 时钟周期的倍数。CCRP 被清零时,实际上会使得计数
器在最大值溢出。
标准型 TM 工作模式
标准型 TM 有五种工作模式,即比较匹配输出模式,PWM 输出模式,单脉冲
输出模式,捕捉输入模式或定时 / 计数器模式。通过设置 STMC1 寄存器的
STM1 和 STM0 位选择任意模式。
比较匹配输出模式
为 使 TM 工 作 在 此 模 式,STMC1 寄 存 器 中 的 STM1 和 STM0 位 需 要 设 置 为
“00”。当工作在该模式,一旦计数器使能并开始计数,有三种方法来清零,
分别是:计数器溢出,比较器 A 比较匹配发生和比较器 P 比较匹配发生。当
STCCLR 位为低,有两种方法清除计数器。一种是比较器 P 比较匹配发生,另
一种是 CCRP 所有位设置为零并使得计数器溢出。此时,比较器 A 和比较器 P
的请求标志位 STMAF 和 STMPF 将分别置位。
如果 STMC1 寄存器的 STCCLR 位设置为高,当比较器 A 比较匹配发生时计数
器 被 清 零。 此 时, 即 使 CCRP 寄 存 器 的 值 小 于 CCRA 寄 存 器 的 值, 仅 产 生
STMAF 中断请求标志。所以当 STCCLR 为高时,不会产生 STMPF 中断请求标
志。在比较匹配输出模式下,CCRA 不能设为“0”。
如果 CCRA 位都清除为零,当计数器的值达到 16 位最大值 FFFFH 时将溢出,
但此时不会产生 STMAF 中断请求标志。
正如该模式名所言,当比较匹配发生后,STM 输出脚状态改变。当比较器 A 比
较匹配发生后 STMAF 标志产生时,STM 输出脚状态改变。比较器 P 比较匹配
发生时产生的 STMPF 标志不影响 STM 输出脚。STM 输出脚状态改变方式由
STMC1 寄 存 器 中 STIO1 和 STIO0 位 决 定。 当 比 较 器 A 比 较 匹 配 发 生 时,
STIO1 和 STIO0 位决定 STM 输出脚输出高、低或翻转当前状态。STM 输出脚
初 始 值, 在 STON 位 由 低 到 高 电 平 的 变 化 后 通 过 STOC 位 设 置。 注 意, 若
STIO1 和 STIO0 位同时为 0 时,引脚输出不变。
Rev. 1.10
98
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter overflow
Counter Value
0xFFFF
STCCLR = 0; STM [1:0] = 00
CCRP > 0
Counter cleared by CCRP value
CCRP=0
CCRP > 0
Counter
Restart
Resume
CCRP
Pause
CCRA
Stop
Time
STON
STPAU
STPOL
CCRP Int. flag
STMPF
CCRA Int. flag
STMAF
STM O/P Pin
Output pin set to
initial Level Low
if STOC=0
Output not affected by
STMAF flag. Remains High
until reset by STON bit
Output Toggle with
STMAF flag
Here STIO [1:0] = 11
Toggle Output select
Note STIO [1:0] = 10
Active High Output select
Output Inverts
when STPOL is high
Output Pin
Reset to Initial value
Output controlled by other
pin-shared function
比较匹配输出模式 – STCCLR=0
注:1. STCCLR=0,比较器 P 匹配将清除计数器
2. STM 输出脚仅由 STMAF 标志位控制
3. 在 STON 上升沿 STM 输出脚复位至初始值
Rev. 1.10
99
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
STCCLR = 1; STM [1:0] = 00
CCRA = 0
Counter overflow
CCRA > 0 Counter cleared by CCRA value
0xFFFF
CCRA=0
Resume
CCRA
Pause
Stop
Counter Restart
CCRP
Time
STON
STPAU
STPOL
No STMAF flag
generated on
CCRA overflow
CCRA Int. flag
STMAF
CCRP Int. flag
STMPF
STMPF not
generated
Output does
not change
STM O/P Pin
Output pin set to
initial Level Low if
STOC=0
Output not affected by STMAF
flag. Remains High until reset by
STON bit
Output Toggle with
STMAF flag
Here STIO [1:0] = 11
Toggle Output select
Note STIO [1:0] = 10 Active
High Output select
Output Inverts
when STPOL is high
Output Pin
Reset to Initial value
Output controlled by other
pin-shared function
比较匹配输出模式 – STCCLR=1
注:1. STCCLR=1,比较器 A 匹配将清除计数器
2. STM 输出脚仅由 STMAF 标志位控制
3. 在 STON 上升沿 TM 输出脚复位至初始值
4. 当 STCCLR=1 时,不会产生 STMPF 标志
Rev. 1.10
100
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
定时 / 计数器模式
为使 STM 工作在此模式,STMC1 寄存器中的 STM1 和 STM0 位需要设置为
“11”。定时 / 计数器模式与比较输出模式操作方式相同,并产生同样的中断
请求标志。不同的是,在定时 / 计数器模式下 STM 输出脚未使用。因此,比较
匹配输出模式中的描述和时序图可以适用于此功能。该模式中未使用的 STM 输
出脚用作普通 I/O 脚或其它功能。
PWM 输出模式
为使 STM 工作在此模式,STMC1 寄存器中的 STM1 和 STM0 位需要设置为
“10”,且 STIO1 和 STIO0 位也需要设置为“10”。STM 的 PWM 功能在马
达控制,加热控制,照明控制等方面十分有用。给 STM 输出脚提供一个频率固
定但占空比可调的信号,将产生一个有效值等于 DC 均方根的 AC 方波。
由于 PWM 波形的周期和占空比可调,其波形的选择就较为灵活。在 PWM 输
出模式中,STCCLR 位不影响 PWM 周期。CCRA 和 CCRP 寄存器决定 PWM
波形,一个用来清除内部计数器并控制 PWM 波形的频率,另一个用来控制占
空比。哪个寄存器控制频率或占空比取决于 STMC1 寄存器的 STDPX 位。所以
PWM 波形由 CCRA 和 CCRP 寄存器共同决定。
当比较器 A 或比较器 P 比较匹配发生时,将产生 CCRA 或 CCRP 中断标志。
STMC1 寄存器中的 STOC 位决定 PWM 波形的极性,STIO1 和 STIO0 位使能
PWM 输出或将 STM 输出脚置为逻辑高或逻辑低。STPOL 位对 PWM 输出波形
的极性取反。
● 16-bit STM,PWM 输出模式,边沿对齐模式,STDPX=0
CCRP
Period
Duty
1~255
CCRP×256
0
65536
CCRA
若 fSYS=16MHz,STM 时钟源选择 fSYS/4,CCRP=2,CCRA=128,
STM PWM 输出频率 =(fSYS/4)/(2×256)= fSYS/2048=8kHz,duty=128/(2×256)=25%
若由 CCRA 寄存器定义的 Duty 值等于或大于 Period 值,PWM 输出占空比为
100%
● 16-bit STM,PWM 输出模式,边沿对齐模式,STDPX=1
CCRP
Period
Duty
1~255
0
CCRA
CCRP×256
65536
PWM 的输出周期由 CCRA 寄存器的值与 STM 的时钟共同决定,PWM 的占空
比由 CCRP×256(除了 CCRP 为“0”外)的值决定。
Rev. 1.10
101
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
STDPX = 0; STM [1:0] = 10
Counter cleared by
CCRP
Counter Reset when
STON returns high
CCRP
Pause
Resume
Counter Stop if
STON bit low
CCRA
Time
STON
STPAU
STPOL
CCRA Int.
flag STMAF
CCRP Int.
flag STMPF
STM O/P Pin
(STOC=1)
STM O/P Pin
(STOC=0)
PWM Duty Cycle set
by CCRA
PWM Period
set by CCRP
PWM resumes
operation
Output controlled by other pinOutput Inverts
shared function
when STPOL = 1
PWM 输出模式 – STDPX=0
注:1. STDPX=0,计数器由 CCRP 清除
2. 计数器清零并设置 PWM 周期
3. 即使当 STIO[1:0]=00 或 01,内部 PWM 功能不变
4. STCCLR 位对 PWM 操作无影响
Rev. 1.10
102
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
STDPX = 1; STM [1:0] = 10
Counter cleared by
CCRA
Counter Reset when
STON returns high
CCRA
Pause
Resume
Counter Stop if
STON bit low
CCRP
Time
STON
STPAU
STPOL
CCRP Int. flag
STMPF
CCRA Int. flag
STMAF
STM O/P Pin
(STOC=1)
STM O/P Pin
(STOC=0)
PWM Duty Cycle
set by CCRP
PWM Period
set by CCRA
PWM resumes
operation
Output controlled by other
Output Inverts
pin-shared function
when STPOL = 1
PWM 输出模式 – STDPX=1
注:1. STDPX=1,计数器由 CCRA 清除
2. 计数器清零设置 PWM 周期
3. 即使当 STIO[1:0]=00 或 01,内部 PWM 功能不变
4. STCCLR 对 PWM 操作无影响
Rev. 1.10
103
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
单脉冲输出模式
为使 STM 工作在此模式,STMC1 寄存器中的 STM1 和 STM0 位需要设置为
“10”,同时 STIO1 和 STIO0 位需要设置为“11”。正如模式名所言,单脉冲
输出模式,在 STM 输出脚将产生一个脉冲输出。
脉冲输出可以通过应用程序控制 STON 位由低到高的转变来触发。而处于单脉
冲输出模式时,STON 位可在 STCK 脚发生有效边沿跳转时自动由低转变为高,
进而开始单脉冲输出。当 STON 位转变为高电平时,计数器将开始运行,并产
生脉冲前沿。当脉冲有效时 STON 位保持高电平。通过应用程序使 STON 位清
零或比较器 A 比较匹配发生时,产生脉冲后沿。
然而,比较器 A 比较匹配发生时,会自动清除 STON 位并产生单脉冲输出边沿
跳转。CCRA 的值通过这种方式控制脉冲宽度。比较器 A 比较匹配发生时,也
会产生 STM 中断。STON 位在计数器重启时会发生由低到高的转变,此时计数
器才复位至零。在单脉冲输出模式中,CCRP 寄存器,STCCLR 和 STDPX 位未
使用。
S/W Command
SET“STON”
or
STCK Pin
Transition
CCRA
Leading Edge
CCRA
Trailing Edge
STON bit
0à1
STON bit
1à0
S/W Command
CLR“STON”
or
CCRA Compare
Match
STP Output Pin
Pulse Width = CCRA Value
单脉冲产生示意图
Rev. 1.10
104
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
STM [1:0] = 10 ; STIO [1:0] = 11
Counter stopped by
CCRA
Counter Reset when
STON returns high
CCRA
Pause
Counter Stops by
software
Resume
CCRP
Time
STON
Software
Trigger
Cleared by
CCRA match
Auto. set by
STCK pin
STCK pin
Software
Trigger
Software
Trigger
Software
Clear
Software
Trigger
STCK pin
Trigger
STPAU
STPOL
No CCRP Interrupts
generated
CCRP Int. Flag
STMPF
CCRA Int. Flag
STMAF
STM O/P Pin
(STOC=1)
STM O/P Pin
(STOC=0)
Output Inverts
when STPOL = 1
Pulse Width set
by CCRA
单脉冲输出模式
注:1. 通过 CCRA 匹配停止计数器
2. CCRP 未使用
3. 通过 STCK 脚或设置 STON 位为高来触发脉冲
4. STCK 脚有效沿会自动置高 STON 位
5. 单脉冲输出模式中,STIO[1:0] 需置位“11”,且不能更改。
Rev. 1.10
105
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
捕捉输入模式
为使 STM 工作在此模式,STMC1 寄存器中的 STM1 和 STM0 位需要设置为
“01”。此模式使能外部信号捕捉并保存内部计数器当前值,因此被用于诸如
脉冲宽度测量的应用中。STPI 脚上的外部信号,通过设置 STMC1 寄存器的
STIO1 和 STIO0 位选择有效边沿类型,即上升沿,下降沿或双沿有效。通过应
用程序将 STON 位由低置为高时,计数器启动。
当 STPI 脚出现有效边沿转换时,计数器当前值被锁存到 CCRA 寄存器,并产
生 STM 中断。无论 STPI 引脚发生哪种边沿转换,计数器继续工作直到 STON
位发生下降沿跳变。当 CCRP 比较匹配发生时计数器复位至零;通过这种方式
CCRP 的值可控制计数器的最大值。当比较器 P CCRP 比较匹配发生时,也会
产生 STM 中断。记录 CCRP 溢出中断信号的值可以测量长脉宽。通过设置
STIO1 和 STIO0 位选择 STPI 引脚为上升沿,下降沿或双沿有效。如果 STIO1
和 STIO0 都设置为高,无论 STPI 引脚发生哪种边沿转换都不会产生捕捉操作,
但计数器仍会继续运行。STCCLR 和 STDPX 位在此模式中未使用。
Rev. 1.10
106
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
STM [1:0] = 01
Counter cleared by
CCRP
Counter
Stop
Counter
Reset
CCRP
Resume
YY
Pause
XX
Time
STON
STPAU
Active
edge
Active
edge
Active edge
STM Capture
Pin STPI
CCRA Int. Flag
STMAF
CCRP Int. Flag
STMPF
XX
CCRA Value
STIO [1:0] Value
00 – Rising edge
YY
01 – Falling edge
XX
10 – Both edges
YY
11 – Disable Capture
捕捉输入模式
注:1. STM1,STM0=01 并通过 STIO1 和 STIO0 位设置有效边沿
2. STM 捕捉输入脚的有效边沿将计数器的值转移到 CCRA 中
3. STCCLR 位未使用
4. 无输出功能 – STOC 和 STPOL 位未使用
5. 计数器值由 CCRP 决定,在 CCRP 为“0”时,计数器计数值可达最大
Rev. 1.10
107
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
周期型 TM – PTM
周期型 TM 包括 5 种工作模式,即比较匹配输出、定时 / 事件计数器、捕捉输入、
单脉冲输出和 PWM 输出模式。周期型 TM 由两个外部输入脚控制并驱动两个
外部输出脚。
PTM 核心
10-bit PTM
PTM 输入引脚
PTCK,PTPI
PTM 输出引脚
PTP,PTPB
CCRP
fSYS/4
fSYS
fH/16
fH/64
fSUB
fSUB
001
PTMPF Interrupt
011
10-bit Count-up Counter
100
101
PTOC
b0~b9
010
110
PTCK
Comparator P Match
10-bit Comparator P
000
PTON
PTPAU
111
PTCK2~PTCK0
Counter Clear
PTCCLR
b0~b9
10-bit Comparator A
Output
Control
Polarity
Control
Pin
Control
PTM1, PTM0
PTIO1, PTIO0
PTPOL
PxSn
0
1
Comparator A Match
CCRA
PTIO1, PTIO0
PTCAPTS
Edge
Detector
0
1
PTP
PTPB
PTMAF Interrupt
PxSn IFSi
Pin
Control
PTPI
周期型 TM 方框图
周期型 TM 操作
周期型 TM 是 10 位宽度。周期型 TM 核心是一个由用户选择的内部或外部时钟
源驱动的 10 位向上计数器,它还包括两个内部比较器即比较器 A 和比较器 P。
这两个比较器将计数器的值与 CCRA 和 CCRP 寄存器中的值进行比较。CCRP
和 CCRA 是 10 位的,与计数器的所有位比较。
通过应用程序改变 10 位计数器值的唯一方法是使 PTON 位发生上升沿跳变清
除计数器。此外,计数器溢出或比较匹配也会自动清除计数器。上述条件发生
时,通常情况会产生 PTM 中断信号。周期型 TM 可工作在不同的模式,可由包
括来自输入脚的不同时钟源驱动,也可以控制输出脚。所有工作模式的设定都
是通过设置相关寄存器来实现的。
Rev. 1.10
108
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
周期型 TM 寄存器介绍
周期型 TM 的所有操作由一系列寄存器控制。一对只读寄存器用来存放 10 位计
数器的值,两对读 / 写寄存器存放 10 位 CCRA 和 CCRP 的值。剩下两个控制寄
存器用来设置不同的操作和控制模式。
位
寄存器
名称
7
6
5
4
3
2
1
0
PTMC0 PTPAU PTCK2 PTCK1 PTCK0 PTON
─
─
─
PTMC1 PTM1 PTM0 PTIO1 PTIO0 PTOC PTPOL PTCAPTS PTCCLR
PTMDL
D7
D6
D5
D4
D3
D2
D1
D0
PTMDH
─
─
─
─
─
─
D9
D8
PTMAL
D7
D6
D5
D4
D3
D2
D1
D0
PTMAH
─
─
─
─
─
─
D9
D8
PTMRPL PTRP7 PTRP6 PTRP5 PTRP4 PTRP3 PTRP2
PTRP1
PTRP0
PTMRPH
─
─
─
─
─
─
PTRP9
PTRP8
10-bit 周期型 TM 寄存器列表
PTMC0 寄存器
Bit
Name
R/W
POR
Bit 7
Bit 6~4
Rev. 1.10
7
6
5
4
PTPAU PTCK2 PTCK1 PTCK0
R/W
R/W
R/W
R/W
0
0
0
0
3
PTON
R/W
0
2
─
─
─
1
─
─
─
0
─
─
─
PTPAU:PTM 计数器暂停控制位
0:运行
1:暂停
通过设置此位为高可使计数器暂停,清零此位恢复正常计数器操作。当处于暂
停条件时,PTM 保持上电状态并继续耗电。当此位由低到高转变时,计数器将
保留其剩余值,直到此位再次改变为低电平,并从此值开始继续计数。
PTCK2~PTCK0:选择 PTM 计数时钟位
000:fSYS/4
001:fSYS
010:fH/16
011:fH/64
100:fSUB
101:fSUB
110:PTCK 上升沿
111:PTCK 下降沿
此三位用于选择 PTM 的时钟源。外部引脚时钟源能被选择在上升沿或下降沿有效。
fSYS 是系统时钟,fH 和 fSUB 是其它的内部时钟源,细节方面请参考振荡器章节
Bit 3
PTON:PTM 计数器 On/Off 控制位
0:Off
1:On
此位控制 PTM 的总开关功能。设置此位为高则使能计数器使其运行,清零此位
则除能 PTM。清零此位将停止计数器并关闭 PTM 减少耗电。当此位经由低到
高转变时,内部计数器将复位清零;当此位经由高到低转换时,内部计数器将
保持其剩余值,直到此位再次改变为高电平。
若 PTM 处于比较匹配输出模式时,当 PTON 位经由低到高转换时,PTM 输出
脚将复位至 PTOC 位指定的初始值。
Bit 2~0
未定义,读为“0”
109
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
PTMC1 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
PTM1
R/W
0
6
PTM0
R/W
0
5
PTIO1
R/W
0
4
PTIO0
R/W
0
3
PTOC
R/W
0
2
1
0
PTPOL PTCAPTS PTCCLR
R/W
R/W
R/W
0
0
0
Bit 7~6
PTM1~PTM0:PTM 工作模式选择位
00:比较匹配输出模式
01:捕捉输入模式
10:PWM 输出模式或单脉冲输出模式
11:定时 / 计数器模式
这两位设置 PTM 需要的工作模式。为了确保操作可靠,PTM 应在 PTM1 和
PTM0 位有任何改变前先关掉。在定时 / 计数器模式,PTM 输出脚状态未定义。
Bit 5~4
PTIO1~PTIO0:PTM 引脚功能选择位
比较匹配输出模式
00:无变化
01:输出低
10:输出高
11:输出翻转
PWM 输出模式 / 单脉冲输出模式
00:PWM 输出无效状态
01:PWM 输出有效状态
10:PWM 输出
11:单脉冲输出
捕捉输入模式
00:在 PTPI 或 PTCK 上升沿输入捕捉
01:在 PTPI 或 PTCK 下降沿输入捕捉
10:在 PTPI 或 PTCK 双沿输入捕捉
11:输入捕捉除能
定时 / 计数器模式
未使用
此两位用于决定在一定条件达到时 PTM 输出如何改变状态。这两位值的选择取
决于 PTM 运行在哪种模式下。
在比较匹配输出模式下,PTIO1 和 PTIO0 位决定当从比较器 A 比较匹配输出发
生时 PTM 输出脚如何改变状态。当从比较器 A 比较匹配输出发生时 PTM 输出
脚能设为切换高、切换低或翻转当前状态。若此两位同时为 0 时,这个输出将
不会改变。PTM 输出脚的初始值通过 PTMC1 寄存器的 PTOC 位设置取得。注意,
由 PTIO1 和 PTIO0 位得到的输出电平必须与通过 PTOC 位设置的初始值不同,
否则当比较匹配发生时,PTM 输出脚将不会发生变化。在 PTM 输出脚改变状
态后,通过 PTON 位由低到高电平的转换复位至初始值。
在 PWM 输出模式,PTIO1 和 PTIO0 用于决定比较匹配条件发生时怎样改变
PTM 输出脚的状态。PWM 输出功能通过这两位的变化进行更新。仅在 PTM 关
闭时改变 PTIO1 和 PTIO0 位的值是很有必要的。若在 PTM 运行时改变 PTIO1
和 PTIO0 的值,PWM 输出的值是无法预料的。
110
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 3
PTOC:PTM PTP 输出控制位
比较匹配输出模式
0:初始低
1:初始高
PWM 输出模式 / 单脉冲输出模式
0:低有效
1:高有效
这是 PTM 输出脚输出控制位。它取决于 PTM 此时正运行于比较匹配输出模式
还是 PWM 输出模式 / 单脉冲输出模式。若 PTM 处于定时 / 计数器模式,则其
不受影响。在比较匹配输出模式时,比较匹配发生前其决定 PTM 输出脚的逻辑
电平值。在 PWM 输出模式时,其决定 PWM 信号是高有效还是低有效。
Bit 2
PTPOL:PTM PTP 输出极性控制位
0:同相
1:反相
此位控制 PTP 输出脚的极性。此位为高时 PTM 输出脚反相,为低时 PTM 输出
脚同相。若 PTM 处于定时 / 计数器模式时其不受影响。
Bit 1
PTCAPTS:选择 PTM 捕捉触发源
0:来自 PTPI 引脚
1:来自 PTCK 引脚
Bit 0
PTCCLR:选择 PTM 计数器清零条件位
0:PTM 比较器 P 匹配
1:PTM 比较器 A 匹配
此位用于选择清除计数器的方法。周期型 PTM 包括两个比较器 - 比较器 A 和比
较器 P,两者都可以用作清除内部计数器。PTCCLR 位设为高,计数器在比较
器 A 比较匹配发生时被清除;此位设为低,计数器在比较器 P 比较匹配发生或
计数器溢出时被清除。计数器溢出清除的方法仅在 CCRP 被清除为 0 时才能生
效。PTCCLR 位在 PWM 输出模式、单脉冲输出或输入捕捉模式时未使用。
PTMDL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R
0
6
D6
R
0
5
D5
R
0
4
D4
R
0
3
D3
R
0
2
D2
R
0
1
D1
R
0
0
D0
R
0
3
─
─
─
2
─
─
─
1
D9
R
0
0
D8
R
0
PTM 计数器低字节寄存器 bit 7 ~ bit 0
PTM 10-bit 计数器 bit 7 ~ bit 0
PTMDH 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
Bit 7~2
未定义,读为“0”
Bit 1~0
PTM 计数器高字节寄存器 bit 1 ~ bit 0
PTM 10-bit 计数器 bit 9 ~ bit 8
111
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
PTMAL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
D7
R/W
0
6
D6
R/W
0
5
D5
R/W
0
4
D4
R/W
0
3
D3
R/W
0
2
D2
R/W
0
1
D1
R/W
0
0
D0
R/W
0
3
─
─
─
2
─
─
─
1
D9
R/W
0
0
D8
R/W
0
3
PTRP3
R/W
0
2
PTRP2
R/W
0
1
PTRP1
R/W
0
0
3
─
─
─
2
─
─
─
1
PTRP9
R/W
0
PTM CCRA 低字节寄存器 bit 7 ~ bit 0
PTM 10-bit CCRA bit 7 ~ bit 0
PTMAH 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
Bit 7~2
未定义,读为“0”
Bit 1~0
PTM CCRA 高字节寄存器 bit 1 ~ bit 0
PTM 10-bit CCRA bit 9 ~ bit 8
PTMRPL 寄存器
Bit
Name
R/W
POR
Bit 7~0
7
PTRP7
R/W
0
6
PTRP6
R/W
0
5
PTRP5
R/W
0
4
PTRP4
R/W
0
PTRP0
R/W
0
PTM CCRP 低字节寄存器 bit 7 ~ bit 0
PTM 10-bit CCRP bit 7 ~ bit 0
PTMRPH 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
Bit 7~2
未定义,读为“0”
Bit 1~0
PTM CCRP 高字节寄存器 bit 1 ~ bit 0
PTM 10-bit CCRP bit 9 ~ bit 8
112
0
PTRP8
R/W
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
周期型 TM 工作模式
周期型 TM 有五种工作模式,即比较匹配输出模式、PWM 输出模式、单脉冲
输出模式、捕捉输入模式或定时 / 计数器模式。通过设置 PTMC1 寄存器的
PTM1 和 PTM0 位选择任意模式。
比较匹配输出模式
为使 PTM 工作在此模式,PTMC1 寄存器的 PTM1 和 PTM0 位需要设置为“00”。
当工作在该模式,一旦计数器使能并开始计数,有三种方法来清零,分别是:
计数器溢出,比较器 A 比较匹配发生和比较器 P 比较匹配发生。当 PTCCLR 位
为低,有两种方法清除计数器。一种是比较器 P 比较匹配发生,另一种是
CCRP 所有位设置为零并使得计数器溢出。此时,比较器 A 和比较器 P 的请求
标志位 PTMAF 和 PTMPF 将分别置起。
如果 PTMC1 寄存器的 PTCCLR 位设置为高,当比较器 A 比较匹配发生时计数
器被清零。此时,即使 CCRP 寄存器的值小于 CCRA 寄存器的值,仅 PTMAF
中断请求标志产生。所以当 PTCCLR 为高时,不会产生 PTMPF 中断请求标志。
在比较匹配输出模式中,CCRA 寄存器值不能设为“0”。
正如该模式名所言,当比较匹配发生后,PTM 输出脚状态改变。当比较器 A 比
较匹配发生后 PTMAF 中断请求标志产生时,PTM 输出脚状态改变。比较器 P
比较匹配发生时产生的 PTMPF 标志不影响 PTM 输出脚。PTM 输出脚状态改变
方式由 PTMC1 寄存器中 PTIO1 和 PTIO0 位决定。当比较器 A 比较匹配发生时,
PTIO1 和 PTIO0 位决定 PTM 输出脚输出高,低或翻转当前状态。PTM 输出脚
初 始 值, 在 PTON 位 由 低 到 高 电 平 的 变 化 后 通 过 PTOC 位 设 置。 注 意, 若
PTIO1 和 PTIO0 位同时为 0 时,引脚输出不变。
Rev. 1.10
113
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
Counter overflow
CCRP > 0
Counter cleared by CCRP value
CCRP=0
0x3FF
CCRP > 0
PTCCLR = 0; PTM[1:0] = 00
Counter
Restart
Resume
CCRP
Pause
CCRA
Stop
Time
PTON
PTPAU
PTPOL
CCRP Int. Flag
PTMPF
CCRA Int. Flag
PTMAF
PTM O/P Pin
Output pin set to
initial Level Low if
PTOC=0
Output not affected by PTMAF
flag. Remains High until reset by
PTON bit
Output Toggle with
PTMAF flag
Here PTIO [1:0] = 11
Toggle Output select
Note PTIO [1:0] = 10 Active
High Output select
Output Inverts
when PTPOL is high
Output Pin
Reset to Initial value
Output controlled by other
pin-shared function
比较器匹配输出模式 – PTCCLR = 0
注:1 PTCCLR=0,比较器 P 匹配将清除计数器
2. PTM 输出脚仅由 PTMAF 标志位控制
3. 在 PTON 上升沿 PTM 输出脚复位至初始值
Rev. 1.10
114
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
PTCCLR = 1; PTM[1:0] = 00
CCRA = 0
Counter overflow
CCRA > 0 Counter cleared by CCRA value
0x3FF
CCRA=0
Resume
CCRA
Stop
Pause
Counter Restart
CCRP
Time
PTON
PTPAU
PTPOL
No PTMAF flag
generated on
CCRA overflow
CCRA Int. Flag
PTMAF
CCRP Int. Flag
PTMPF
PTMPF not
generated
Output does
not change
PTM O/P Pin
Output pin set
to initial Level
Low if PTOC=0
Output not affected by
PTMAF flag. Remains High
until reset by PTON bit
Output Toggle with
PTMAF flag
Here PTIO [1:0] = 11
Toggle Output select
Note PTIO [1:0] = 10
Active High Output select
Output Inverts
when PTPOL is high
Output Pin
Reset to Initial value
Output controlled by other
pin-shared function
比较器匹配输出模式 – PTCCLR = 1
注:1. PTCCLR=1,比较器 P 匹配将清除计数器
2. PTM 输出脚仅由 PTMAF 标志位控制
3. 在 PTON 上升沿 PTM 输出脚复位至初始值
4. 当 PTCCLR=1 时,不会产生 PTMPF 标志位
Rev. 1.10
115
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
定时 / 计数器模式
为使 PTM 工作在此模式,PTMC1 寄存器的 PTM1 和 PTM0 位需要设置为“11”。
定时 / 计数器模式与比较输出模式操作方式相同,并产生同样的中断请求标志。
不同的是,在定时 / 计数器模式下 PTM 输出脚未使用。因此,比较匹配输出模
式中的描述和时序图可以适用于此功能。该模式中未使用的 PTM 输出脚用作普
通 I/O 脚或其它功能。
PWM 输出模式
为使 PTM 工作在此模式,PTMC1 寄存器的 PTM1 和 PTM0 位需要设置为“10”,
且 PTIO1 和 PTIO0 位也需要设置为“10”。PTM 的 PWM 功能在马达控制,
加热控制,照明控制等方面十分有用。给 PTM 输出脚提供一个频率固定但占空
比可调的信号,将产生一个有效值等于 DC 均方根的 AC 方波。
由于 PWM 波形的周期和占空比可调,其波形的选择就较为灵活。在 PWM 模
式 中,PTCCLR 位 对 PWM 周 期 无 影 响。CCRP 和 CCRA 寄 存 器 都 用 于 控 制
PWM 方波。CCRP 寄存器通过清除内部计数从而控制 PWM 周期,CCRA 寄存
器设置 PWM 的占空比。PWM 波形的周期和占空比由 CCRP 和 CCRA 寄存器
的值控制。
当比较器 A 或比较器 P 比较匹配发生时,CCRA 和 CCRP 中断标志位分别产生。
PTMC1 寄 存 器 的 PTOC 位 选 择 PWM 波 形 的 极 性,PTIO1 和 PTIO0 位 使 能
PWM 输出或强制 PTM 输出脚为高电平或低电平。PTPOL 位用于 PWM 输出波
形的极性反相控制。
● 10-bit PTM,PWM 输出模式,边沿对齐
CCRP
Period
Duty
1~1023
1~1023
0
1024
CCRA
若 fSYS=16MHz,PTM 时钟源选择 fSYS/4,CCRP=512 且 CCRA=128,
PTM PWM 输出频率 =(fSYS/4) / 512=fSYS/2048= 8kHz,duty=128/512 =25%,
若由 CCRA 寄存器定义的 Duty 值等于或大于 Period 值,PWM 输出占空比为
100%。
Rev. 1.10
116
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
PTM[1:0] = 10
Counter cleared by
CCRP
Counter Reset when
PTON returns high
CCRP
Pause
Resume
Counter Stop if
PTON bit low
CCRA
Time
PTON
PTPAU
PTPOL
CCRA Int. Flag
PTMAF
CCRP Int. Flag
PTMPF
PTM O/P Pin
(PTOC=1)
PTM O/P Pin
(PTOC=0)
PWM Duty Cycle
set by CCRA
PWM Period
set by CCRP
Output controlled by other
pin-shared function
PWM resumes
operation
Output Inverts
When PTPOL = 1
PWM 输出模式
注:1. 计数器由 CCRP 清除
2. 计数器清零设置 PWM 周期
3. 当 PTIO[1:0]=00 或 01,PWM 功能不变
4. PTCCLR 位对 PWM 功能无影响
Rev. 1.10
117
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
单脉冲输出模式
为使 PTM 工作在此模式,PTMC1 寄存器中的 PTM1 和 PTM0 位需要设置为
“10”,并且相应的 PTIO1 和 PTIO0 需要设置为“11”。正如模式名所言,单
脉冲输出模式,在 PTM 输出脚将产生一个脉冲输出。
通过应用程序控制 PTON 位由低到高的转变来触发脉冲前沿输出。而处于单脉
冲模式时,PTON 位可在 PTCK 脚发生有效边沿跳转时自动由低转变为高,进
而开始单脉冲输出。当 PTON 位转变为高电平时,计数器将开始运行,并产生
脉冲前沿。当脉冲有效时,PTON 位保持高电平。通过应用程序将 PTON 位清
零或比较器 A 比较匹配发生时,产生脉冲后沿。
而比较器 A 比较匹配发生时,会自动清除 PTON 位并产生单脉冲输出边沿跳变。
CCRA 的值通过这种方式控制脉冲宽度。比较器 A 比较匹配发生时,也会产生
PTM 中断。PTON 位在计数器重启时会发生由低到高的转变,此时计数器才复
位至零。在单脉冲模式中,CCRP 寄存器和 PTCCLR 位未使用。
S/W Command
SET“PTON”
or
PTCK Pin
Transition
CCRA
Leading Edge
CCRA
Trailing Edge
PTON bit
0à1
PTON bit
1à0
S/W Command
CLR“PTON”
or
CCRA Compare
Match
PTP Output Pin
Pulse Width = CCRA Value
单脉冲产生示意图
Rev. 1.10
118
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
PTM[1:0] = 10 ; PTIO[1:0] = 11
Counter stopped by
CCRA
Counter Reset when
PTON returns high
CCRA
Pause
Counter Stops by
software
Resume
CCRP
Time
PTON
Software
Trigger
Auto. set by
PTCK pin
Software
Trigger
Cleared by
CCRA match
PTCK pin
Software
Trigger
Software
Software Trigger
Clear
PTCK pin
Trigger
PTPAU
PTPOL
CCRP Int. Flag
PTMPF
No CCRP Interrupts
generated
CCRA Int. Flag
PTMAF
PTM O/P Pin
(PTOC=1)
PTM O/P Pin
(PTOC=0)
Output Inverts
when PTPOL = 1
Pulse Width set
by CCRA
单脉冲模式
注:1. 通过 CCRA 匹配停止计数器
2. CCRP 未使用
3. 通过 PTCK 脚或设置 PTON 位为高来触发脉冲
4. PTCK 脚有效沿会自动置位 PTON
5. 单脉冲模式中,PTIO[1:0] 需置位“11”,且不能更改。
Rev. 1.10
119
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
捕捉输入模式
为使 PTM 工作在此模式,PTMC1 寄存器的 PTM1 和 PTM0 位需要设置为“01”。
此模式使能外部信号捕捉并保存内部计数器当前值,因此被用于诸如脉冲宽度
测量的应用中。PTPI 或 PTCK 引脚上的外部信号,通过设置 PTMC1 寄存器的
PTCAPTS 位选择。可通过设置 PTMC1 寄存器的 PTIO1 和 PTIO0 位选择有效
边沿类型,即上升沿,下降沿或双沿有效。通过应用程序将 PTON 位由低到高
转变时,计数器启动。
当 PTPI 或 PTCK 引脚出现有效边沿转换时,计数器当前值被锁存到 CCRA 寄
存器,并产生 PTM 中断。无论 PTPI 或 PTCK 引脚发生哪种边沿转换,计数器
将继续工作直到 PTON 位发生下降沿跳变。当 CCRP 比较匹配发生时计数器复
位至零;CCRP 的值通过这种方式控制计数器的最大值。当比较器 P CCRP 比
较匹配发生时,也会产生 PTM 中断。记录 CCRP 溢出中断信号的值可以测量
长脉宽。通过设置 PTIO1 和 PTIO0 位选择 PTPI 或 PTCK 引脚为上升沿,下降
沿或双沿有效。如果 PTIO1 和 PTIO0 位都设置为高,无论 PTPI 或 PTCK 引脚
发生哪种边沿转换都不会产生捕捉操作,但计数器仍会继续运行。
当 PTPI 或 PTCK 引脚与其它功能共用,PTM 工作在输入捕捉模式时需多加注
意。这是因为如果引脚被设为输出,那么该引脚上的任何电平转变都可能执行
输入捕捉操作。PTCCLR,PTOC 和 PTPOL 位在此模式中未使用。
Rev. 1.10
120
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Counter Value
PTM[1:0] = 01
Counter cleared by
CCRP
Counter
Stop
Counter
Reset
CCRP
YY
Resume
Pause
XX
Time
PTON
PTPAU
Active
edge
Active
edge
Active edge
PTM Capture Pin
PTPI or PTCK
CCRA Int. Flag
PTMAF
CCRP Int. Flag
PTMPF
CCRA Value
PTIO [1:0] Value
XX
00 - Rising edge
YY
XX
01 - Falling edge 10 - Both edges
YY
11 - Disable Capture
捕捉输入模式
注:1. PTM[1:0]=01 并通过 PTIO[1:0] 位设置有效边沿
2. PTM 捕捉输入脚的有效边沿将计数器的值转移到 CCRA 中
3. PTCCLR 位未使用
4. 无输出功能 – PTOC 和 PTPOL 位未使用
5. 计数器值由 CCRP 决定,在 CCRP 为“0”时,计数器计数值可达最大
Rev. 1.10
121
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
A/D 转换器
对于大多数电子系统而言,处理现实世界的模拟信号是共同的需求。为了完全
由单片机来处理这些信号,首先需要通过 A/D 转换器将模拟信号转换成数字信
号。将 A/D 转换器电路集成入单片机,可有效的减少外部器件,随之而来,具
有降低成本和减少器件空间需求的优势。
A/D 转换器简介
此系列单片机包含一个多通道的 A/D 转换器,它们可以直接接入外部模拟信号
(来自传感器或其它控制信号)或内部模拟信号(电源电压或参考电压信号)
并直接将这些信号转换成 12 位的数字量。选择转换外部或内部模拟信号由
SAINS3~SAINS0 位和 SACS3~SACS0 位共同控制。注意若选择内部信号作为
A/D 转换器输入,外部输入通道的连接将自动断开,以防止错误发生。关于 A/D
转换器输入信号的详细描述可参考“A/D 转换寄存器介绍”和“A/D 转换器输
入信号”章节进行了解。
外部输入通道
内部模拟信号
实际输入信号选择位
SAINS3~SAINS0,
16: AN0~AN15 6: AVDD,AVDD/2,AVDD/4,VR,VR/2,VR/4
SACS3~SACS0
下图显示了 A/D 转换器内部结构和相关的寄存器。
AVDD
fSYS
Pin-shared
selection
SACS3~SACS0
AN0
SACKS2~
SACKS0
÷ 2N
(N=0~7)
ADCEN
AVSS
A/ D Clock
AN1
SADOL
A/D Converter
AN15
START
ADBZ
ADCEN
ADRFS
SADOH
A/D Data
Registers
A/D Converter
Reference Voltage
SAINS3~SAINS0
SAVRS1~SAVRS0
AVDD
AVDD/4
VR
VR /2
ADPGAEN
PGAIS
AVDD/2
ADVBGIN
VRI
VREFI
PGA
VR
AVDD VREF
VR /4
PGAGS1~PGAGS0
(Gain=1/1.667/2.5/3.333)
A/D 转换器结构
Rev. 1.10
122
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
A/D 转换寄存器介绍
A/D 转换器的所有工作由六个寄存器控制。一对只读寄存器来存放 12 位 ADC
数据的值。三个控制寄存器设置 A/D 转换器的操作和控制功能。另外一个寄存
器 VBGRC 用于控制 bandgap 参考电压的开启与关闭。
寄存器
名称
SADOL
(ADRFS=0)
SADOL
(ADRFS=1)
SADOH
(ADRFS=0)
SADOH
(ADRFS=1)
SADC0
SADC1
SADC2
VBGRC
位
7
6
5
4
3
2
1
0
D3
D2
D1
D0
—
—
—
—
D7
D6
D5
D4
D3
D2
D1
D0
D11
D10
D9
D8
D7
D6
D5
D4
—
—
—
—
D11
D10
D9
D8
START
ADBZ ADCEN ADRFS SACS3 SACS2 SACS1
SACS0
SAINS3 SAINS2 SAINS1 SAINS0
─
SACKS2 SACKS1 SACKS0
ADPGAEN
─
─
PGAIS SAVRS1 SAVRS0 PGAGS1 PGAGS0
─
─
─
─
─
─
─
VBGREN
A/D 转换寄存器列表
A/D 转换器数据寄存器 – SADOL,SADOH
对于具有 12 位 A/D 转换器的单片机,需要两个数据寄存器存放转换结果,一
个高字节寄存器 SADOH 和一个低字节寄存器 SADOL。在 A/D 转换完毕后,
单片机可以直接读取这些寄存器以获得转换结果。由于寄存器只使用了 16 位中
的 12 位,其数据存储格式由 SADC0 寄存器的 ADRFS 位控制,如下表所示。
D0~D11 是 A/D 换转数据结果位。未使用的位读为“0”。当 A/D 转换器除能时,
数据寄存器的值将保持不变。
ADRFS
0
1
7
6
5
D11 D10 D9
0
0
0
SADOH
4
3
2
1
D8 D7 D6 D5
0 D11 D10 D9
0
D4
D8
7
D3
D7
6
D2
D6
5
D1
D5
SADOL
4
3
D0 0
D4 D3
2
0
D2
1
0
D1
0
0
D0
A/D 数据寄存器
A/D 转换控制寄存器 – SADC0,SADC1,SADC2
寄存器 SADC0、SADC1 和 SADC2 用来控制 A/D 转换器的功能和操作。这些 8 位
的寄存器定义包括选择连接至内部 A/D 转换器的模拟通道,数据转换格式,A/D 时
钟源,并控制和监视 A/D 转换器的开始和转换结束状态。由于每个单片机只包含一
个实际的模数转换电路,因此这些外部和内部模拟信号只能单个的被发送到转换
器。SADC0 寄存器中的 SACS3~SACS0 位和 SADC1 寄存器中的 SAINS3~SAINS0
位用于选择某个外部模拟输入信号还是内部模拟信号被连接到 A/D 转换器。具体是
哪些信号及如何选择,可参考后面的“A/D 转换器输入信号”章节。
引脚共用功能控制寄存器的相关位用来定义 I/O 端口中的哪些引脚为 A/D 转换
器的模拟输入,哪些引脚不作为 A/D 转换输入。当引脚作为 A/D 输入时,其原
来的通用 I/O 功能或其它引脚共用功能移除,此外,其内部上拉电阻也将自动
断开。
Rev. 1.10
123
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● SADC0 寄存器
Rev. 1.10
Bit
7
6
5
4
Name
START
R/W
R/W
R
R/W
R/W
POR
0
0
0
0
3
2
1
0
SACS2
SACS1
SACS0
R/W
R/W
R/W
R/W
0
0
0
0
ADBZ ADCEN ADRFS SACS3
Bit 7
START:启动 A/D 转换位
0→1→0:启动 A/D 转换
0→1:复位 A/D 转换器并清除 ADBZ 位
1→0:启动 A/D 转换并置位 ADBZ 位
此位用于初始化 A/D 转换过程。通常此位为低,但如果设为高再被清零,将初
始化 A/D 转换过程。
Bit 6
ADBZ:A/D 转换忙碌标志位
0:A/D 转换结束或未开始转换
1:A/D 转换中
此只读位用于表明 A/D 转换过程是否完成。当 START 位由低变为高再变为低
时,ADBZ 位为高,表明 A/D 转换已初始化。A/D 转换结束后,此位被清零。
Bit 5
ADCEN:A/D 转换器功能使能控制位
0:除能
1:使能
此位控制 A/D 内部功能。该位被置高将使能 A/D 转换器。如果该位设为低将关
闭 A/D 转换器以降低功耗。当 A/D 转换除能时,A/D 数据寄存器 SADOH 和
SADOL 的内容不会改变。
Bit 4
ADRFS:A/D 转换数据格式选择位
0:A/D 转换数据格式 →SADOH=D[11:4]; SADOL=D[3:0]
1:A/D 转换数据格式 →SADOH=D[11:8]; SADOL=D[7:0]
此位控制存放在两个 A/D 数据寄存器中的 12 位 A/D 转换结果的格式。细节方
面请参考 A/D 数据寄存器章节。
Bit 3~0
SACS3~SACS0:A/D 转换器外部模拟通道输入选择位
0000:AN0
0001:AN1
0010:AN2
0011:AN3
0100:AN4
0101:AN5
0110:AN6
0111:AN7
1000:AN8
1001:AN9
1010:AN10
1011:AN11
1100:AN12
1101:AN13
1110:AN14
1111:AN15
124
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● SADC1 寄存器
Bit
Name
R/W
POR
7
6
5
4
SAINS3 SAINS2 SAINS1 SAINS0
R/W
R/W
R/W
R/W
0
0
0
0
3
─
─
─
2
1
0
SACKS2 SACKS1 SACKS0
R/W
R/W
R/W
0
0
0
Bit 7~4
SAINS3~SAINS0:A/D 转换器输入信号选择位
0000,0100,1100~1111:外部信号 – 外部模拟通道输入
0001:内部 AVDD
0010:内部 AVDD /2
0011:内部 AVDD /4
0101:内部 PGA 输出,VR
0110:内部 PGA 输出,VR/2
0111:内部 PGA 输出,VR/4
若选择内部模拟信号作为 A/D 转换器待转换的信号,由 SACS3~SACS0 位选择
的外部通道将自动与 A/D 转换器断开。
Bit 3
未定义,读为“0”
Bit 2~0
SACKS2~SACKS0:A/D 转换器时钟源选择位
000:fSYS
001:fSYS/2
010:fSYS/4
011:fSYS/8
100:fSYS/16
101:fSYS/32
110:fSYS/64
111:fSYS/128
这三位用于选择 A/D 转换器的时钟源。
● SADC2 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
ADPGAEN
R/W
0
6
─
─
─
5
─
─
─
4
3
2
1
0
PGAIS SAVRS1 SAVRS0 PGAGS1 PGAGS0
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
Bit 7
ADPGAEN:可编程增益放大器 (PGA) 功能控制位
0:除能
1:使能
ADPGAEN 位控制内部 PGA 功能的使能。当设置此位为高,PGA 的输出 VR 可
以被选择作为 A/D 转换器的输入信号,也可以提供参考电压给 A/D 转换器。若
此输出电压 VR 没有被这些功能使用到,则应合理配置此位以节省功耗。
Bit 6~5
未定义,读为“0”
Bit 4
PGAIS:PGA 输入 (VRI) 选择位
0:外部 VREFI 引脚
1:ADVBGIN (ADVBGIN 来自外部源 , 电压值固定为 1.2V)
Bit 3~2
SAVRS1~SAVRS0:A/D 转换器参考电压选择位
00:AVDD
01:来自外部 VREF 引脚
1x:来自内部 PGA 输出,VR
若选择 A/D 转换器参考电压来自内部电压 VR,其它两个参考电压信号将会自动
断开。
125
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 1~0
PGAGS1~ PGAGS0:PGA 增益选择位
00:增益 =1
01:增益 =1.667(若 VRI=1.2V,则 PGA 输出 VR=2V)
10:增益 =2.5(若 VRI=1.2V, 则 PGA 输出 VR=3V)
11:增益 =3.333(若 VRI=1.2V, 则 PGA 输出 VR=4V)
A/D 转换器操作
SADC0 寄存器中的 START 位,用于打开 A/D 转换器。当单片机设置此位从逻
辑低到逻辑高,然后再到逻辑低,就会开始一个模数转换周期。
SADC0 寄存器中的 ADBZ 位用于表明模数转换过程是否正在进行。A/D 转换
成功启动后,ADBZ 位会被单片机自动置为“1”。在转换周期结束后,ADBZ
位会自动清“0”。此外,也会置位中断控制寄存器内相应的 A/D 中断请求标
志位,如果中断使能,就会产生对应的内部中断信号。A/D 内部中断信号将引
导程序跳转到相应的 A/D 内部中断地址。如果 A/D 内部中断被禁止,可以让单
片机轮询 SADC0 寄存器中的 ADBZ 位,检查此位是否被清除,作为另一种侦
测 A/D 转换周期结束的方法。
A/D 转换器的时钟源为系统时钟 fSYS 或其分频,而分频系数由 SADC1 寄存器中
的 SACKS2~SACKS0 位 决 定。 虽 然 A/D 时 钟 源 是 由 系 统 时 钟 fSYS 和
SACKS2~SACKS0 位决定,但可选择的最大 A/D 时钟源则有一些限制。由于允
许的 A/D 时钟周期 tADCK 的范围为 0.5µs~10µs,所以选择系统时钟速度时就必
须小心。如果系统时钟速度为 8MHz 时,SACKS2~SACKS0 位不能设为“000”、
“001”或“111”。必须保证设置的 A/D 转换时钟周期不小于时钟周期的最小
值或大于时钟周期的最大值,否则将会产生不准确的 A/D 转换值。
fSYS
1MHz
2MHz
4MHz
8MHz
12MHz
16MHz
A/D 时钟周期 (tADCK)
SACKS SACKS SACKS SACKS SACKS SACKS SACKS SACKS
[2:0]=000 [2:0]=001 [2:0]=010 [2:0]=011 [2:0]=100 [2:0]=101 [2:0]=110 [2:0]=111
(fSYS)
(fSYS/2)
(fSYS/4)
(fSYS/8)
(fSYS/16) (fSYS/62) (fSYS/64) (fSYS/128)
1μs
2μs
4μs
8μs
16μs*
32μs*
64μs*
128μs*
500ns
1μs
2μs
4μs
8μs
16μs*
32μs*
64μs*
250ns*
500ns
1μs
2μs
4μs
8μs
16μs*
32μs*
125ns*
250ns*
500ns
1μs
2μs
4μs
8μs
16μs*
83ns*
167ns*
333ns*
667ns
1.33μs
2.67μs
5.33μs
10.67μs*
62.5ns*
125ns*
250ns*
500ns
1μs
2μs
4μs
8μs
SADC0 寄存器中的 ADCEN 位用于控制 A/D 转换电路电源的开启和关闭。该
位必须置高以开启 A/D 转换器电源。当设置 ADCEN 位为高开启 A/D 转换器内
部电路时,在 A/D 转换成功开启前需一段延时。即使通过相关引脚共用控制位
选择无引脚作为 A/D 输入,如果 ADCEN 设为“1”,那么仍然会产生功耗。
因此在功耗敏感的应用中,当未使用 A/D 转换器功能时,建议设置 ADCEN 为
低以减少功耗。
Rev. 1.10
126
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
A/D 转换器参考电压
A/D 转换器参考电压可通过 SADC2 寄存器中 SAVRS1~SAVRS0 位选择来自电
源电压 AVDD、外部参考源引脚 VREF 或内部可编程增益放大器(PGA)的输出
电压 VR。若选择外部 VREF 引脚提供参考电压,需要另外先设置相关的引脚共
用功能选择寄存器以选择引脚功能为 VREF。PGA 的输入可通过 PGAIS 位选择
来自外部 VREFI 引脚或来自内部 Bandgap 参考电压 VBGREF,且 PGA 增益也可
由 PGAGS1~PGAGS0 位可选为 1、1.667、2.5、3.333,因此 A/D 转换器参考电
压的选取也更为灵活,可以满足用户的不同需要。注意若选择 A/D 转换器参考
电压来自 VREF 引脚输入,因为此引脚功能与其它功能共用 I/O 口,因此应先
合理配置相关的引脚功能共用功能选择寄存器,选择 VREF 引脚功能。若选择
PGA 输出 VR 作为 A/D 参考电压输入或 A/D 转换内部信号输入,要确保已经设
置 ADPGAEN 位为“1”使能 PGA 输出功能。若未使用到 PGA 功能,可以将
ADPGAEN 位清零,以节省功耗。PGA 输入信号可以通过 SADC2 寄存器中的
PGAIS 位选择来自外部 VREFI 引脚输入或来自 ADVBGIN。注意,A/D 转换器
输入的模拟信号值一定不能超过所选的参考电压值。
SAVRS[1:0] 参考电压源
说明
00
AVDD
来自电源电压,AVDD
01
VREF 引脚 来自外部 VREF 引脚输入
1x
VR
来自内部 PGA 输出,VR
A/D 转换器参考电压选择
VBGRC 寄存器
Bit
Name
R/W
POR
7
—
—
—
6
—
—
—
5
—
—
—
4
—
—
—
3
—
—
—
2
—
—
—
1
—
—
—
0
VBGREN
R/W
0
Bit 7~1
未定义,读为“0”
Bit 0
VBGREN:Bandgap 使能控制位
0:除能
1:使能
当设置 VBGREN 位为零,除能 bandgap 参考电压电路,则输出为高阻抗。
A/D 转换器输入信号
所有的 A/D 模拟输入引脚都与 I/O 口及其它功能共用。使用引脚共用功能选择
寄存器对应位,可以将它们设置为 A/D 转换器模拟输入脚或其它功能引脚。具
体选择设置可参考“引脚共用功能选择寄存器”章节。如果对应的引脚作为 A/D
转换器模拟输入,那么它原来的引脚功能将除能。通过这种方式,引脚的功能
可由程序来控制,灵活地切换引脚功能。如果将引脚设为 A/D 输入,则通过寄
存器设置的所有上拉电阻会自动断开。请注意,端口控制寄存器不需要为使能
A/D 输入而先设定为输入模式,当 A/D 输入功能选择位使能 A/D 输入时,端口
控制寄存器的状态将被重置。
Rev. 1.10
127
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SADC0 寄存器中的 SACS3~SACS0 位用于选择哪个外部模拟输入通道被连接到
内部 A/D 转换器。SADC1 寄存器中的 SAINS3~SAINS0 位用于选择外部模拟输
入通道或内部模拟信号被连接到内部 A/D 转换器。若 SAINS3~SAINS0 位为
“0000,0100,1100~1111”,则选择转换外部模拟输入信号,具体通道编号由
SACS3~SACS0 位 决 定。 若 SAINS2~SAINS0 位 为“0000,0100,1100~1111”
以外的值,则选择内部信号(PGA 输出或电源电压)。若选择了内部信号作为
输入,则外部输入通道将会自动断开,以避免发生内部外部信号冲撞的情况。
SAINS [3:0]
0000,0100,
1100,1101,
1110,1111
0001
0010
0011
0101
0110
0111
SACS [3:0]
输入信号
0000~1111
AN0~AN15
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
AVDD
AVDD/2
AVDD/4
VR
VR/2
VR/4
说明
外部通道模拟输入
A/D 转换器电源电压
A/D 转换器电源电压 /2
A/D 转换器电源电压 /4
PGA 输出电压
PGA 输出电压 /2
PGA 输出电压 /4
“x”:任意值
A/D 转换器输入信号选择
A/D 转换率及时序图
一个完整的 A/D 转换包含两部分,数据采样和数据转换。数据采样时间定义为
tADS,需要 4 个 A/D 时钟周期,而数据转换需要 12 个 A/D 时钟周期。所以一个
完整的 A/D 转换时间,tADC,一共需要 16 个 A/D 时钟周期。
最大 A/D 转换率 =A/D 时钟周期 ÷16
下列时序图表示模数转换过程中不同阶段的图形与时序。由应用程序控制开始
A/D 转换过程后,单片机的内部硬件就会开始进行转换,在这个过程中,程序
可以继续其它功能。A/D 转换时间为 16tADCK,tADCK 为 A/D 时钟周期。
tON2ST
ADCEN
off
on
off
A/D sampling time
tADS
A/D sampling time
tADS
Start of A/D conversion
Start of A/D conversion
End of A/D
conversion
End of A/D
conversion
on
START
ADBZ
SACS[3:0]
0011B
(SAINS[3:0]=0000B)
A/D channel switch
0010B
0000B
tADC
A/D conversion time
tADC
A/D conversion time
Start of A/D conversion
0001B
tADC
A/D conversion time
A/D 转换时序图
Rev. 1.10
128
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
A/D 转换步骤
下面概述实现 A/D 转换过程的各个步骤。
● 步骤 1
通过 SADC1 寄存器中的 SACKS2~SACKS0 位,选择所需的 A/D 转换时钟。
● 步骤 2
将 SADC0 寄存器中的 ADCEN 位置高使能 A/D 转换器。
● 步骤 3
通过 SADC2 寄存器中的 SAINS3~SAINS0 位,选择连接至内部 A/D 转换器的
信号。
若选择外部通道输入,执行步骤 4。
若选择内部模拟信号,执行步骤 5。
● 步骤 4
若已通过 SAINS3~SAINS0 位选择 A/D 输入信号来自外部通道输入,接着应
设置引脚共用功能选择寄存器 PxS0 和 PxS1 中的相关位将该引脚规划为 A/D
输入引脚。通过设置 SACS3~SACS0 位选择哪个外部通道接至 A/D 转换器。
接着执行步骤 6。
● 步骤 5
在选择内部模拟信号前,需先将相关的控制位清零以除能外部通道输入,之
后再设置 SAINS3~SAINS0 位选择所需的内部模拟信号。接着执行步骤 6。
● 步骤 6
通过 SAVRS1~SAVRS0 位选择参考电压。若选择内部信号 VR 作为 A/D 转换
器参考电压,应设置 PGAIS 及 PGAGS[1:0] 位合理配置 PGA 输出,且置位
ADPGAEN 位以使能 PGA 功能。
● 步骤 7
设置 ADRFS 位选择 A/D 转换器输出数据格式。
● 步骤 8
如果要使用中断,则中断控制寄存器需要正确地设置,以确保 A/D 中断功能
是激活的。总中断控制位 EMI 需要置位为“1”,以及 A/D 转换器中断位
ADE 也需要置位为“1”。
● 步骤 9
现在可以通过设置 START 位从“0”到“1”再回到“0”,开始模数转换的
过程。
● 步骤 10
可以轮询 SADC0 寄存器中的 ADBZ 位,检查模数转换过程是否完成。当此
位为逻辑高时,表示转换正在进行中。当此位为逻辑低时,表示转换过程已
经完成。转换完成后,可读取 A/D 数据寄存器 SADOL 和 SADOH 获得转换
后的值。
注:若使用轮询 SADC0 寄存器中 ADBZ 位的状态的方法来检查转换过程是否结束时,则中
断使能的步骤可以省略。
Rev. 1.10
129
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
编程注意事项
在编程时,如果 A/D 转换器未使用,通过设置 SADC0 寄存器中的 ADCEN 为低,
关闭 A/D 内部电路以减少电源功耗。此时,不考虑输入脚的模拟电压,内部 A/D
转换器电路不产生功耗。如果 A/D 转换器输入脚用作普通 I/O 脚,必须特别注
意,输入电压为无效逻辑电平也可能增加功耗。
A/D 转换功能
单片机含有一组 12 位的 A/D 转换器,它们转换的最大值可达 FFFH。由于模拟
输入最大值等于实际输入的 A/D 转换器参考电压 VREF 的电压值,因此每一位可
表示 VREF/4096 的模拟输入值。
1 LSB=VREF ÷ 4096
通过下面的等式可估算 A/D 转换器输入电压值:
A/D 输入电压 = A/D 数字输出值 × (VREF ÷ 4096)
下图显示 A/D 转换器模拟输入值和数字输出值之间理想的转换功能。除了数字
化数值 0,其后的数字化数值会在精确点之前的 0.5 LSB 处改变,而数字化数
值的最大值将在 VDD 之前的 1.5 LSB。
注意此处的 VREF 是指由 SAVRS1~SAVRS0 选择的实际输入 A/D 转换器参考电
压。
1.5 LSB
FFFH
FFEH
FFDH
A/D Conversion
Result
03H
0.5 LSB
02H
01H
0
1
2
3
4093 4094 4095 4096
VREF
4096
Analog Input Voltage
理想的 A/D 转换功能
Rev. 1.10
130
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
A/D 转换应用范例
下面两个范例程序用来说明怎样使用 A/D 转换。第一个范例是轮询 SADC0 寄
存器中的 ADBZ 位来判断 A/D 转换是否完成;第二个范例则使用中断的方式判
断。
范例 1:使用查询 ADBZ 的方式来检测转换结束
clr ADE
mov a,03H
mov SADC1,a
set ADCEN
mov a,03H
mov PCS0,a
mov a,20H
mov SADC0,a
:
start_conversion:
clr START
set START
clr START
:
polling_EOC:
sz ADBZ
jmp polling_EOC
:
mov a,SADOL
mov ADRL_buffer,a
mov a,SADOH
mov ADRH_buffer,a
:
jmp start_conversion
Rev. 1.10
; disable ADC interrupt
; select fSYS/8 as A/D clock
; setup PCS0 to configure pin AN0
; enable and connect AN0 channel to A/D converter
; high pulse on start bit to initiate conversion
; reset A/D
; start A/D
; poll the SADC0 register ADBZ bit to detect end
; of A/D conversion
; continue polling
;
;
;
;
read
save
read
save
low byte conversion result value
result to user defined register
high byte conversion result value
result to user defined register
; start next A/D conversion
131
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
范例 2:使用中断的方式来检测转换结束
clr ADE
mov a,03H
mov SADC1,a
set ADCEN
mov a,03h
mov PSC0,a
mov a,20h
mov SADC0,a
:
Start_conversion:
clr START
set START
clr START
clr ADF
set EADI
set EMI
:
:
ADC_ISR:
mov acc_stack,a
mov a,STATUS
mov status_stack,a
:
mov a,SADOL
mov adrl_buffer,a
mov a,SADOH
mov adrh_buffer,a
:
EXIT_INT_ISR:
mov a,status_stack
mov STATUS,a
mov a,acc_stack
reti
Rev. 1.10
; disable ADC interrupt
; select fSYS/8 as A/D clock
; setup PSC0 to configure pin AN0
; enable and connect AN0 channel to A/D converter
;
;
;
;
;
;
high pulse on START bit to initiate conversion
reset A/D
start A/D
clear ADC interrupt request flag
enable ADC interrupt
enable global interrupt
; ADC interrupt service routine
; save ACC to user defined memory
; save STATUS to user defined memory
;
;
;
;
read
save
read
save
low byte conversion result value
result to user defined register
high byte conversion result value
result to user defined register
; restore STATUS from user defined memory
; restore ACC from user defined memory
132
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
比较器
该单片机包含一个模拟比较器。具有暂停、极性选择、迟滞等功能,可通过寄
存器进行灵活配置。比较器的引脚与普通 I/O 引脚共用,当比较器功能未使用
时,此引脚可做普通引脚使用而不浪费 I/O 资源。
CRSP
C+
S0
C-
CNVT[1:0]
Pin-shared
selection
CMPO
S2
S1
COFM,
COF[4:0]
Comparator
Interrupt
One Shot
+
−
CX Pin
CPOL
CMPEN
Pin-shared selection
比较器
比较器操作
此单片机包含一个比较器功能,用于比较两个模拟电压,基于它们的差值上提
供一个输出。
当比较器使能时,且相关的共用引脚功能选择为比较器输入功能时,连接到该
引脚的上拉电阻将自动失效。当比较器输入接近其切换电压时,由于输入信号
上升或下降速度较慢,比较器输出端可能会产生一些伪输出信号。通过选择迟
滞功能提供少量正反馈给比较器可使此种情况的发生率较大程度地降低。理想
情况下正负输入信号在同一个电压点时比较器输出发生转换,但是不可避免的
输入失调电压会导致一些不确定因素。若迟滞功能使能,也可增加切换偏差值。
迟滞宽度可依不同的比较器响应时间的不同而作出调整。比较器响应时间的具
体值可参考比较器电气特性表格内容。
比较器寄存器
整个内部比较器的工作是通过两个控制寄存器 CMPC 和 CMPVOS 来完成的。
其中的一位用来记录比较器的输出值,此输出值也可通过专门的引脚输出。另
外这些寄存器也提供了输出极性选择,响应时间选择及使能 / 除能控制。
寄存器
名称
CMPC
CMPVOS
位
7
─
─
6
CMPEN
COFM
5
CPOL
CRSP
4
3
2
CMPO CNVT1 CNVT0
COF4
COF3
COF2
1
─
COF1
0
─
COF0
比较器寄存器列表
CMPC 寄存器
Bit
Name
R/W
POR
Bit 7
Rev. 1.10
7
─
─
─
6
CMPEN
R/W
0
5
CPOL
R/W
0
4
3
2
CMPO CNVT1 CNVT0
R
R/W
R/W
0
0
0
1
─
─
─
0
─
─
─
未定义,读为“0”
133
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 6
CMPEN:比较器使能控制位
0:除能
1:使能
此位为比较器开 / 关控制位。为“0”时,比较器关闭,即使其引脚上加有模拟
电压也不会产生功耗。对功耗要求严格的应用中,当比较器未使用或单片机进
入休眠或空闲模式之前,此位应清零。注意若设置此位为零除能比较器功能,
则比较器输出为低。
Bit 5
CPOL:比较器输出极性控制位
0:输出同相
1:输出反相
此位决定比较器输出极性。为“0”时,比较器输出位 CMPO 反映未反相的比
较器输出情况;为“1”时,CMPO 位反映反相后的比较器输出情况。
Bit 4
CMPO:比较器输出位
CPOL=0
0:C+ < C1:C+ > CCPOL=1
0:C+ > C1:C+ < C此位为比较器输出位。此位的值由比较器正负输入端电压和 CPOL 位的状态决
定。
Bit 3~2
CNVT1~CNVT0:比较器响应时间选择
此位段用于选择比较器响应时间。响应时间同样受加在比较器输入端的过驱动
电压值影响。具体内容可参考比较器电气特性表格。
Bit 1~0
未定义,读为“0”
CMPVOS 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
COFM
R/W
0
5
CRSP
R/W
0
4
COF4
R/W
1
3
COF3
R/W
0
2
COF2
R/W
0
1
COF1
R/W
0
0
COF0
R/W
0
Bit 7
未定义,读为“0”
Bit 6
COFM:比较器工作模式选择位
0:正常工作模式
1:输入失调校准模式
此位可用来选择比较器输入校准功能。若设置此位为零,比较器将进行正常的
比较操作。若设置此位为高,将选择比较器输入校准功能。
Bit 5
CRSP:比较器输入校准功能参考输入引脚选择位
0:来自 C- 引脚输入
1:来自 C+ 引脚输入
此位用来选择比较器输入校准时参考信号输入引脚。参考输入可通过此位选择
来自 C+ 或 C- 输入。此位的选择只有在比较器工作在输入校准模式时才有效。
Bit 4~0
COF4~COF0:比较器输入失调电压校准控制位
这 5 位用来执行比较器的输入失调校准操作,并重新储存比较器的输入失调校
准值。更多详细资料请参考“输入失调校准”章节。
134
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
输入失调校准
设置 COFM 位为“1”选择比较器输入失调校准模式,之后设置 CRSP 位选择
校准时参考信号输入端,比较器即可工作在失调校准模式。以下为比较器输入
失调校准步骤:
步骤 1、设置 COFM=1 并设置 CRSP 位,使比较器工作在输入失调校准模式。
步骤 2、设置 COF[4:0] = 00000,读 CMPO 位的值
步骤 3、将 COF[4:0] 的值加 1,再读 CMPO 位的值。
如果 CMPO 位的状态未改变,重复步骤 3 直到 CMPO 位改变。
如果 CMPO 位的状态改变,记录 COF[4:0] 的值为 VOS1,然后转到步骤 4。
步骤 4、设置 COF[4:0] = 11111,读 CMPO 位的值。
步骤 5、将 COF[4:0] 的值减 1,再读 CMPO 位的值。
如果 CMPO 位的状态未改变,重复步骤 5 直到 CMPO 位改变。
如果 CMPO 位的状态改变,记录 COF[4:0] 的值为 VOS2,然后转到步骤 6。
步骤 6、将比较器的输入失调校准值 VCOS 重新储存到 COF[4:0] 位,这样失调校
准就完成了。
其中,VOS = (VOS1+VOS2)/2
Rev. 1.10
135
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
串行接口模块 – SIM
此单片机内建一个串行接口模块,包括两种易与外部设备通信的串行接口:四
线 SPI 或两线 I2C 接口。这两种接口具有相当简单的通信协议,单片机可以通
过这些接口与外部基于 SPI 或 I2C 的传感器、闪存等硬件设备通信。因为 SIM
接口引脚是与其它 I/O 引脚共用,因此在使用 SIM 功能前,要先通过相应的引
脚共用功能选择寄存器选定 SIM 引脚功能。因为 SPI 和 I2C 这两种接口共用引
脚和寄存器,所以要先通过 SIMC0 寄存器中的 SIM2~SIM0 位选择哪一种通信
接口。若 SIM 功能使能且引脚用作 SIM 输入脚,可通过对应上拉电阻控制寄存
器选择此脚的上拉电阻。
SPI 接口
SPI 接口常用于与外部设备如传感器、闪存或 EEPROM 内存等通信。四线 SPI
接口最初是由摩托罗拉公司研制,是一个有相当简单的通信协议的串行数据接
口,这个协议可以简化与外部硬件的编程要求。
SPI 通信模式为全双工模式,且能以主 / 从模式的工作方式进行通信,单片机既
可以做为主机,也可以做为从机。虽然 SPI 接口理论上允许一个主机控制多个
从机,但此单片机 SPI 只提供了一个从机选择引脚 SCS。若需要单个主机同时
控制多个从机,可使用输入 / 输出引脚选择从机。
SPI 接口操作
SPI 接口是一个全双工串行数据传输器。SPI 接口的四线为:SDI、SDO、SCK
和 SCS。SDI 和 SDO 是数据的输入和输出线。SCK 是串行时钟线,SCS 是从
机的选择线。SPI 的接口引脚与普通 I/O 口和 I2C 的功能脚共用。通过设定相关
引脚共用选择位和 SIMC0/SIMC2 寄存器的对应位,来使能 SPI 接口。连接到
SPI 接口的单片机以从主 / 从模式进行通信,且主机完成所有的数据传输初始
化,并控制时钟信号。由于单片机只有一个 SCS 引脚,所以只能拥有一个从机
设备。可通过软件控制 SCS 引脚使能与除能,设置 CSEN 位为“1”使能 SCS
功能,设置 CSEN 位为“0”,SCS 引脚将处于浮空状态。
SPI Master
SPI Slave
SCK
SCK
SDO
SDI
SDI
SDO
SCS
SCS
SPI 主 / 从机连接方式
该单片机的 SPI 功能具有以下特点:
● 全双工同步数据传输
● 主从模式
● 最低有效位先传或最高有效位先传的数据传输模式
● 传输完成标志位
● 时钟源上升沿或下降沿有效
SPI 接口状态受很多因素的影响,如单片机处于主机或从机的工作模式以及
CSEN、SIMEN 位的状态。
Rev. 1.10
136
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Data Bus
SIMD
SDI Pin
TX/RX Shift Register
CKEG
CKPOLB
SDO Pin
Clock
Edge/Polarity
Control
WCOL
TRF
SIMICF
Busy Status
SCK Pin
Clock
Source
Select
fSYS
fSUB
PTM CCRP match frequency/2
SCS Pin
CSEN
SPI 方框图
SPI 寄存器
有三个内部寄存器用于控制 SPI 接口的所有操作,其中有一个数据寄存器
SIMD、两个控制寄存器 SIMC0 和 SIMC2。
位
7
6
5
4
3
2
1
0
SIMC0 SIM2 SIM1
SIM0
—
SIMDEB1 SIMDEB0 SIMEN SIMICF
SIMC2 D7
D6 CKPOLB CKEG
MLS
CSEN
WCOL
TRF
SIMD
D7
D6
D5
D4
D3
D2
D1
D0
寄存器
名称
SPI 寄存器列表
SPI 数据寄存器 – SIMD
SIMD 用于存储发送和接收的数据。这个寄存器由 SPI 和 I2C 功能所共用。在单
片机将数据写入到 SPI 总线之前,要传输的数据应先存在 SIMD 中。SPI 总线
接收到数据之后,单片机就可以从 SIMD 数据寄存器中读取。所有通过 SPI 传
输或接收的数据都必须通过 SIMD 实现。
● SIMD 寄存器
Bit
Name
R/W
POR
7
D7
R/W
x
6
D6
R/W
x
5
D5
R/W
x
4
D4
R/W
x
3
D3
R/W
x
2
D2
R/W
x
1
D1
R/W
x
0
D0
R/W
x
“x”:未知
Bit 7~0
Rev. 1.10
D7~D0:SIM 数据寄存器位 bit 7 ~ bit 0
137
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SPI 控制寄存器 – SIMC0/SIMC2
单片机中也有两个控制 SPI 接口功能的寄存器,SIMC0 和 SIMC2。应注意的是
SIMC2 与 I2C 接口功能中的寄存器 SIMA 是同一个寄存器。SPI 功能不会用到
寄存器 SIMC1,SIMC1 寄存器仅在工作于 I2C 接口时才被使用。寄存器 SIMC0
用于控制使能 / 除能功能和设置数据传输的时钟频率。寄存器 SIMC2 用于其它
的控制功能如 LSB/MSB 选择,写冲突标志位等。
● SIMC0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
SIM2
R/W
1
6
SIM1
R/W
1
5
SIM0
R/W
1
4
—
—
—
3
2
1
0
SIMDEB1 SIMDEB0 SIMEN SIMICF
R/W
R/W
R/W
R/W
0
0
0
0
Bit 7~5
SIM2~SIM0:SIM 工作模式控制位
000:SPI 主机模式;SPI 时钟为 fSYS/4
001:SPI 主机模式;SPI 时钟为 fSYS/16
010:SPI 主机模式;SPI 时钟为 fSYS/64
011:SPI 主机模式;SPI 时钟为 fSUB
100:SPI 主机模式;SPI 时钟为 PTM CCRP 匹配频率 /2
101:SPI 从机模式
110:I2C 从机模式
111:未使用模式
这几位用于设置 SIM 功能的工作模式,除了选择 I2C 或 SPI 功能,还可选择 SPI
的主从模式和 SPI 的主机时钟频率。SPI 时钟源可来自于系统时钟和 fSUB 也可以
选择来自 PTM。若选择的是作为 SPI 从机,则其时钟源从外部主机而得。
Bit 4
未定义,读为“0”
Bit 3~2
SIMDEB1~SIMDEB0:I2C 去抖时间选择位
这些位只有在 SIM 设置成 I2C 接口模式时才有效。请参考 I2C 寄存器部分。
Bit 1
SIMEN:SIM 控制位
0:除能
1:使能
此 位 为 SIM 接 口 的 开 / 关 控 制 位。 此 位 为“0” 时,SIM 接 口 除 能,SDI、
SDO、SCK 和 SCS 或 SDA 和 SCL 脚将失去 SPI 或 I2C 功能,SIM 工作电流减
小到最小值。此位为“1”时,SIM 接口使能。若 SIM 经由 SIM2~SIM0 位设置
为工作在 SPI 接口,当 SIMEN 位由低到高转变时,SPI 控制寄存器中的设置不
会发生变化,其首先应在应用程序中初始化。若 SIM 经由 SIM2~SIM0 位设置
为工作在 I2C 接口,当 SIMEN 位由低到高转变时,I2C 控制寄存器中的设置,
如 HTX 和 TXAK,将不会发生变化,其首先应在应用程序中初始化,此时相关
I2C 标志,如 HCF、HAAS、HBB、SRW 和 RXAK,将被设置为其默认状态。
Bit 0
SIMICF:SIM SPI 未完成标志位
0:未发生
1:发生
此位仅当 SIM 配置在 SPI 从机模式时有效。如果 SPI 工作在从机模式且 SIMEN
和 CSEN 位都为“1”,但在 SPI 数据传输完全结束前 SCS 线被外部主机拉高,
SIMICF 和 TRF 位都会被置高。在这种情况下,如果相应的中断功能使能将产
生一个中断。然而,如果 SIMICF 位是由软件应用程序设为 1,那么 TRF 位将
不会置高。
138
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● SIMC2 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
D7
R/W
0
6
D6
R/W
0
5
CKPOLB
R/W
0
4
CKEG
R/W
0
3
MLS
R/W
0
2
CSEN
R/W
0
1
WCOL
R/W
0
0
TRF
R/W
0
Bit 7~6
未定义位
用户可通过软件程序对这两位进行读写。
Bit 5
CKPOLB:SPI 时钟线的基础状态位
0:当时钟无效时,SCK 引脚为高电平
1:当时钟无效时,SCK 引脚为低电平
此位决定了时钟线的基础状态,若此位为高,当时钟无效时 SCK 为低电平,若
此位为低,当时钟无效时 SCK 为高电平。
Bit 4
CKEG:SPI 的 SCK 有效时钟边沿类型位
CKPOLB=0
0:SCK 为高电平且在 SCK 上升沿抓取数据
1:SCK 为高电平且在 SCK 下降沿抓取数据
CKPOLB=1
0:SCK 为低电平且在 SCK 下降沿抓取数据
1:SCK 为低电平且在 SCK 上升沿抓取数据
CKEG 和 CKPOLB 位用于设置 SPI 总线上时钟信号输入和输出方式。这两位必
须在执行数据传输前先被设置好,否则将产生错误的时钟边沿信号。CKPOLB
位决定时钟线的基本状态,若时钟无效且此位为高,则 SCK 为低电平,若时钟
无效且此位为低,则 SCK 为高电平。CKEG 位决定有效时钟边沿类型,取决于
CKPOLB 的状态。
Bit 3
MLS:SPI 数据移位顺序选择位
0:LSB 优先
1:MSB 优先
数据移位顺序选择位,用于选择数据传输时高位优先传输还是低位优先传输。
此位设置为高时高位优先传输,为低时低位优先传输。
Bit 2
CSEN:SPI SCS 引脚控制位
0:除能
1:使能
CSEN 位用于 SCS 引脚的使能 / 除能控制。此位为低时,SCS 除能,可用于普
通 I/O 引脚或其它共用功能。此位为高时,SCS 作为从机选择引脚。
Bit 1
WCOL:SPI 写冲突标志位
0:无冲突
1:冲突
WCOL 标志位用于监测数据冲突的发生。此位为高时,表示在传输过程中有数
据被写入 SIMD 寄存器。若数据正在被传输时,此写操作无效。此位可通过应
用程序清零。
Bit 0
TRF:SPI 发送 / 接收结束标志位
0:数据正在发送中
1:数据发送结束
TRF 位为发送 / 接收结束标志位,当 SPI 数据传输结束时,此位自动置为高,
但须通过应用程序设置为“0”。此位也可用于产生中断。
139
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SPI 通信
将 SIMEN 设置为高,使能 SPI 功能之后,单片机处于主机模式,当数据写入到
寄存器 SIMD 的同时传输 / 接收开始进行。数据传输完成时,TRF 位将自动被
置位但清除只能通过应用程序完成。单片机处于从机模式时,收到主机发来的
信号之后,会传输 SIMD 中的数据,而且在 SDI 引脚上的数据也会被移位到
SIMD 寄存器中。主机应在输出时钟信号之前先输出一个 SCS 信号以使能从机,
从 机 的 数 据 传 输 功 能 也 应 在 与 SCS 信 号 相 关 的 适 当 时 候 准 备 就 绪, 这 由
CKPOLB 和 CKEG 位决定。所附时序图表明了在 CKPOLB 和 CKEG 位各种设
置情况下从机数据与 SCS 信号的关系。
即使单片机空闲模式时,若 SPI 接口使用的时钟源开启,SPI 功能仍将继续执行。
SIMEN=1, CSEN=0 (External Pull-high)
SCS
SIMEN, CSEN=1
SCK (CKPOLB=1, CKEG=0)
SCK (CKPOLB=0, CKEG=0)
SCK (CKPOLB=1, CKEG=1)
SCK (CKPOLB=0, CKEG=1)
SDO (CKEG=0)
D7/D0
D6/D1
D5/D2
D4/D3
D3/D4 D2/D5
D1/D6
D0/D7
SDO (CKEG=1)
D7/D0
D6/D1
D5/D2
D4/D3
D3/D4 D2/D5
D1/D6
D0/D7
SDI Data Capture
Write to SIMD
SPI 主机模式时序
SCS
SCK (CKPOLB=1)
SCK (CKPOLB=0)
SDO
D7/D0
D6/D1
D5/D2
D4/D3
D3/D4 D2/D5
D1/D6
D0/D7
SDI Data Capture
Write to SIMD
(SDO does not change until first SCK edge)
SPI 从机模式时序 – CKEG=0
Rev. 1.10
140
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SCS
SCK (CKPOLB=1)
SCK (CKPOLB=0)
SDO
D7/D0
D6/D1
D5/D2
D4/D3
D3/D4 D2/D5
D1/D6
D0/D7
SDI Data Capture
Write to SIMD
(SDO changes as soon as writing occurs; SDO is floating if SCS=1)
Note: For SPI slave mode, if SIMEN=1 and CSEN=0, SPI is always enabled
and ignores the SCS level.
SPI 从机模式时序 – CKEG=1
SPI Transfer
Master
Master or Slave
?
A
Write Data
into SIMD
Clear WCOL
Slave
Y
SIM[2:0]=000, 001,
010, 011 or 100
WCOL=1?
SIM[2:0]=101
N
N
Configure CKPOLB,
CKEG, CSEN and MLS
Transmission
completed?
(TRF=1?)
Y
SIMEN=1
Read Data
from SIMD
A
Clear TRF
Transfer
finished?
N
Y
END
SPI 传输控制流程图
Rev. 1.10
141
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
I2C 接口
I2C 接口可以用于和传感器、EEPROM 存储器等外部硬件进行通信。最初是由
飞利浦公司研制,是适用于同步串行数据传输的双线式低速串行接口。I2C 接口
具有两线通信,非常简单的通信协议和在同一总线上和多个设备进行通信的能
力的优点,使之在很多的应用场合中大受欢迎。
VDD
SDA
SCL
Device
Slave
Device
Master
Device
Slave
I2C 主从总线连接图
I2C 接口操作
I2C 串行接口是一个双线的接口,有一条串行数据线 SDA 和一条串行时钟线
SCL。由于可能有多个设备在同一条总线上相互连接,所以这些设备的输出都
是开漏型输出。因此应在这些输出口上都应加上拉电阻。应注意的是,I2C 总线
上的每个设备都没有选择线,但分别与唯一的地址一一对应,用于 I2C 通信。
如果有两个设备通过双向的 I2C 总线进行通信,那么就存在一个主机和一个从
机。主机和从机都可以用于传输和接收数据,但只有主机才可以控制总线动作。
那些处于从机模式的设备,要在 I2C 总线上传输数据只有两种方式,一是从机
发送模式,二是从机接收模式。
� � �� �� � �
� � � �� � � �� � ��
� ��
� � �
�
� � � � �
� � � ��� �
� ��
�
� � �� ��
� � � ��
� � � � ��
�� � �� � �� �� � � �� �� �
�� �� � �
� � � � � � �
� �� � � ���
� �� � �
� �� � �
�
�
�
� � � �� � �
� � � �� �� �
� �� � � ��� � �� � � �� � �
� � �� ��� �� � � �
� � �� � � ���� � �
� ��
� �� � � � � � � �� � � �� �� �
�� �� � �
� � � �� � � �� � ��
� � � � �� ��
��� ��� �� ��� �
� �� � ��
�
� ��� � � �� �� �
� � � � � ��� �� ��
�
� � �� ��
� �
� � � � ��� � � � �
�
� � � �� � ��� � ��
���� � �� �� � �� ��
� � �� � ��� �� ���� ��� ��
� � �� ��
� � � �� ��
2
I C 方框图
Rev. 1.10
142
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
S T A R T s ig n a l
fro m M a s te r
S e n d s la v e a d d r e s s
a n d R /W b it fr o m M a s te r
A c k n o w le d g e
fr o m s la v e
S e n d d a ta b y te
fro m M a s te r
A c k n o w le d g e
fr o m s la v e
S T O P s ig n a l
fro m M a s te r
SIMDEB1 和 SIMDEB0 位决定 I2C 接口的去抖时间。这个功能可以使用内部时
钟在外部时钟上增加一个去抖间隔,减小时钟线上毛刺发生的可能性,以避免
单片机发生误动作。如果选择了这个功能,去抖时间可以选择 2 个或 4 个系统
时钟。为了达到需要的 I2C 数据传输速度,系统时钟 fSYS 和 I2C 去抖时间之间存
在一定的关系。I2C 标准模式或者快速模式下,用户需注意所选的系统时钟频率
与标准匹配去抖时间的设置,其具体关系如下表所示。
I2C 去抖时间选择
I2C 标准模式(100kHz) I2C 快速模式(400kHz)
无去抖时间
fSYS > 2 MHz
fSYS > 5 MHz
2 个系统时钟去抖时间
fSYS > 4 MHz
fSYS > 10 MHz
4 个系统时钟去抖时间
fSYS > 8 MHz
fSYS > 20 MHz
I2C 最小 fSYS 频率
I2C 寄存器
I2C 总 线 有 三 个 控 制 寄 存 器 SIMC0、SIMC1 和 SIMTOC, 一 个 地 址 寄 存 器
SIMA 以及一个数据寄存器 SIMD。
位
寄存器
名称
7
6
5
4
SIMC0
SIM2
SIM1
SIM0
—
SIMC1
HCF
HAAS
HBB
HTX
TXAK
SIMA
A6
A5
A4
A3
SIMD
D7
D6
D5
D4
SIMTOC
SIMTOEN SIMTOF
3
2
1
0
SIMEN
SIMICF
SRW
IAMWU
RXAK
A2
A1
A0
D0
D3
D2
D1
D0
SIMDEB1 SIMDEB0
SIMTOS5 SIMTOS4 SIMTOS3 SIMTOS2 SIMTOS1 SIMTOS0
I2C 寄存器列表
Rev. 1.10
143
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
I2C 数据寄存器 – SIMD
SIMD 用于存储发送和接收的数据。这个寄存器由 SPI 和 I2C 功能所共用。在单
片机将数据写入到 I2C 总线之前,要传输的数据应先存在 SIMD 中。I2C 总线接
收到数据之后,单片机就可以从 SIMD 数据寄存器中读取。所有通过 I2C 传输
或接收的数据都必须通过 SIMD 实现。
● SIMD 寄存器
Bit
Name
R/W
POR
7
D7
R/W
x
6
D6
R/W
x
5
D5
R/W
x
4
D4
R/W
x
3
D3
R/W
x
2
D2
R/W
x
1
D1
R/W
x
0
D0
R/W
x
“x”:未知
Bit 7~0
D7~D0:SIM 数据寄存器位 bit 7 ~ bit 0
I2C 地址寄存器 – SIMA
SIMA 寄存器也在 SPI 接口功能中使用(用于 SPI 功能时其名称为 SIMC2)。
SIMA 寄存器用于存放 7 位从机地址,寄存器 SIMA 中的 bit 7 ~ bit 1 是单片机
的从机地址,bit 0 未定义。
如果接至 I2C 的主机发送出的地址和寄存器 SIMA 中存储的地址相符,那么就
选中了这个从机。应注意的是寄存器 SIMA 和 SPI 接口使用的寄存器 SIMC2 位
于同一个寄存器地址。
● SIMA 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
A6
R/W
0
6
A5
R/W
0
5
A4
R/W
0
4
A3
R/W
0
Bit 7~1
A6~A0:I2C 从机地址位
A6~A0 是从机地址 bit 6 ~ bit 0。
Bit 0
未定义位
此位可通过软件程序进行读写。
144
3
A2
R/W
0
2
A1
R/W
0
1
A0
R/W
0
0
D0
R/W
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
I2C 控制寄存器 – SIMC0,SIMC1,SIMTOC
单片机中有三个控制 I2C 接口功能的寄存器,SIMC0、SIMC1 和 SIMTOC。寄
存器 SIMC0 用于控制使能 / 除能功能和设置数据传输的时钟频率。寄存器
SIMC1 包括多个用于指示 I2C 传输状态的相关标志位。SIMTOC 寄存器用于控
制 I2C 超时功能,此寄存器在 I2C 超时控制一节介绍。
● SIMC0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
SIM2
R/W
1
6
SIM1
R/W
1
5
SIM0
R/W
1
4
—
—
—
3
2
1
0
SIMDEB1 SIMDEB0 SIMEN SIMICF
R/W
R/W
R/W
R/W
0
0
0
0
Bit 7~5
SIM2~SIM0:SIM 工作模式控制位
000:SPI 主机模式;SPI 时钟为 fSYS/4
001:SPI 主机模式;SPI 时钟为 fSYS/16
010:SPI 主机模式;SPI 时钟为 fSYS/64
011:SPI 主机模式;SPI 时钟为 fSUB
100:SPI 主机模式;SPI 时钟为 PTM CCRP 匹配频率 /2
101:SPI 从机模式
110:I2C 从机模式
111:未使用模式
这几位用于设置 SIM 功能的工作模式,用于选择 SPI 的主从模式和 SPI 的主机
时钟频率及 I2C 或 SPI 功能。SPI 时钟源可来自于系统时钟和 fSUB 也可以选择来
自 PTM。若选择的是作为 SPI 从机,则其时钟源从外部主机而得。
Bit 4
未定义,读为“0”
Bit 3~2
SIMDEB1~SIMDEB0:I2C 去抖时间选择位
00:无去抖时间
01:2 个系统时钟去抖时间
1x:4 个系统时钟去抖时间
当设置 SIM2~SIM0 位为“110”将 SIM 设置为 I2C 接口功能时,这两个位用于
选择 I2C 去抖时间。
Bit 1
SIMEN:SIM 控制位
0:除能
1:使能
此 位 为 SIM 接 口 的 开 / 关 控 制 位。 此 位 为“0” 时,SIM 接 口 除 能,SDI、
SDO、SCK 和 SCS 或 SDA 和 SCL 脚将失去 SPI 或 I2C 功能,SIM 工作电流减
小到最小值。此位为“1”时,SIM 接口使能。若 SIM 经由 SIM2~SIM0 位设置
为工作在 SPI 接口,当 SIMEN 位由低到高转变时,SPI 控制寄存器中的设置不
会发生变化,其首先应在应用程序中初始化。若 SIM 经由 SIM2~SIM0 位设置
为工作在 I2C 接口,当 SIMEN 位由低到高转变时,I2C 控制寄存器中的设置,
如 HTX 和 TXAK,将不会发生变化,其首先应在应用程序中初始化,此时相关
I2C 标志,如 HCF、HAAS、HBB、SRW 和 RXAK,将被设置为其默认状态。
Bit 0
SIMICF:SIM SPI 未完成标志位
此位仅当 SIM 配置在 SPI 从机模式时有效。请参考 SPI 寄存器部分。
145
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
● SIMC1 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
HCF
R
1
6
HAAS
R
0
5
HBB
R
0
4
HTX
R/W
0
3
TXAK
R/W
0
2
SRW
R
0
1
0
IAMWU RXAK
R/W
R
0
1
Bit 7
HCF:I2C 总线数据传输结束标志位
0:数据正在传输中
1:8 位数据传输完成
数据正在传输时该位为低。当 8 位数据传输完成时,此位为高并产生一个中断。
Bit 6
HAAS:I2C 地址匹配标志位
0:地址未匹配
1:地址匹配
此标志位用于决定从机地址是否与主机发送的地址相同。若地址匹配此位为高,
否则此位为低。
Bit 5
HBB:I2C 总线忙标志位
0:I2C 总线闲
1:I2C 总线忙
当检测到 START 信号时 I2C 忙,此位变为高电平。当检测到 STOP 信号时 I2C
总线空闲,该位变为低电平。
Bit 4
HTX:从机处于发送或接收模式标志位
0:从机处于接收模式
1:从机处于发送模式
Bit 3
TXAK:I2C 总线发送应答标志位
0:从机发送应答标志
1:从机没有发送应答标志
从机接收完 8 位数据之后,该位将在第九个从机时钟时被传到总线上。如果从
机想要接收更多的数据,则应在接收数据之前将此位设置为“0”。
Bit 2
SRW:I2C 从机读 / 写位
0:从机应处于接收模式
1:从机应处于发送模式
SRW 位是从机读写位。决定主机是否希望传输数据或接收来自 I2C 总线的数据。
当传输地址和从机的地址相同时,HAAS 位会被设置为高,从机将检测 SRW 位
来决定进入发送模式还是接收模式。如果 SRW 位为高时,主机会请求从总线上
读数据,此时从机处于发送模式。当 SRW 位为“0”时,主机往总线上写数据,
从机处于接收模式以读取数据。
Bit 1
IAMWU:I2C 地址匹配唤醒控制位
0:除能
1:使能
此位设置为“1”则使能 I2C 地址匹配使系统从休眠或空闲模式中唤醒的功能。
若进入休眠或空闲模式前 IAMWU 已经置高以使能 I2C 地址匹配唤醒功能,在
系统唤醒后须软件清除此位以确保单片机正确地运行。
Bit 0
RXAK:I2C 总线接收应答标志位
0:从机接收到应答标志
1:从机未接收到应答标志
RXAK 位是接收应答标志位。如果 RXAK 位为“0”,即表示 8 位数据传输之后,
从机在第九个时钟有接受到一个应答信号。如果从机处于发送状态,从机作为
发送方会检查 RXAK 位来判断主机接收方是否愿意继续接收下一个字节。因此
发送方会一直发送数据,直到 RXAK 为“1”时才停止发送数据。这时,发送
方将释放 SDA 线,主机方可发出停止信号从而释放 I2C 总线。
146
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
I2C 总线通信
I2C 总线上的通信需要四步完成,一个起始信号,一个从机地址发送,一个数据
传输,还有一个停止信号。当起始信号被写入 I2C 总线时,总线上的所有从机
都会接收到这个起始信号并且被通知总线上即将有数据到达。数据的前 7 位是
从机地址,高位在前,低位在后。如果发出的地址和从机地址匹配,SIMC1 寄
存器的 HAAS 位会被置位,同时产生 I2C 中断。进入中断服务程序后,系统要
检测 HAAS 位和 SIMTOF 位,以判断 I2C 总线中断是来自从机地址匹配,还是
来自 8 位数据传递完毕,或是来自 I2C 超时。在数据传递中,要注意的是,在 7
位从机地址被发送后,接下来的一位,即第 8 位,是读 / 写控制位,该位的值
会反映到 SRW 位中。从机通过检测 SRW 位以确定自己是要进入发送模式还是
接收模式。在 I2C 总线开始传送数据前,需要先初始化 I2C 总线,初始化 I2C 总
线步骤如下:
● 步骤 1
设置 SIMC0 寄存器中 SIM2~SIM0 位为“110”和 SIMEN 位为“1”,以使能
I2C 总线。
● 步骤 2
向 I2C 总线地址寄存器 SIMA 写入从机地址。
● 步骤 3
设置 SIME 位以使能 SIM 中断。
Start
Set SIM[2:0]=110
Set SIMEN
Write Slave
Address to SIMA
No
Yes
I2C Bus
Interrupt=?
CLR SIME
Poll SIMF to decide when
to go to I2C Bus ISR
SET SIME
Wait for Interrupt
Goto Main Program
Goto Main Program
I2C 总线初始化流程图
Rev. 1.10
147
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
I2C 总线起始信号
起始信号只能由连接 I2C 总线的主机产生,而不是由从机产生。总线上的所有
从机都可以侦测到起始信号。如果有从机侦测到起始信号,则表明 I2C 总线处
于忙碌状态,并会置位 HBB。起始信号是指在 SCL 为高电平时,SDA 线上发
生从高到低的电平变化。
从机地址
总线上的所有从机都会侦测由主机发出的起始信号。发送起始信号后,紧接着
主机会发送从机地址以选择要进行数据传输的从机。所有在 I2C 总线上的从机
接收到 7 位地址数据后,都会将其与各自内部的地址进行比较。如果从机从主
机上接收到的地址与自身内部的地址相匹配,则会产生一个 I2C 总线中断信号。
地址位接下来的一位为读 / 写状态位(即第 8 位),将被保存到 SIMC1 寄存器
的 SRW 位,从机随后发出一个低电平应答信号(即第 9 位)。当从机地址匹
配时,从机会将状态标志位 HAAS 置位。
I2C 总线中断有三个中断源,当程序运行至中断服务子程序时,通过检测 HAAS
位和 SIMTOF 位,以判断 I2C 总线中断是来自从机地址匹配,还是来自 8 位数
据传递完毕,或是来自 I2C 超时。当是从机地址匹配发生中断时,则从机或是
用于发送模式并将数据写进 SIMD 寄存器,或是用于接收模式并从 SIMD 寄存
器中读取空值以释放 SCL 线。
I2C 总线读 / 写信号
SIMC1 寄存器的 SRW 位用来表示主机是要从 I2C 总线上读取数据还是要将数
据写到 I2C 总线上。从机通过检测该位以确定自己是作为发送方还是接收方。
当 SRW 置“1”,表示主机要从 I2C 总线上读取数据,从机则作为发送方,将
数据写到 I2C 总线;当 SRW 清“0”,表示主机要写数据到 I2C 总线上,从机
则做为接收方,从 I2C 总线上读取数据。
I2C 总线从机地址应答信号
主机发送呼叫地址后,当 I2C 总线上的任何从机内部地址与其匹配时,会发送
一个应答信号。此应答信号会通知主机有从机已经接收到了呼叫地址。如果主
机没有收到应答信号,则主机必须发送停止(STOP)信号以结束通信。当
HAAS 为高时,表示从机接收到的地址与自己内部地址匹配,则从机需检查
SRW 位,以确定自己是作为发送方还是作为接收方。如果 SRW 位为高,从机
须设置成发送方,这样会置位 SIMC1 寄存器的 HTX 位。如果 SRW 位为低,
从机须设置成接收方,这样会清零 SIMC1 寄存器的 HTX 位。
Rev. 1.10
148
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
I2C 总线数据和应答信号
在从机确认接收到从地址后,会进行 8 位宽度的数据传输。这个数据传输顺序
是的高位在前,低位在后。接收方在接收到 8 位数据后必须发出一个应答信号
(“0”)以继续接收下一个数据。如果从机发送方没接收到来自主机接收方的
应答信号,发送方将释放 SDA 线,此时主机方可发出 STOP 信号以释放 I2C 总
线。所传送的数据存储在 SIMD 寄存器中。如果设置成发送方,从机必须先将
欲传输的数据写到 SIMD 寄存器中;如果设置成接收方,从机必须从 SIMD 寄
存器读取数据。
当 接 收 器 想 要 继 续 接 收 下 一 个 数 据 时, 必 须 在 第 9 个 时 钟 发 出 应 答 信 号
(TXAK)。被设为发送方的从机将检测寄存器 SIMC1 中的 RXAK 位以判断是否
传输下一个字节的数据,如果从机不传输下一个字节,那么它将释放 SDA 线并
等待接收主机的停止信号。
SCL
Slave Address
Start
1
SDA
1
0
1
0
1
SRW
ACK
1
0
0
Data
SCL
1
0
0
1
0
ACK
1
0
Stop
0
SDA
S=Start (1 bit)
SA=Slave Address (7 bits)
SR=SRW bit (1 bit)
M=Slave device send acknowledge bit (1 bit)
D=Data (8 bits)
A=ACK (RXAK bit for transmitter, TXAK bit for receiver, 1 bit)
P=Stop (1 bit)
S
SA SR M
D
A
D
A
……
S
SA SR M
D
A
D
A
……
P
注:* 当从机地址匹配时,单片机必须选择设置为发送模式还是接收模式。若设置为发送模
式,需写数据至 SIMD 寄存器;若设置为接收模式,需立即从 SIMD 寄存器中虚读数据
以释放 SCL 线。
I2C 通信时序图
Rev. 1.10
149
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Start
No
No
No
HTX=1?
Yes
HAAS=1?
Yes
SIMTOF=1?
Yes
Yes
SET SIMTOEN
CLR SIMTOF
SRW=1?
No
RETI
Read from SIMD to
release SCL Line
RETI
Yes
SET HTX
CLR HTX
CLR TXAK
Write data to SIMD to
release SCL Line
Dummy read from SIMD
to release SCL Line
RETI
RETI
RXAK=1?
No
CLR HTX
CLR TXAK
Write data to SIMD to
release SCL Line
Dummy read from SIMD
to release SCL Line
RETI
RETI
I2C 总线 ISR 流程图
I2C 超时控制
超时功能可减少 I2C 接收错误的时钟源而引起的锁死问题。如果连接到 I2C 总
线的时钟源经过一段时间还未接收到,则在一定的超时周期后,I2C 电路和寄存
器将复位。超时计数器在 I2C 总线“START”和“地址匹配”条件下开始计数,
且在 SCL 下降沿清零。在下一个 SCL 下降沿到来之前,如果超时时间大于
SIMTOC 寄存器指定的超时周期,则超时发生。I2C“STOP”条件发生时超时
功能终止。
Rev. 1.10
150
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SCL
Start
Slave Address
1
SDA
0
1
1
0
1
SRW
ACK
1
0
0
I2C time-out
counter start
Stop
SCL
1
0
0
1
0
1
0
0
SDA
I2C time-out counter reset
on SCL negative transition
I2C 超时时序图
当 I2C 超 时 计 数 器 溢 出 时, 计 数 器 将 停 止 计 数,SIMTOEN 位 被 清 零, 且
SIMTOF 位被置高以表明超时计数器中断发生。超时计数器中断使用的也是 I2C
中断向量。当 I2C 超时发生时,I2C 内部电路会被复位,寄存器也将发生如下复
位情况。
I2C 超时发生后
保持不变
复位至 POR 状态
寄存器
SIMD,SIMA,SIMC0
SIMC1
超时发生后的 I2C 寄存器
SIMTOF 标志位由应用程序清零。共有 64 个超时周期,可通过 SIMTOC 寄存
器的 SIMTOSn 位进行选择。超时周期可通过公式计算:((1~64) × (32/fSUB))。由
此可得超时周期范围为 1ms~64ms。
● SIMTOC 寄存器
Bit
7
6
5
4
3
2
1
0
Name SIMTOEN SIMTOF SIMTOS5 SIMTOS4 SIMTOS3 SIMTOS2 SIMTOS1 SIMTOS0
Rev. 1.10
R/W
R/W
R/W
POR
0
0
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
2
Bit 7
SIMTOEN:I C 超时控制位
0:除能
1:使能
Bit 6
SIMTOF:I2C 超时标志位
0:超时未发生
1:超时发生
Bit 5~0
SIMTOS5~SIMTOS0:I2C 超时时间选择位
I2C 超时时钟源是 fSUB/32
I2C 超时时间计算方法:([SIMTOS[5:0]+1) × (32/fSUB)
151
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
UART 接口
该单片机具有一个全双工的异步串行通信接口——UART,可以很方便的与其
它具有串行口的芯片通信。UART 具有许多功能特性,发送或接收串行数据时,
将数据组成一个 8 位或 9 位的数据块,连同数据特征位一并传输。具有检测数
据覆盖或帧错误等功能。UART 功能占用一个内部中断向量,当接收到数据或
数据发送结束,触发 UART 中断。
内置的 UART 功能包含以下特性:
● 全双工通用异步接收器 / 发送器
● 8 位或 9 位传输格式
● 奇校验、偶校验或无校验
● 1 位或 2 位停止位
● 8 位预分频的波特率发生器
● 奇偶、帧、噪声和溢出检测
● 支持地址匹配中断(最后一位 =1)
● 独立的发送和接收使能
● 2-byte FIFO 接收缓冲器
● 发送和接收中断
● 中断可由下列条件初始化:
♦ 发送器为空
♦ 发送器空闲
♦ 接收完成
♦ 接收器溢出
♦ 地址匹配
♦ RX 引脚唤醒
Transmitter Shift Register (TSR)
MSB ………………………… LSB
TX Pin
TX Register (TXR_RXR)
RX Pin
Receiver Shift Register (RSR)
MSB ………………………… LSB
Baud Rate
Generator
fH
Data to be transmitted
RX Register (TXR_RXR)
Buffer
Data received
MCU Data Bus
UART 数据传输方框图
UART 外部引脚
内部 UART 有两个外部引脚 TX 和 RX,可与外部串行接口进行通信。TX 和
RX 分别为 UART 发送脚和接收脚,与 I/O 口或其它功能共用引脚。在使用
UART 功能前,应先通过相应的引脚共用功能选择寄存器,选择 TX 和 RX 引
脚功能。当 UARTEN、TXEN 和 RXEN 位置高时,将自动设置这些 I/O 脚或其
它共用功能脚作为 TX 输出和 RX 输入,并且除能 TX 和 RX 引脚上的上拉电阻
功能。当 UARTEN、TXEN 或 RXEN 位清零除能 TX 或 RX 引脚功能后,TX
或 RX 引脚将处于浮空状态。这时 TX 或 RX 引脚是否连接内部上拉电阻是由
相应的 I/O 上拉电阻控制位决定的。
Rev. 1.10
152
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
UART 数据传输方案
前面方框图显示了 UART 的整体结构。需要发送的数据首先写入 TXR_RXR 寄
存器,接着此数据被传输到发送移位寄存器 TSR 中,然后在波特率发生器的控
制下将 TSR 寄存器中数据一位位地移到 TX 引脚上,低位在前。TXR_RXR 寄
存器被映射到单片机的数据存储器中,而发送移位寄存器没有实际地址,所以
发送移位寄存器不可直接操作。
数据在波特率发生器的控制下,低位在前高位在后,从外部引脚 RX 进入接收
移位寄存器 RSR。当数据接收完成,数据从接收移位寄存器移入可被用户程序
操作的 TXR_RXR 寄存器中。TXR_RXR 寄存器被映射到单片机数据存储器中,
而接收移位寄存器没有实际地址,所以接收移位寄存器不可直接操作。
需要注意的是,发送和接收都是共用同一个地址的数据寄存器,即 TXR_RXR
寄存器。
UART 状态和控制寄存器
与 UART 功能相关的有五个寄存器 ——控制 UART 模块整体功能的 USR、
UCR1 和 UCR2 寄存器,控制波特率的 BRG 寄存器,管理发送和接收数据的数
据寄存器 TXR_RXR。
位
寄存器
名称
7
6
5
4
3
2
1
0
USR
PERR
NF
FERR OERR RIDLE RXIF TIDLE TXIF
UCR1
UARTEN BNO PREN
PRT
STOPS TXBRK RX8
TX8
UCR2
TXEN RXEN BRGH ADDEN WAKE
RIE
TIIE
TEIE
TXR_RXR
D7
D6
D5
D4
D3
D2
D1
D0
BRG
BRG7
BRG6 BRG5 BRG4 BRG3 BRG2 BRG1 BRG0
UART 寄存器列表
TXR_RXR 寄存器
TXR_RXR 是一个数据寄存器,用来存储 TX 引脚将要发送或 RX 引脚正在接收
的数据。
Bit
Name
R/W
POR
7
D7
R/W
x
6
D6
R/W
x
5
D5
R/W
x
4
D4
R/W
x
3
D3
R/W
x
2
D2
R/W
x
1
D1
R/W
x
0
D0
R/W
x
“x”:未知
Bit 7~0
Rev. 1.10
UART 发送 / 接收数据位 Bit 7~Bit 0
153
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
USR 寄存器
寄存器 USR 是 UART 的状态寄存器,可以通过程序读取。所有 USR 位是只读
的。详细解释如下:
Bit
Name
R/W
POR
Rev. 1.10
7
PERR
R
0
6
NF
R
0
5
FERR
R
0
4
OERR
R
0
3
RIDLE
R
1
2
RXIF
R
0
1
TIDLE
R
1
0
TXIF
R
1
Bit 7
PERR:奇偶校验出错标志位
0:奇偶校验正确
1:奇偶校验出错
PERR 是奇偶校验出错标志位。若 PERR=0,奇偶校验正确;若 PERR=1,接收
到的数据奇偶校验出错。只有使能了奇偶校验此位才有效。可使用软件清除该
标志位,即先读取 USR 寄存器再读 TXR_RXR 寄存器来清除此位。
Bit 6
NF:噪声干扰标志位
0:没有受到噪声干扰
1:受到噪声干扰
NF 是噪声干扰标志位。若 NF=0,没有受到噪声干扰;若 NF=1,UART 接收数
据时受到噪声干扰。它与 RXIF 在同周期内置位,但不会与溢出标志位同时置
位。可使用软件清除该标志位,即先读取 USR 寄存器再读 TXR_RXR 寄存器将
清除此标志位。
Bit 5
FERR:帧错误标志位
0:无帧错误发生
1:有帧错误发生
FREE 是帧错误标志位。若 FREE=0,没有帧错误发生;若 FREE=1,当前的数
据发生了帧错误。可使用软件清除该标志位,即先读取 USR 寄存器再读 TXR_
RXR 寄存器来清除此位。
Bit 4
OERR:溢出错误标志位
0:无溢出错误发生
1:有溢出错误发生
OERR 是溢出错误标志位,表示接收缓冲器是否溢出。若 OERR=0,没有溢出
错误;若 OERR=1,发生了溢出错误,它将禁止下一组数据的接收。可通过软
件清除该标志位,即先读取 USR 寄存器再读 TXR_RXR 寄存器将清除此标志位。
Bit 3
RIDLE:接收状态标志位
0:正在接收数据
1:接收器空闲
RIDLE 是接收状态标志位。若 RIDLE=0,正在接收数据;若 RIDLE=1,接收器
空 闲。 在 接 收 到 停 止 位 和 下 一 个 数 据 的 起 始 位 之 间,RIDLE 被 置 位, 表 明
UART 空闲,RX 脚处于逻辑高状态。
Bit 2
RXIF:接收寄存器状态标志位
0:TXR_RXR 寄存器为空
1:TXR_RXR 寄存器含有有效数据
RXIF 是 接 收 寄 存 器 状 态 标 志 位。 当 RXIF=0,TXR_RXR 寄 存 器 为 空; 当
RXIF=1,TXR_RXR 寄存器接收到新数据。当数据从移位寄存器加载到 TXR_
RXR 寄存器中,如果 UCR2 寄存器中的 RIE=1,则会触发中断。当接收数据时
检测到一个或多个错误时,相应的标志位 NF、FERR 或 PERR 会在同一周期内
置位。读取 USR 寄存器再读 TXR_RXR 寄存器,如果 TXR_RXR 寄存器中没有
新的数据,那么将清除 RXIF 标志。
154
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 1
TIDLE:数据发送完成标志位
0:数据传输中
1:无数据传输
TIDLE 是数据发送完成标志位。若 TIDLE=0,数据传输中。当 TXIF=1 且数据
发送完毕或者暂停字被发送时,TIDLE 置位。TIDLE=1,TX 引脚空闲且处于逻
辑高状态。读取 USR 寄存器再写 TXR_RXR 寄存器将清除 TIDLE 位。数据字
符或暂停字就绪时,不会产生该标志位。
Bit 0
TXIF:发送数据寄存器 TXR_RXR 状态位
0:数据还没有从缓冲器加载到移位寄存器中
1:数据已从缓冲器加载到移位寄存器中 (TXR_RXR 数据寄存器为空 )
TXIF 是发送数据寄存器为空标志位。若 TXIF=0,数据还没有从缓冲器加载到
移位寄存器中;若 TXIF=1,数据已从缓冲器中加载到移位寄存器中。读取 USR
存器再写 TXR_RXR 寄存器将清除 TXIF。当 TXEN 被置位,由于发送缓冲器未
满,TXIF 也会被置位。
UCR1 寄存器
UCR1 和 UCR2 是 UART 的两个控制寄存器,用来定义各种 UART 功能,例如
UART 的使能与除能、奇偶校验控制和传输数据的长度等等。详细解释如下:
Bit
Name
R/W
POR
7
UARTEN
R/W
0
6
BNO
R/W
0
5
PREN
R/W
0
4
PRT
R/W
0
3
2
STOPS TXBRK
R/W
R/W
0
0
1
RX8
R
x
0
TX8
W
0
“x”:未知
Rev. 1.10
Bit 7
UARTEN:UART 功能使能位
0:UART 除能,TX 和 RX 脚处于浮空状态
1:UART 使能,TX 和 RX 脚作为 UART 功能引脚
此位为 UART 的使能位。UARTEN=0,UART 除能,RX 和 TX 处于浮空状态;
UARTEN=1,UART 使能,TX 和 RX 将分别由 TXEN 和 RXEN 控制。当 UART
被除能将清除缓冲器,所有缓冲器中的数据将被忽略,另外波特率计数器、错
误 和 状 态 标 志 位 被 复 位,TXEN、RXEN、TXBRK、RXIF、OERR、FERR、
PERR 和 NF 清零,而 TIDLE、TXIF 和 RIDLE 置位,UCR1、UCR2 和 BRG 寄
存器中的其它位保持不变。若 UART 工作时 UARTEN 清零,所有发送和接收将
停止,模块也将复位成上述状态。当 UART 再次使能时,它将在上次配置下重
新工作。
Bit 6
BNO:发送数据位数选择位
0:8-bit 传输数据
1:9-bit 传输数据
BNO 是发送数据位数选择位。BNO=1,传输数据为 9 位;BNO=0,传输数据为
8 位。若选择了 9 位数据传输格式,RX8 和 TX8 将分别存储接收和发送数据的
第 9 位。
Bit 5
PREN:奇偶校验使能位
0:奇偶校验除能
1:奇偶校验使能
此位为奇偶校验使能位。PREN=1,使能奇偶校验;PREN=0,除能奇偶校验。
Bit 4
PRT:奇偶校验选择位
0:偶校验
1:奇校验
奇偶校验选择位。PRT=1,奇校验;PRT=0,偶校验。
155
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 3
STOPS:停止位的长度选择位
0:有一位停止位
1:有两位停止位
此位用来设置停止位的长度。STOP=1,有两位停止位;STOP=0,只有一位停
止位。
Bit 2
TXBRK:暂停字发送控制位
0:没有暂停字要发送
1:发送暂停字
TXBRK 是暂停字发送控制位。TXBRK=0,没有暂停字要发送,TX 引脚正常操
作;TXBRK=1,将会发送暂停字,发送器将发送逻辑“0”。若 TXBRK 为高,
缓 冲 器 中 数 据 发 送 完 毕 后, 发 送 器 输 出 将 至 少 保 持 13 位 宽 的 低 电 平 直 至
TXBRK 复位。
Bit 1
RX8:接收 9-bit 数据传输格式中的第 9 位 ( 只读 )
此位只有在传输数据为 9 位的格式中有效,用来存储接收数据的第 9 位。BNO
是用来控制传输位数是 8 位还是 9 位。
Bit 0
TX8:发送 9-bit 数据传输格式中的第 9 位 ( 只写 )
此位只有在传输数据为 9 位的格式中有效,用来存储发送数据的第 9 位。BNO
是用来控制传输位数是 8 位还是 9 位。
UCR2 寄存器
UCR2 是 UART 的第二个控制寄存器,它的主要功能是控制发送器、接收器以
及各种 UART 中断源的使能或除能。它也可用来控制波特率,使能接收唤醒和
地址侦测。详细解释如下:
Bit
Name
R/W
POR
Rev. 1.10
7
TXEN
R/W
0
6
RXEN
R/W
0
5
4
3
BRGH ADDEN WAKE
R/W
R/W
R/W
0
0
0
2
RIE
R/W
0
1
TIIE
R/W
0
0
TEIE
R/W
0
Bit 7
TXEN:UART 发送使能位
0:UART 发送除能
1:UART 发送使能
此位为发送使能位。TXEN=0,发送将被除能,发送器立刻停止工作。另外发送
缓冲器将被复位,此时 TX 引脚将处于浮空状态。若 TXEN=1 且 UARTEN=1,
则发送将被使能,TX 引脚将由 UART 来控制。在数据传输时清除 TXEN 将中
止数据发送且复位发送器,此时 TX 引脚将处于浮空状态。
Bit 6
RXEN:UART 接收使能位
0:UART 接收除能
1:UART 接收使能
此位为接收使能位。RXEN=0,接收将被除能,接收器立刻停止工作。另外接
收 缓 冲 器 将 被 复 位, 此 时 RX 引 脚 将 处 于 浮 空 状 态。 若 RXEN=1 且
UARTEN=1,则接收将被使能,RX 引脚将由 UART 来控制。在数据传输时清
除 RXEN 将中止数据接收且复位接收器,此时 RX 引脚将处于浮空状态。
Bit 5
BRGH:波特率发生器高低速选择位
0:低速波特率
1:高速波特率
此位为波特率发生器高低速选择位,它和 BRG 寄存器一起控制 UART 的波特率。
BRGH=1,为高速模式;BRGH=0,为低速模式。
156
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 4
ADDEN:地址检测使能位
0:地址检测除能
1:地址检测使能
此位为地址检测使能和除能位。ADDEN=1,地址检测使能,此时数据的第 8 位
(BNO=0) 或第 9 位 (BNO=1) 为高,那么接到的是地址而非数据。若相应的中断
使能且接收到的值最高位为 1,那么中断请求标志将会被置位,若地址检测功能
使能且最高位为 0,那么将不会产生中断且收到的数据也会被忽略。
Bit 3
WAKE:RX 脚下降沿唤醒 UART 功能使能位
0:RX 脚下降沿唤醒 UART 功能除能
1:RX 脚下降沿唤醒 UART 功能使能
此位用于控制 RX 引脚下降沿时是否唤醒 UART 功能。此位仅当 UART 时钟源
fH 关闭时有效。若 UART 时钟源 fH 还开启,则无 RX 引脚唤醒 UART 功能无效。
若此位置高且 UART 时钟 fH 关闭,当 RX 引脚发生下降沿时会产生 UART 唤醒
请求。若相应的中断使能,将产生 RX 引脚唤醒 UART 的中断,以告知单片机
使其通过应用程序开启 UART 时钟源 fH,从而唤醒 UART 功能。否则,若此位
为低,即使 RX 引脚发生下降沿也无法恢复 UART 功能。
Bit 2
RIE:接收中断使能位
0:接收中断除能
1:接收中断使能
此位为接收中断使能或除能位。若 RIE=1,当 OERR 或 RXIF 置位时,UART 的
中断请求标志置位;若 RIE=0,UART 中断请求标志不受 OERR 和 RXIF 影响。
Bit 1
TIIE:发送器空闲中断使能位
0:发送器空闲中断除能
1:发送器空闲中断使能
此位为发送器空闲中断的使能或除能位。若 TIIE=1,当发送器空闲触发 TIDLE
置位时,UART 的中断请求标志置位;若 TIIE=0,UART 中断请求标志不受
TIDLE 的影响。
Bit 0
TEIE:发送寄存器为空中断使能位
0:发送寄存器为空中断除能
1:发送寄存器为空中断使能
此位为发送寄存器为空中断的使能或除能位。若 TEIE=1,当发送器为空触发
TXIF 置位时,UART 的中断请求标志置位;若 TEIE=0,UART 中断请求标志不
受 TXIF 的影响。
BRG 寄存器
Bit
Name
R/W
POR
7
BRG7
R/W
x
6
BRG6
R/W
x
5
BRG5
R/W
x
4
BRG4
R/W
x
3
BRG3
R/W
x
2
BRG2
R/W
x
1
BRG1
R/W
x
0
BRG0
R/W
x
“x”:未知
Bit 7~0
Rev. 1.10
BRG7~BRG0:波特率值
软件设置 BRGH 位(设置波特率发生器的速度)和 BRG 寄存器(设置波特率
的值),一起控制 UART 的波特率。
注:若 BRGH=0,波特率 = fH/[64×(N+1)];
若 BRGH=1,波特率 = fH/[16×(N+1)]。
157
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
波特率发生器
UART 自身具有一个波特率发生器,通过它可以设定数据传输速率。波特率是
由一个独立的内部 8 位计数器产生,它由 BRG 寄存器和 UCR2 寄存器的 BRGH
位来控制。BRGH 是决定波特率发生器处于高速模式还是低速模式,从而决定
计算公式的选用。BRG 寄存器的值 N 可根据下表中的公式计算,N 的范围是 0
到 255。
UCR2 的 BRGH 位
波特率 (BR)
0
fH / [64 (N+1)]
1
fH / [16 (N+1)]
为得到相应的波特率,首先需要设置 BRGH 来选择相应的计算公式从而算出
BRG 的值。由于 BRG 的值不连续,所以实际波特率和理论值之间有一个偏差。
下面举例怎样计算 BRG 寄存器中的值 N 和误差。
波特率和误差的计算
若选用 4MHz 时钟频率且 BRGH=0,若期望的波特率为 4800,计算它的 BRG
寄存器的值 N,实际波特率和误差。
根据上表,波特率 BR = fH / [64 (N+1)]
转换后的公式 N = [fH / (BR×64)] - 1
带入参数 N = [4000000 / (4800×64)] - 1 = 12.0208
取最接近的值,十进制 12 写入 BRG 寄存器,实际波特率如下
BR = 4000000 / [64 × (12+1)] = 4808
因此,误差 = (4808 - 4800) / 4800=0.16%
UART 模块的设置与控制
UART 采用标准的不归零码传输数据,这种方法通常被称为 NRZ 法。它由 1 位
起始位,8 位或 9 位数据位和 1 位或者两位停止位组成。奇偶校验是由硬件自
动完成的,可设置成奇校验、偶校验和无校验三种格式。常用的数据传输格式
由 8 位数据位,1 位停止位,无校验组成,用 8、N、1 表示,它是系统上电的
默认格式。数据位数、停止位数和奇偶校验由 UCR1 寄存器的 BNO、PRT、
PREN 和 STOPS 设定。用于数据发送和接收的波特率由一个内部的 8 位波特率
发送器产生,数据传输时低位在前高位在后。尽管 UART 发送器和接收器在功
能上相互独立,但它们使用相同的数据传输格式和波特率,在任何情况下,停
止位是必须的。
UART 的使能和除能
UART 是由 UCR1 寄存器的 UARTEN 位来使能和除能的。若 UARTEN、TXEN
和 RXEN 都为高,则 TX 和 RX 分别为 UART 的发送端口和接收端口。若没有
数据发送,TX 引脚默认状态为高电平。
UARTEN 清零将除能 TX 和 RX,通过设置相关引脚共用控制位,这两个引脚
可用作普通 I/O 口或其它引脚共用功能。当 UART 被除能时将清空缓冲器,所
有缓冲器中的数据将被忽略,另外一些使能控制、错误标志和状态标志将被复
位,如 TXEN、RXEN、TXBRK、RXIF、OERR、FERR、PERR 和 NF 清 零,
而 TIDLE、TXIF 和 RIDLE 置位,UCR1、UCR2 和 BRG 寄存器中的其它位保
持不变。若 UART 工作时 UARTEN 清零,所有发送和接收将停止,模块也将
复位成上述状态。当 UART 再次使能时,它将在上次配置下重新工作。
Rev. 1.10
158
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
数据位、停止位位数以及奇偶校验的选择
数据传输格式由数据长度、是否校验、校验类型、地址位以及停止位长度组成。
它们都是由 UCR1 寄存器的各个位控制的。BNO 决定数据传输是 8 位还是 9 位;
PRT 决定校验类型;PREN 决定是否选择奇偶校验;而 STOPS 决定选用 1 位还
是 2 位停止位。下表列出了各种数据传输格式。若地址检测功能使能,地址位,
即数据字节的最高位,用来确定此帧是地址还是数据。停止位的长度和数据位
的长度无关,且只有发送器需设置停止位长度。接收器只接收一个停止位。
起始位
8 位数据位
1
1
1
9 位数据位
1
1
1
数据位
地址位
校验位
停止位
8
7
7
0
0
1
0
1
0
1
1
1
9
8
8
0
0
1
0
1
0
1
1
1
发送和接收数据格式
下图是传输 8 位和 9 位数据的波形。
Parity Bit
Start Bit
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 6
Bit 7
8-bit data format
Start Bit
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Stop Bit
Next
Start
Bit
Parity Bit
Bit 8
Stop Bit
Next
Start
Bit
9-bit data format
UART 发送器
UCR1 寄存器的 BNO 位是控制数据传输的长度。BNO=1 其长度为 9 位,第 9
位 MSB 存 储 在 UCR1 寄 存 器 的 TX8 中。 发 送 器 的 核 心 是 发 送 移 位 寄 存 器
TSR,它的数据由发送寄存器 TXR_RXR 提供,应用程序只须将发送数据写入
TXR_RXR 寄存器。上组数据的停止位发出前,TSR 寄存器禁止写入。如果还
有新的数据要发送,一旦停止位发出,待发数据将会从 TXR_RXR 寄存器加载
到 TSR 寄存器。TSR 不像其它寄存器一样映射到数据存储器,所以应用程序不
能对其进行读写操作。TXEN=1,发送使能,但若 TXR_RXR 寄存器没有数据
或 者 波 特 率 没 有 设 置, 发 送 器 将 不 会 工 作。 先 写 TXR_RXR 寄 存 器 再 置 高
TXEN 也会触发发送。当发送器使能,若 TSR 寄存器为空,数据写入 TXR_
RXR 寄存器将会直接加载到 TSR 寄存器中。发送器工作时,TXEN 清零,发送
器将立刻停止工作并且复位,此时通过设置相关引脚共用控制位,TX 引脚用
作普通 I/O 口或其它引脚共用功能。
Rev. 1.10
159
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
发送数据
当 UART 发送数据时,数据从移位寄存器中移到 TX 引脚上,其低位在前高位
在后。在发送模式中,TXR_RXR 寄存器在内部总线和发送移位寄存器间形成
一个缓冲。如果选择 9 位数据传输格式,最高位 MSB 取自 UCR1 寄存器的
TX8。
发送器初始化可由如下步骤完成:
● 正确地设置 BNO、PRT、PREN 和 STOPS 位以确定数据长度、校验类型和停
止位长度。
● 设置 BRG 寄存器,选择期望的波特率。
● 置高 TXEN,使能 UART 发送器且使 TX 作为 UART 的发送端。
● 读取 USR 寄存器,然后将待发数据写入 TXR_RXR 寄存器。注意,此步骤会
清除 TXIF 标志位。
如果要发送多个数据只需重复上一步骤。
当 TXIF=0 时,数据将禁止写入 TXR_RXR 寄存器。可以通过以下步骤来清除
TXIF:
1. 读取 USR 寄存器
2. 写 TXR_RXR 寄存器
只读标志位 TXIF 由 UART 硬件置位。若 TXIF=1,TXR_RXR 寄存器为空,其
它数据可以写入而不会覆盖之前的数据。若 TEIE=1,TXIF 标志位会产生中断。
在数据传输时,写 TXR_RXR 指令会将待发数据暂存在 TXR_RXR 寄存器中,
当前数据发送完毕后,待发数据被加载到发送移位寄存器中。当发送器空闲时,
写 TXR_RXR 指令会将数据直接加载到 TSR 寄存器中,数据传输立刻开始且
TXIF 置位。当发送完停止位或暂停帧后,表示一帧数据已发送完毕,此时
TIDLE 位将被置位。
可以通过以下步骤来清除 TIDLE:
1. 读取 USR 寄存器
2. 写 TXR_RXR 寄存器
清除 TXIF 和 TIDLE 软件执行次序相同。
发送暂停字
若 TXBRK=1,下一帧将会发送暂停字。它是由一个起始位、13×N(N=1,
2……)位逻辑 0 组成。置位 TXBRK 将会发送暂停字,而清除 TXBRK 将产生
停止位,传输暂停字不会产生中断。需要注意的是,暂停字至少 13 位宽。若
TXBRK 持续为高,那么发送器会一直发送暂停字;当应用程序将 TXBRK 清零
后,发送器结束最后一帧暂停字的发送后接着发送一位或两位停止位。最后一
帧暂停字的结尾自动为高电平,以确保下一帧数据起始位的检测。
UART 接收器
UART 接收器支持 8 位或者 9 位数据接收。若 BNO=1,数据长度为 9 位,而最
高位 MSB 存放在 UCR1 寄存器的 TXR_RXR 中。接收器的核心是串行移位寄
存器 RSR。RX 引脚上的数据送入数据恢复器中,它在 16 倍波特率的频率下工
作,而串行移位器工作在正常波特率下。当在 RX 引脚上检测到停止位,若
TXR_RXR 寄存器为空,数据从 RSR 寄存器中加载到 TXR_RXR 寄存器。RX
引脚上的每一位数据会被采样三次以判断其逻辑状态。RSR 不像其它寄存器一
样映射在数据存储器,所以应用程序不能对其进行读写操作。
Rev. 1.10
160
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
接收数据
当 UART 接收数据时,数据低位在前高位在后,连续地从 RX 引脚进入移位寄
存器。TXR_RXR 寄存器在内部总线和接收移位寄存器间形成一个缓冲。TXR_
RXR 寄存器是一个两层的 FIFO 缓冲器,它能保存两帧数据的同时接收第三帧
数据,应用程序必须保证在接收完第三帧前读取 TXR_RXR 寄存器,否则忽略
第三帧数据并且发生溢出错误。
接收器的初始化可由如下步骤完成:
● 正确地设置 BNO、PRT 和 PREN 位以确定数据长度和校验类型。
● 设置 BRG 寄存器,选择期望的波特率。
● 置高 RXEN,使能 UART 发送器且使 RX 作为 UART 的接收端。
此时接收器被使能并检测起始位。
接收数据将会发生如下事件:
● 当 TXR_RXR 寄存器中包含有效数据时,USR 寄存器中的 RXIF 位将会置位,
溢出错误发生之前至多还有一帧数据可读。
● 若 RIE=1,数据从 RSR 寄存器加载到 TXR_RXR 寄存器中将产生中断。
● 若接收器检测到帧错误、噪声干扰错误、奇偶出错或溢出错误,那么相应的
错误标志位置位。
可以通过如下步骤来清除 RXIF:
1. 读取 USR 寄存器
2. 读取 TXR_RXR 寄存器
接收暂停字
UART 接收任何暂停字都会当作帧错误处理。接收器只根据 BNO 位的设置外加
一个停止位来确定一帧数据的长度。若暂停字位数大于 BNO 位指定的长度外
加一个停止位,接收器认为接收已完毕,RXIF 和 FERR 置位,TXR_RXR 寄存
器清 0,若相应的中断允许且 RIDLE 为高将会产生中断。暂停字只会被认为包
含信息 0 且会置位 FERR 标志位。如果检测到较长的暂停信号,接收器会将此
信号视为包含一个起始位、数据位和无效的停止位的数据帧并且置位 FERR 标
志位。在下个开始位到来之前,接收器必须等待一个有效的停止位。接收器不
会假定线上的暂停信号是下一个开始位。暂停字将会加载到缓冲器中,在接收
到停止位前不会再接收数据,没有检测到停止位也会置位只读标志位 RIDLE。
UART 接收到暂停字会产生以下事件:
● 帧错误标志位 FERR 置位。
● TXR_RXR 寄存器清零。
● OERR、NF、PERR、RIDLE 或 RXIF 可能会置位。
空闲状态
当 UART 接收数据时,即在起初位和停止位之间,USR 寄存器的接收状态标志
位 RIDLE 清零。在停止位和下一帧数据的起始位之间,RIDLE 被置位,表示
接收器空闲。
接收中断
USR 寄存器的只读标志位 RXIF 由接收器的边沿触发置位。若 RIE=1,数据从
移位寄存器 RSR 加载到 TXR_RXR 寄存器时产生中断,同样地,溢出也会产生
中断。
Rev. 1.10
161
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
接收错误处理
UART 会产生几种接收错误,下面部分将描述各错误以及怎样处理。
溢出 – OERR 标志
TXR_RXR 寄存器是一个两层的 FIFO 缓冲器,它能保存两帧数据的同时接收第
三帧数据,应用程序必须保证在接收完第三帧前读取 TXR_RXR 寄存器,否则
发生溢出错误。
产生溢出错误时将会发生以下事件:
● USR 寄存器中 OERR 被置位。
● TXR_RXR 寄存器中数据不会丢失。
● RSR 寄存器数据将会被覆盖。
● 若 RIE=1,将会产生中断。
先读取 USR 寄存器再读取 TXR_RXR 寄存器可将 OERR 清零。
噪声干扰 – NF 标志
数据恢复时多次采样可以有效的鉴别出噪声干扰。当检测到数据受到噪声干扰
时将会发生以下事件:
● 在 RXIF 上升沿,USR 寄存器中只读标志位 NF 置位。
● 数据从 RSR 寄存器加载到 TXR_RXR 寄存器中。
● 不产生中断,但此位置位发生在 RXIF 置位产生中断的同周期内。
先读取 USR 寄存器再读取 TXR_RXR 寄存器可将 NF 清零。
帧错误 – FERR 标志
若在停止位上检测到 0,USR 寄存器中只读标志 FERR 置位。若选择两位停止
位,此两位都必须为高,否则将置位 FERR。此标志位同接收的数据分别记录
在 USR 寄存器和 TXR_RXR 寄存器中,此标志位可被任何复位清零。
奇偶校验错误 – PERR 标志
若接收到数据出现奇偶校验错误,USR 寄存器中只读标志 PERR 置位。只有使
能了奇偶校验,选择了校验类型,此标志位才有效。此标志位同接收的数据分
别记录在 USR 寄存器和 TXR_RXR 寄存器中,此标志位可被任何复位清零。注
意,在读取相应的数据之前必须先访问 USR 寄存器中的 FERR 和 PERR 错误标
志位。
Rev. 1.10
162
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
UART 模块中断结构
几个独立的 UART 条件可以产生一个 UART 中断。当条件满足时,会产生一个
低脉冲信号。发送寄存器为空、发送器空闲、接收器数据有效、溢出和地址检
测和 RX 引脚唤醒都会产生中断。若 UART 中断允许且堆栈未满,程序将会跳
转到相应的中断向量执行中断服务程序,而后再返回主程序。其中四种情况,
若其 UCR2 寄存器中相应中断允许位被置位,则 USR 寄存器中对应中断标志位
将产生 UART 中断。发送器相关的两个中断情况有各自对应的中断允许位,而
接收器相关的两个中断情况共用一个中断允许位。这些允许位可用于禁止个别
的 UART 中断源。
地 址 检 测 也 是 UART 的 中 断 源, 它 没 有 相 应 的 标 志 位, 若 UCR2 寄 存 器 中
ADDEN=1, 当 检 测 到 地 址 将 会 产 生 UART 中 断。RX 引 脚 唤 醒 也 可 以 产 生
UART 中 断, 它 没 有 相 应 的 标 志 位, 当 UART 时 钟 源 fH 关 闭 且 UXR2 中 的
WAKE 和 RIE 位被置位,RX 引脚上有下降沿时会产生 UART 中断。
注意,USR 寄存器标志位为只读状态,软件不能对其进行设置,和其它一些中
断一样,在进入相应中断服务程序时也不能清除这些标志位。这些标志位仅在
UART 特定动作发生时才会自动被清除,详细解释见 UART 寄存器章节。整体
UART 中断的使能或除能可由中断控制寄存器中的相关中断使能控制位控制,
其中断请求由 UART 模块决定。
USR Register
UCR2 Register
Transmitter Empty Flag
TXIF
TEIE
Transmitter Idle Flag
TIDLE
TIIE
1
RIE
OR
Receiver Data Available
RXIF
WAKE
0
1
Receiver Overrun Flag
OERR
RX Pin
Wake-up
0
ADDEN
0
URE
0
1
EMI
0
1
Interrupt signal
to MCU
1
0
1
0
UART Interrupt
Request Flag
URF
0
1
RX7 if BNO=0
RX8 if BNO=1
1
UCR2 Register
UART 中断框图
Rev. 1.10
163
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
地址检测模式
置位 UCR2 寄存器中的 ADDEN 将启动地址检测模式。若此位为“1”,可产生
接收数据有效中断,其请求标志位为 RXIF。若 ADDEN 有效,只有在接收到数
据最高位为 1 才会产生中断,中断允许位 URE 和 EMI 也要使能才会产生中断。
地址的最高位为第 9 位 (BNO=1) 或第 8 位 (BNO=0),若此位为高,则接收到的
是地址而非数据。只有接收的数据的最后一位为高才会产生中断。若 ADDEN
除能,每接收到一个有效数据便会置位 RXIF,而不用考虑数据的最后一位。地
址检测和奇偶校验在功能上相互排斥,若地址检测模式使能,为了确保操作正
确,必须将奇偶校验使能位清零以除能奇偶校验。
ADDEN
0
1
Bit 9 (BNO=1)
Bit 8 (BNO=0)
0
1
0
1
产生 UART 中断
√
√
×
√
ADDEN 位功能
UART 模块暂停和唤醒
UART 时钟 fH 关闭后 UART 模块将停止运行。当传送数据时 UART 时钟 fH 关闭,
发送将停止直到 UART 模块时钟再次使能。同样地,当接收数据时单片机进入
空闲或休眠模式,数据接收也会停止。当单片机进入空闲或休眠模式,USR、
UCR1、UCR2、接收 / 发送寄存器以及 BRG 寄存器都不会受到影响。建议在单
片机进入空闲或休眠模式前先确保数据发送或接收已完成。
UART 功能中包括了 RX 引脚的唤醒功能,由 UCR2 寄存器中 WAKE 位控制。
当 UART 时钟 fH 关闭时,若 WAKE 位与 UART 允许位 UARTEN、接收器允许
位 RXEN 和接收器中断允许位 RIE 都被置位,则 RX 引脚的下降沿可触发产生
RX 引脚唤醒 UART 的中断。唤醒后系统需延时一段时间才能正常工作,在此
期间,RX 引脚上的任何数据将被忽略。
若要唤醒并产生 UART 中断,除了唤醒使能控制位和接收中断使能控制位需置
位外,全局中断允许位 EMI 和 UART 中断使能控制位 URE 也必须置位;若这
两控制位没有被置位,那么,单片机将可以被唤醒但不会产生中断。同样唤醒
后系统需一定的延时才能正常工作,然后才会产生 UART 中断。
Rev. 1.10
164
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
带 SCOM 功能的 LCD
该单片机具有驱动外部 LCD 面板的能力。LCD 驱动的 COM 脚 SCOM0~SCOM3
与 I/O 口共用。LCD 控制信号(COM 和 SEG)由软件编程实现。
LCD 操作
单片机通过设置输入 / 输出口作为 COM 引脚以驱动外部的液晶面板。LCD 驱
动功能是由 SCOMC 寄存器来控制,该寄存器除了可设置 LCD 的开启和关闭外
还可控制输出偏压值等功能,使得 COM 口输出 VDD/2 的电压,从而实现 1/2
bias LCD 的显示。
�
� �
� � � � �� � � � � ��� � �
� � � � � �
�
� �
��
� � � � �
� � � �
� �� � � � � � � � �� � ��
��� � �� ���
� � � � �
LCD COM 偏压
SCOMC 寄存器中的 SCOMEN 位是 LCD 驱动的主控制位,LCD 的 SCOMn 引
脚可通过正确配置相关的引脚共用功能选择寄存器用于 LCD 驱动。需注意的
是,端口控制寄存器不需要先设置为输出以使能 LCD 驱动操作。
LCD 偏压控制
LCD 驱动器可以提供多种驱动电流选择以适应不同 LCD 面板的需求。通过设
置 SCOMC 寄存器中 ISEL0 位和 ISEL1 位可以配置不同的偏压电阻以生成不同
的偏置电压。
SCOMC 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
ISEL1
R/W
0
5
ISEL0
R/W
0
4
SCOMEN
R/W
0
3
─
─
─
2
─
─
─
1
─
─
─
0
─
─
─
Bit 7
未定义,读为“0”
Bit 6~5
ISEL1~ISEL0:选择 R 型 LCD 的典型偏压电阻(VDD=5V)
00:2×100kΩ (1/2 Bias),IBIAS = 25μA@(VDD=5V)
01:2×50kΩ (1/2 Bias),IBIAS = 50μA@(VDD=5V)
10:2×25kΩ (1/2 Bias),IBIAS = 100μA@(VDD=5V)
11:2×12.5kΩ (1/2 Bias),IBIAS = 200μA@(VDD=5V)
Bit 4
SCOMEN:LCD 模块控制位
0:除能
1:使能
当 SCOMEN 位为高时,所选择的电阻将被开启以产生 1/2 VDD 的偏压。
Bit 3~0
未定义,读为“0”
165
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
中断
中断是单片机一个重要功能。当外部事件或内部功能如定时器模块或 A/D 转换
器有效,并且产生中断时,系统会暂时中止当前的程序而转到执行相对应的中
断服务程序。此系列单片机提供多个外部中断和内部中断功能,外部中断由
INTn 引脚动作产生,而内部中断由各种内部功能,如定时器模块、比较器、时
基、LVD、EEPROM、SIM、UART 和 A/D 转换器等产生。
中断寄存器
中断控制基本上是在一定单片机条件发生时设置请求标志位,应用程序中中断
使能位的设置是通过位于专用数据存储器中的一系列寄存器控制的。寄存器总
的分为三类。第一类是 INTC0~INTC2 寄存器,用于设置基本的中断;第二类
是 MFI0~MFI2 寄存器,用于设置多功能中断;最后一种为 INTEG 寄存器,用
于设置外部中断边沿触发类型。
寄存器中含有中断控制位和中断请求标志位。中断控制位用于使能或除能各种
中断,中断请求标志位用于存放当前中断请求的状态。它们都按照特定的模式
命名,前面表示中断类型的缩写,紧接着的字母“E”代表使能 / 除能位,“F”
代表请求标志位。
功能
总中断
INTn 脚
比较器
多功能中断
A/D 转换器
时基
SIM
UART
LVD
EEPROM
CTM
STM
PTM
使能位
EMI
INTnE
CPE
MFnE
ADE
TBnE
SIME
URE
LVE
DEE
CTMPE
CTMAE
STMPE
STMAE
PTMPE
PTMAE
请求标志
─
INTnF
CPF
MFnF
ADF
TBnF
SIMF
URF
LVF
DEF
CTMPF
CTMAF
STMPF
STMAF
PTMPF
PTMAF
注释
─
n=0 或 1
─
n=0~2
─
n=0 或 1
─
─
─
─
─
─
─
中断寄存器位命名模式
Rev. 1.10
166
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
寄存器
名称
INTEG
INTC0
INTC1
INTC2
MFI0
MFI1
MFI2
位
7
6
5
4
3
2
1
0
─
─
─
─
INT1S1 INT1S0 INT0S1 INT0S0
─
MF0F
CPF
INT0F MF0E
CPE
INT0E
EMI
TB0F
ADF
MF2F
MF1F
TB0E
ADE
MF2E MF1E
URF
SIMF INT1F TB1F
URE
SIME INT1E TB1E
─
─
STMAF STMPF
─
─
STMAE STMPE
CTMAF CTMPF PTMAF PTMPF CTMAE CTMPE PTMAE PTMPE
─
─
DEF
LVF
─
─
DEE
LVE
中断寄存器列表
INTEG 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
2
1
0
INT1S1 INT1S0 INT0S1 INT0S0
R/W
R/W
R/W
R/W
0
0
0
0
Bit 7~4
未定义,读为“0”
Bit 3~2
INT1S1~INT1S0:INT1 脚中断边沿控制位
00:除能
01:上升沿
10:下降沿
11:双沿
Bit 1~0
INT0S1~INT0S0:INT0 脚中断边沿控制位
00:除能
01:上升沿
10:下降沿
11:双沿
INTC0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
MF0F
R/W
0
5
CPF
R/W
0
4
INT0F
R/W
0
Bit 7
未定义,读为“0”
Bit 6
MF0F:多功能中断 0 请求标志位
0:无请求
1:中断请求
Bit 5
CPF:比较器中断请求标志位
0:无请求
1:中断请求
Bit 4
INT0F:INT0 中断请求标志位
0:无请求
1:中断请求
Bit 3
MF0E:多功能中断 0 控制位
0:除能
1:使能
167
3
MF0E
R/W
0
2
CPE
R/W
0
1
INT0E
R/W
0
0
EMI
R/W
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 2
CPE:比较器中断控制位
0:除能
1:使能
Bit 1
INT0E:INT0 中断控制位
0:除能
1:使能
Bit 0
EMI:总中断控制位
0:除能
1:使能
INTC1 寄存器
Bit
Name
R/W
POR
7
TB0F
R/W
0
6
ADF
R/W
0
5
MF2F
R/W
0
4
MF1F
R/W
0
Bit 7
TB0F:时基 0 中断请求标志位
0:无请求
1:中断请求
Bit 6
ADF:A/D 转换器中断请求标志位
0:无请求
1:中断请求
Bit 5
MF2F:多功能中断 2 中断请求标志位
0:无请求
1:中断请求
Bit 4
MF1F:多功能中断 1 中断请求标志位
0:无请求
1:中断请求
Bit 3
TB0E:时基 0 中断控制位
0:除能
1:使能
Bit 2
ADE:A/D 转换器中断控制位
0:除能
1:使能
Bit 1
MF2E:多功能中断 2 中断控制位
0:除能
1:使能
Bit 0
MF1E:多功能中断 1 中断控制位
0:除能
1:使能
3
TB0E
R/W
0
2
ADE
R/W
0
1
MF2E
R/W
0
0
MF1E
R/W
0
3
URE
R/W
0
2
SIME
R/W
0
1
INT1E
R/W
0
0
TB1E
R/W
0
INTC2 寄存器
Bit
Name
R/W
POR
Bit 7
Rev. 1.10
7
URF
R/W
0
6
SIMF
R/W
0
5
INT1F
R/W
0
4
TB1F
R/W
0
URF:UART 中断请求标志位
0:无请求
1:中断请求
168
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Bit 6
SIMF:SIM 中断请求标志位
0:无请求
1:中断请求
Bit 5
INT1F:INT1 中断请求标志位
0:无请求
1:中断请求
Bit 4
TB1F:时基 1 中断请求标志位
0:无请求
1:中断请求
Bit 3
URE:UART 中断控制位
0:除能
1:使能
Bit 2
SIME:SIM 中断控制位
0:除能
1:使能
Bit 1
INT1E:INT1 中断控制位
0:除能
1:使能
Bit 0
TB1E:时基 1 中断控制位
0:除能
1:使能
MFI0 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
4
STMAF STMPF
R/W
R/W
0
0
3
─
─
─
Bit 7~6
未定义,读为“0”
Bit 5
STMAF:STM 比较器 A 匹配中断请求标志位
0:无请求
1:中断请求
Bit 4
STMPF:STM 比较器 P 匹配中断请求标志位
0:无请求
1:中断请求
Bit 3~2
未定义,读为“0”
Bit 1
STMAE:STM 比较器 A 匹配中断控制位
0:除能
1:使能
Bit 0
STMPE:STM 比较器 P 匹配中断控制位
0:除能
1:使能
169
2
─
─
─
1
0
STMAE STMPE
R/W
R/W
0
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
MFI1 寄存器
Bit
Name
R/W
POR
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
7
6
5
4
3
2
1
0
CTMAF CTMPF PTMAF PTMPF CTMAE CTMPE PTMAE PTMPE
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
0
0
0
0
0
0
0
0
CTMAF:CTM 比较器 A 匹配中断请求标志位
0:无请求
1:中断请求
CTMPF:CTM 比较器 P 匹配中断请求标志位
0:无请求
1:中断请求
PTMAF:PTM 比较器 A 匹配中断请求标志位
0:无请求
1:中断请求
PTMPF:PTM 比较器 P 匹配中断请求标志位
0:无请求
1:中断请求
CTMAE:CTM 比较器 A 匹配中断控制位
0:除能
1:使能
CTMPE:CTM 比较器 P 匹配中断控制位
0:除能
1:使能
PTMAE:PTM 比较器 A 匹配中断控制位
0:除能
1:使能
PTMPE:PTM 比较器 P 匹配中断控制位
0:除能
1:使能
MFI2 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
DEF
R/W
0
4
LVF
R/W
0
Bit 7~6
未定义,读为“0”
Bit 5
DEF:数据 EEPROM 写中断请求标志位
0:无请求
1:中断请求
Bit 4
LVF:LVD 中断请求标志位
0:无请求
1:中断请求
Bit 3~2
未定义,读为“0”
Bit 1
DEE:数据 EEPROM 写中断控制位
0:除能
1:使能
Bit 0
LVE:LVD 中断控制位
0:除能
1:使能
170
3
─
─
─
2
─
─
─
1
DEE
R/W
0
0
LVE
R/W
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
中断操作
若中断事件条件产生,如一个 TM 比较器 P、比较器 A 匹配或 A/D 转换结束等
等,相关中断请求标志将置起。中断标志产生后程序是否会跳转至相关中断向
量执行是由中断使能位的条件决定的。若使能位为“1”,程序将跳至相关中断
向量中执行;若使能位为“0”,即使中断请求标志置起中断也不会发生,程序
也不会跳转至相关中断向量执行。若总中断使能位为“0”,所有中断都将除能。
当中断发生时,下条指令的地址将被压入堆栈。相应的中断向量地址加载至 PC
中。系统将从此向量取下条指令。中断向量处通常为跳转指令,以跳转到相应
的中断服务程序。中断服务程序必须以“RETI”指令返回至主程序,以继续执
行原来的程序。
各个中断使能位以及相应的请求标志位,以优先级的次序显示在下图。一些中
断源有自己的向量,但是有些中断却共用多功能中断向量。一旦中断子程序被
响应,系统将自动清除 EMI 位,所有其它的中断将被屏蔽,这个方式可以防止
任何进一步的中断嵌套。其它中断请求可能发生在此期间,虽然中断不会立即
响应,但是中断请求标志位会被记录。
如果某个中断服务子程序正在执行时,有另一个中断要求立即响应,那么 EMI
位应在程序进入中断子程序后置位,以允许此中断嵌套。如果堆栈已满,即使
此中断使能,中断请求也不会被响应,直到 SP 减少为止。如果要求立刻动作,
则堆栈必须避免成为储满状态。请求同时发生时,执行优先级如下流程图所示。
所有被置起的中断请求标志都可把单片机从休眠或空闲模式中唤醒,若要防止
唤醒动作发生,在单片机进入休眠或空闲模式前应将相应的标志置起。
Legend
xxF
Request Flag, no auto reset in ISR
xxF
Request Flag, auto reset in ISR
xxE
Enable Bits
EMI auto disabled
in ISR
Interrupt
Name
INT0 Pin
Request
Flags
INT0F
Enable
Bits
INT0E
Master
Enable
EMI
Vector
Comparator
CPF
CPE
EMI
08H
M. Funct. 0
MF0F
MF0E
EMI
0CH
M. Funct. 1
MF1F
MF1E
EMI
10H
04H
STMP
STMPF
STMPE
STMA
STMAF
STMAE
PTMP
PTMPF
PTMPE
PTMA
PTMAF
PTMAE
CTMP
CTMPF
CTMPE
CTMA
CTMAF
CTMAE
M. Funct. 2
MF2F
MF2E
EMI
14H
LVD
LVF
LVE
A/D Converter
ADF
ADE
EMI
18H
EEPROM
DEF
DEE
Time Base 0
TB0F
TB0E
EMI
1CH
Time Base 1
TB1F
TB1E
EMI
20H
INT1 Pin
INT1F
INT1E
EMI
24H
SIM
SIMF
SIME
EMI
28H
UART
URF
URE
EMI
2CH
Interrupts contained within
Multi-Function Interrupts
Priority
High
Low
中断结构
Rev. 1.10
171
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
外部中断
通过 INTn 引脚上的信号变化可控制外部中断。当触发沿选择位设置好触发类
型,INTn 引脚的状态发生变化,外部中断请求标志 INTnF 被置位时外部中断
请求产生。若要跳转到相应中断向量地址,总中断控制位 EMI 和相应中断使能
位 INTnE 需先被置位。此外,必须使用 INTEG 寄存器使能外部中断功能并选
择触发沿类型。外部中断引脚和普通 I/O 口共用,如果相应寄存器中的中断使
能位被置位,此引脚将被作为外部中断脚使用。此时该引脚必须通过设置控制
寄存器,将该引脚设置为输入口。当中断使能,堆栈未满并且外部中断脚状态
改变,将调用外部中断向量子程序。当响应外部中断服务子程序时,中断请求
标志位 INTnF 会自动复位且 EMI 位会被清零以除能其它中断。注意,即使此引
脚被用作外部中断输入,其上拉电阻选择仍保持有效。
寄存器 INTEG 被用来选择有效的边沿类型,来触发外部中断。可以选择上升沿
还是下降沿或双沿触发都产生外部中断。注意 INTEG 也可以用来除能外部中断
功能。
比较器中断
比较器中断由内部比较器控制。当比较器输出位状态改变,比较器中断请求标
志 CPF 被置位,比较器中断请求产生。若要跳转到相应中断向量地址,总中断
控制位 EMI 和比较器中断使能位 CPE 需先被置位。当中断使能,堆栈未满并
且比较器输入产生一个比较器输出变化时,将调用比较器中断向量子程序。当
响应中断服务子程序时,外部中断请求标志位会自动复位且 EMI 位会被清零以
除能其它中断。
多功能中断
此单片机中有三个多功能中断,与其它中断不同,它没有独立源,但由其它现
有的中断源构成,即 TM 中断,LVD 中断和 EEPROM 中断。
当多功能中断中任何一种中断请求标志 MFnF 被置位,多功能中断请求产生。
当中断使能,堆栈未满,包括在多功能中断中的任意一个中断发生时,将调用
多功能中断向量中的一个子程序。当响应中断服务子程序时,相关的多功能请
求标志位会自动复位且 EMI 位会自动清零以除能其它中断。
但必须注意的是,在中断响应时,虽然多功能中断标志会自动复位,但多功能
中断源的请求标志位,即 TM 中断,LVD 中断和 EEPROM 中断的请求标志位
不会自动复位,必须由应用程序清零。
A/D 转换器中断
A/D 转换器中断由 A/D 转换动作的结束来控制。当 A/D 转换器中断请求标志被
置位,即 A/D 转换过程完成时,中断请求发生。当总中断使能位 EMI 和 A/D
中断使能位 ADE 被置位,允许程序跳转到各自的中断向量地址。当中断使能,
堆栈未满且 A/D 转换动作结束时,将调用它们各自的中断向量子程序。当响应
中断服务子程序时,相应的中断请求标志位 ADF 会自动清零。EMI 位也会被
清零以除能其它中断。
Rev. 1.10
172
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
时基中断
时基中断提供一个固定周期的中断信号,由各自的定时器功能产生溢出信号控
制。当各自的中断请求标志 TB0F 或 TB1F 被置位时,中断请求发生。当总中
断使能位 EMI 和时基使能位 TB0E 或 TB1E 被置位,允许程序跳转到各自的中
断向量地址。当中断使能,堆栈未满且时基溢出时,将调用它们各自的中断向
量子程序。当响应中断服务子程序时,相应的中断请求标志位 TB0F 或 TB1F
会自动复位且 EMI 位会被清零以除能其它中断。
时基中断的目的是提供一个固定周期的中断信号,时钟源 fPSC0 或 fPSC1SK 可通过
PSC0R 或 PSC1R 寄存器选择来自内部时钟源 fSYS,fSYS/4 或 fSUB。选择的输入时
钟首先经过分频器,分频率由程序设置 TB0C 或 TB1C 寄存器相关位获取合适
的分频值以提供更长的时基中断周期。
fSYS
fSYS/4
fSUB
M
U
X
fPSC0
TB0ON
fPSC0/28 ~ fPSC0/215
Prescaler 0
M
U
X
TB0[2:0]
CLKSEL0[1:0]
fSYS
fSYS/4
fSUB
M
U
X
fPSC1
Time Base 0 Interrupt
fPSC1/28 ~ fPSC1/215
Prescaler 1
M
U
X
TB1ON
CLKSEL1[1:0]
Time Base 1 Interrupt
TB1[2:0]
时基中断
PSC0R 寄存器
Bit
Name
R/W
POR
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
─
─
─
2
─
─
─
Bit 7~2
未定义,读为“0”
Bit 1~0
CLKSEL01~CLKSEL00:预分频器 0 时钟源选择
00:fSYS
01:fSYS/4
1x:fSUB
1
0
CLKSEL01 CLKSEL00
R/W
R/W
0
0
PSC1R 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
─
─
─
4
─
─
─
3
─
─
─
2
─
─
─
Bit 7~2
未定义,读为“0”
Bit 1~0
CLKSEL11~CLKSEL10:预分频器 1 时钟源选择
00:fSYS
01:fSYS/4
1x:fSUB
173
1
CLKSEL11
R/W
0
0
CLKSEL10
R/W
0
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
TB0C 寄存器
Bit
Name
R/W
POR
7
TB0ON
R/W
0
6
─
─
─
5
─
─
─
4
─
─
─
Bit 7
TB0ON:时基 0 控制位
0:除能
1:使能
Bit 6~3
未定义,读为“0”
Bit 2~0
TB02~TB00:时基 0 溢出周期选择位
000:28/fPSC0
001:29/fPSC0
010:210/fPSC0
011:211/fPSC0
100:212/fPSC0
101:213/fPSC0
110:214/fPSC0
111:215/fPSC0
3
─
─
─
2
TB02
R/W
0
1
TB01
R/W
0
0
TB00
R/W
0
3
─
─
─
2
TB12
R/W
0
1
TB11
R/W
0
0
TB10
R/W
0
TB1C 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
TB1ON
R/W
0
6
─
─
─
5
─
─
─
4
─
─
─
Bit 7
TB1ON:时基 1 控制位
0:除能
1:使能
Bit 6~3
未定义,读为“0”
Bit 2~0
TB12~TB10:时基 1 溢出周期选择位
000:28/fPSC1
001:29/fPSC1
010:210/fPSC1
011:211/fPSC1
100:212/fPSC1
101:213/fPSC1
110:214/fPSC1
111:215/fPSC1
174
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
EEPROM 中断
EEPROM 中断属于多功能中断。当写周期结束,EEPROM 中断请求标志 DEF
被置位,EEPROM 中断请求产生。若要程序跳转到相应中断向量地址,总中断
控制位 EMI、EEPROM 中断使能位 DEE 和相应多功能中断使能位需先被置位。
当中断使能,堆栈未满且 EEPROM 写周期结束时,可跳转至相关多功能中断向
量子程序中执行。当 EEPROM 中断响应,EMI 将被自动清零以除能其它中断,
多功能中断请求标志也可自动清除,但 DEF 标志需在应用程序中手动清除。
LVD 中断
LVD 中断属于多功能中断。当低电压检测功能检测到一个低电压时,LVD 中断
请求标志 LVF 被置位,LVD 中断请求产生。若要程序跳转到相应中断向量地址,
总中断控制位 EMI、低电压中断使能位 LVE 和相应多功能中断使能位需先被置
位。当中断使能,堆栈未满且低电压条件发生时,可跳转至相关多功能中断向
量子程序中执行。当低电压中断响应,EMI 将被自动清零以除能其它中断,多
功能中断请求标志也可自动清除,但 LVF 标志需在应用程序中手动清除。
TM 中断
简易型、标准型和周期型 TM 各有两个中断。所有的 TM 中断都属于多功能中
断。每个 TM 各有两个中断请求标志位及两个使能位。当 TM 比较器 P、A 匹
配情况发生时,任意 TM 中断请求标志被置位,TM 中断请求产生。
若要程序跳转到相应中断向量地址,总中断控制位 EMI、相应 TM 中断使能位
和相关多功能中断使能位 MFnE 需先被置位。当中断使能,堆栈未满且 TM 比
较器匹配情况发生时,可跳转至相关多功能中断向量子程序中执行。当 TM 中
断响应,EMI 将被自动清零以除能其它中断,相关 MFnF 标志也可自动清除,
但 TM 中断请求标志需在应用程序中手动清除。
SIM 中断
串行接口模块中断,即 SIM 中断。当一个字节数据已由 SIM 接口接收或发送完,
或 I2C 从机地址匹配,或 I2C 超时,中断请求标志 SIMF 被置位,SIM 中断请求
产生。若要程序跳转到相应中断向量地址,总中断控制位 EMI 和串行接口中断
使能位 SIME 需先被置位。当中断使能,堆栈未满且以上任一种情况发生时,
可跳转至相关多功能中断向量子程序中执行。当响应中断服务子程序时,串行
接口中断标志位 SIMF 会自动复位且 EMI 将被自动清零以除能其它中断。
UART 中断
UART 模块中,发送器为空、发送器空闲、接收器数据有效、接收器溢出、地
址检测和 RX 引脚唤醒都会触发产生 UART 中断。当整体 UART 中断请求标志
位被置位,即以上任何一种情况发生时,中断请求发生。当总中断使能位 EMI
和 UART 中断使能位 URE 被置位,允许程序跳转到相应的中断向量地址。当
中断使能,堆栈未满且以上任何一种情况发生时,将调用 UART 中断向量子程
序。当响应中断服务子程序时,相应的中断请求标志位 URF 会自动清零。EMI
位也会被清零以除能其它中断。而 UART 模块中的只读中断标志位仅在 UART
特定动作发生时才会自动被清除。更多关于 UART 中断的细节请参考 UART 章
节。
Rev. 1.10
175
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
中断唤醒功能
每个中断都具有将处于休眠或空闲模式的单片机唤醒的能力。当中断请求标志
由低到高转换时唤醒动作产生,其与中断是否使能无关。因此,尽管单片机处
于休眠或空闲模式且系统振荡器停止工作,如有外部中断脚上产生外部边沿跳
变,低电压或比较器输入改变都可能导致其相应的中断标志被置位,由此产生
中断,因此必须注意避免伪唤醒情况的发生。若中断唤醒功能被除能,单片机
进入休眠或空闲模式前相应中断请求标志应被置起。中断唤醒功能不受中断使
能位的影响。
编程注意事项
通过禁止相关中断使能位,可以屏蔽中断请求,然而,一旦中断请求标志位被
设定,它们会被保留在中断控制寄存器内,直到相应的中断服务子程序执行或
请求标志位被软件指令清除。
多功能中断中所含中断相应程序执行时,多功能中断请求标志 MFnF 可以自动
清零,但各自的请求标志需在应用程序中手动清除。
建议在中断服务子程序中不要使用“CALL 子程序”指令。中断通常发生在不
可预料的情况或是需要立刻执行的某些应用。假如只剩下一层堆栈且没有控制
好中断,当“CALL 子程序”在中断服务子程序中执行时,将破坏原来的控制
序列。
所有中断在休眠或空闲模式下都具有唤醒功能,当中断请求标志发生由低到高
的转变时都可产生唤醒功能。若要避免相应中断产生唤醒动作,在单片机进入
休眠或空闲模式前需先将相应请求标志置为高。
当进入中断服务程序,系统仅将程序计数器的内容压入堆栈,如果中断服务程
序会改变状态寄存器或其它的寄存器的内容而破坏控制流程,应事先将这些数
据保存起来。
若从中断子程序中返回可执行 RET 或 RETI 指令。除了能返回至主程序外,
RETI 指令还能自动设置 EMI 位为高,允许进一步中断。RET 指令只能返回至
主程序,清除 EMI 位,除能进一步中断。
Rev. 1.10
176
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
低电压检测 – LVD
此单片机具有低电压检测功能,即 LVD。该功能使能用于监测电源电压 VDD,
若电源电压低于一定值可提供一个警告信号。此功能在电池类产品中非常有用,
在电池电压较低时产生警告信号。低电压检测也可产生中断信号。
LVD 寄存器
低电压检测功能由 LVDC 寄存器控制。VLVD2~VLVD0 位用于选择 8 个固定的
电压中的一个参考点。LVDO 位被置位时低电压情况发生,若 LVDO 位为低表
明 VDD 电压工作在当前所设置低电压水平值之上。LVDEN 位用于控制低电压
检测功能的开启 / 关闭,设置此位为高使能此功能,反之,关闭内部低电压检
测电路。低电压检测会有一定的功耗,在不使用时可考虑关闭此功能,此举在
功耗要求严格的电池供电应用中值得考虑。
LVDC 寄存器
Bit
Name
R/W
POR
Rev. 1.10
7
─
─
─
6
─
─
─
5
LVDO
R
0
Bit 7~6
未定义,读为“0”
Bit 5
LVDO:LVD 输出标志位
0:未检测到低电压
1:检测到低电压
Bit 4
LVDEN:低电压检测控制位
0:除能
1:使能
4
LVDEN
R/W
0
3
D3
R/W
0
2
1
0
VLVD2 VLVD1 VLVD0
R/W
R/W
R/W
0
0
0
Bit 3
此位建议固定为”0”。若置为高,将会增加不必要的功耗。
Bit 2~0
VLVD2~VLVD0:选择 LVD 电压位
000:1.8V
001:2.0V
010:2.4V
011:2.7V
100:3.0V
101:3.3V
110:3.6V
111:4.0V
177
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LVD 操作
通过比较电源电压 VDD 与存储在 LVDC 寄存器中的预置电压值的结果,低电压
检测功能工作。其设置的范围为 1.8V~4.0V。当电源电压 VDD 低于预置电压值
时,LVDO 位被置为高,表明低电压产生。低电压检测功能由一个自动使能的
参考电压提供。在休眠模式下,即使 LVDEN 位为高,低电压检测器也会除能。
低电压检测器使能后,读取 LVDO 位前,电路稳定需要一定的延时 tLVDS。注意,
VDD 电压可能上升或下降比较缓慢,在 VLVD 电压值附近时,LVDO 位可能有多
种变化。
VLVDIN or VDD
VLVD
LVDEN
LVDO
tLVDS
LVD 操作
低电压检测器也有自己的中断功能,属于多功能中断的一种,它是除了轮询
LVDO 位之外的另一种检测低电压的方法。中断条件产生置位 LVDO 并延时
tLVD 后,中断产生。此种情况下,若 VDD 降至小于 LVD 预置电压值时,中断请
求标志位 LVF 将被置位,中断产生,单片机将从休眠或空闲模式中被唤醒。若
不要求低电压检测的唤醒功能使能,在单片机进入休眠或空闲模式前应将 LVF
标志置为高。
Rev. 1.10
178
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
配置选项
配置选项在烧写程序时写入芯片。通过 HT-IDE 的软件开发环境,使用者在开
发过程中可以选择配置选项。由于使用的是硬件工具将配置选项烧入单片机,
之后无法再通过应用程序修改。所有的选项必须按系统的需要定义,具体内容
可参考下表:
序号
选项
振荡器选项
HIRC 频率选择 ( 仅用于烧录器调整或 EV 调整代码时使用 )
4MHz
1
8MHz
12MHz
HXT 模式选择(用于低电压模式):
2
由应用程序选择
HXT > 10MHz 或 ≤ 8MHz @ 1.8V
Rev. 1.10
179
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
应用电路
VDD
VDD
0.1µF
VSS
OSC
Circuit
OSC1
OSC2
See Oscillator
Section
OSC
Circuit
PA0~PA7
PB0~PB7
PC0~PC7
PD0~PD6
PE0~PE4
PF0~PF7
XT1
XT2
See Oscillator
Section
Rev. 1.10
180
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
指令集
简介
任何单片机成功运作的核心在于它的指令集,此指令集为一组程序指令码,用
来指导单片机如何去执行指定的工作。在 HOLTEK 单片机中,提供了丰富且灵
活的指令,共超过六十条,程序设计者可以事半功倍地实现他们的应用。
为了更加容易理解各种各样的指令码,接下来按功能分组介绍它们。
指令周期
大部分的操作均只需要一个指令周期来执行。分支、调用或查表则需要两个指
令周期。一个指令周期相当于四个系统时钟周期,因此如果在 8MHz 的系统时
钟振荡器下,大部分的操作将在 0.5μs 中执行完成,而分支或调用操作则将在
1μs 中执行完成。虽然需要两个指令周期的指令通常指的是 JMP、CALL、
RET、RETI 和查表指令,但如果牵涉到程序计数器低字节寄存器 PCL 也将多
花费一个周期去加以执行。即指令改变 PCL 的内容进而导致直接跳转至新地址
时,需要多一个周期去执行,例如“CLR PCL”或“MOV PCL,A”指令。对
于跳转指令必须注意的是,如果比较的结果牵涉到跳转动作将多花费一个周期,
如果没有则需一个周期即可。
数据的传送
单片机程序中数据传送是使用最为频繁的操作之一,使用几种 MOV 的指令,
数据不但可以从寄存器转移至累加器 ( 反之亦然 ),而且能够直接移动立即数到
累加器。数据传送最重要的应用之一是从输入端口接收数据或传送数据到输出
端口。
算术运算
算术运算和数据处理是大部分单片机应用所必需具备的能力,在盛群单片机内
部的指令集中,可直接实现加与减的运算。当加法的结果超出 255 或减法的结
果 少 于 0 时, 要 注 意 正 确 的 处 理 进 位 和 借 位 的 问 题。INC、INCA、DEC 和
DECA 指令提供了对一个指定地址的值加一或减一的功能。
逻辑和移位运算
标准逻辑运算例如 AND、OR、XOR 和 CPL 全都包含在盛群单片机内部的指令
集中。大多数牵涉到数据运算的指令,数据的传送必须通过累加器。在所有逻
辑数据运算中,如果运算结果为零,则零标志位将被置位,另外逻辑数据运用
形式还有移位指令,例如 RR、RL、RRC 和 RLC 提供了向左或向右移动一位的
方法。不同的移位指令可满足不同的应用需要。移位指令常用于串行端口的程
序应用,数据可从内部寄存器转移至进位标志位,而此位则可被检验,移位运
算还可应用在乘法与除法的运算组成中。
Rev. 1.10
181
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
分支和控制转换
程序分支是采取使用 JMP 指令跳转至指定地址或使用 CALL 指令调用子程序的
形式,两者之不同在于当子程序被执行完毕后,程序必须马上返回原来的地址。
这个动作是由放置在子程序里的返回指令 RET 来实现,它可使程序跳回 CALL
指令之后的地址。在 JMP 指令中,程序则只是跳到一个指定的地址而已,并不
需如 CALL 指令般跳回。一个非常有用的分支指令是条件跳转,跳转条件是由
数据存储器或指定位来加以决定。遵循跳转条件,程序将继续执行下一条指令
或略过且跳转至接下来的指令。这些分支指令是程序走向的关键,跳转条件可
能是外部开关输入,或是内部数据位的值。
位运算
提供数据存储器中单个位的运算指令是盛群单片机的特性之一。这特性对于输
出端口位的设置尤其有用,其中个别的位或端口的引脚可以使用“SET [m].i”
或“CLR [m].i”指令来设定其为高位或低位。如果没有这特性,程序设计师必
须先读入输出口的 8 位数据,处理这些数据,然后再输出正确的新数据。这种
读入 - 修改 - 写出的过程现在则被位运算指令所取代。
查表运算
数据的储存通常由寄存器完成,然而当处理大量固定的数据时,它的存储量常
常造成对个别存储器的不便。为了改善此问题,盛群单片机允许在程序存储器
中建立一个表格作为数据可直接存储的区域,只需要一组简易的指令即可对数
据进行查表。
其它运算
除了上述功能指令外,其它指令还包括用于省电的“HALT”指令和使程序在极
端电压或电磁环境下仍能正常工作的看门狗定时器控制指令。这些指令的使用
则请查阅相关的章节。
Rev. 1.10
182
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
指令集概要
当要操作的数据存储器位于数据存储器 Sector 0 时,下表说明了与数据存储器
存取有关的指令。
惯例
x:立即数
m:数据存储器地址
A:累加器
i:第 0~7 位
addr:程序存储器地址
助记符
说明
指令
周期
影响标志位
1
Z,C,AC,OV,
SC
1注
Z,C,AC,OV,
SC
1
Z,C,AC,OV,
SC
1
Z,C,AC,OV,
SC
1注
Z,C,AC,OV,
SC
算术运算
ADD
A,[m] ACC 与数据存储器相加,结果放入 ACC
ADDM A,[m] ACC 与数据存储器相加,结果放入数据存储器
ADD
ADC
A,x ACC 与立即数相加,结果放入 ACC
A,[m] ACC 与数据存储器、进位标志相加,结果放入 ACC
ADCM A,[m] ACC 与数据存储器、进位标志相加,结果放入数据存储器
SUB
A,x ACC 与立即数相减,结果放入 ACC
1
Z,C,AC,OV,
SC,CZ
SUB
A,[m] ACC 与数据存储器相减,结果放入 ACC
1
Z,C,AC,OV,
SC,CZ
1注
Z,C,AC,OV,
SC,CZ
1
Z,C,AC,OV,
SC,CZ
1注
Z,C,AC,OV,
SC,CZ
1
Z,C,AC,OV,
SC,CZ
SUBM A,[m] ACC 与数据存储器相减,结果放入数据存储器
SBC
A,[m] ACC 与数据存储器、进位标志的反相减,结果放入 ACC
SBCM A,[m] ACC 与数据存储器、进位标志相减,结果放入数据存储器
SBC
A,x ACC 与立即数、进位标志相减,结果放入 ACC
DAA
[m]
将加法运算中放入 ACC 的值调整为十进制数,并将结果放入
1注
数据存储器
C
逻辑运算
AND
A,[m] ACC 与数据存储器做“与”运算,结果放入 ACC
1
Z
OR
A,[m] ACC 与数据存储器做“或”运算,结果放入 ACC
1
Z
XOR
A,[m] ACC 与数据存储器做“异或”运算,结果放入 ACC
1
Z
ANDM A,[m] ACC 与数据存储器做“与”运算,结果放入数据存储器
1
注
Z
ORM
1注
Z
1注
Z
A,[m] ACC 与数据存储器做“或”运算,结果放入数据存储器
XORM A,[m] ACC 与数据存储器做“异或”运算,结果放入数据存储器
AND
A,x ACC 与立即数做“与”运算,结果放入 ACC
1
Z
OR
A,x ACC 与立即数做“或”运算,结果放入 ACC
1
Z
1
Z
1注
Z
XOR
A,x ACC 与立即数做“异或”运算,结果放入 ACC
CPL
[m]
Rev. 1.10
对数据存储器取反,结果放入数据存储器
183
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
指令
周期
影响标志位
对数据存储器取反,结果放入 ACC
1
Z
递增数据存储器,结果放入 ACC
1
Z
助记符
CPLA [m]
说明
递增和递减
INCA
[m]
INC
[m]
DECA [m]
DEC
递增数据存储器,结果放入数据存储器
递减数据存储器,结果放入 ACC
1
注
1
[m]
递减数据存储器,结果放入数据存储器
RRA
[m]
数据存储器右移一位,结果放入 ACC
RR
[m]
1
Z
Z
注
Z
移位
RRCA [m]
数据存储器右移一位,结果放入数据存储器
带进位将数据存储器右移一位,结果放入 ACC
RRC
[m]
带进位将数据存储器右移一位,结果放入数据存储器
RLA
[m]
数据存储器左移一位,结果放入 ACC
RL
[m]
数据存储器左移一位,结果放入数据存储器
RLCA [m]
带进位将数据存储器左移一位,结果放入 ACC
RLC
带进位将数据存储器左移一位,结果放入数据存储器
[m]
1
1
无
注
1
1
无
C
注
C
1
无
1注
无
1
C
1注
C
数据传送
MOV
A,[m] 将数据存储器送至 ACC
1
无
MOV
[m],A 将 ACC 送至数据存储器
1注
无
MOV
A,x 将立即数送至 ACC
1
无
清除数据存储器的位
1注
无
置位数据存储器的位
1
无
位运算
CLR
[m].i
SET
[m].i
注
转移
JMP
addr 无条件跳转
2
无
SZ
[m]
如果数据存储器为零,则跳过下一条指令
1注
无
SZA
[m]
数据存储器送至 ACC,如果内容为零,则跳过下一条指令
1注
无
SNZ
[m]
如果数据存储器不为零,则跳过下一条指令
1
注
无
SZ
[m].i 如果数据存储器的第 i 位为零,则跳过下一条指令
1注
无
SNZ
[m].i 如果数据存储器的第 i 位不为零,则跳过下一条指令
1注
无
SIZ
[m]
递增数据存储器,如果结果为零,则跳过下一条指令
1
注
无
SDZ
[m]
递减数据存储器,如果结果为零,则跳过下一条指令
1注
无
SIZA
[m]
递增数据存储器,将结果放入 ACC,如果结果为零,则跳过
下一条指令
1注
无
SDZA
[m]
递减数据存储器,将结果放入 ACC,如果结果为零,则跳过
下一条指令
1注
无
CALL
addr 子程序调用
2
无
从子程序返回
2
无
从子程序返回,并将立即数放入 ACC
2
无
从中断返回
2
无
2注
无
TABRDL [m] 读取最后页的 ROM 内容,并送至数据存储器和 TBLH
2
注
无
读表指针 TBLP 自加,读取当前页的 ROM 内容,并送至数
ITABRD [m]
据存储器和 TBLH
2
注
无
RET
RET
x
A,
RETI
查表
TABRD [m]
Rev. 1.10
读取特定页的 ROM 内容,并送至数据存储器和 TBLH
184
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
助记符
说明
ITABRDL [m]
读表指针 TBLP 自加,读取最后页的 ROM 内容,并送至数
据存储器和 TBLH
指令
周期
影响标志位
2注
无
其它指令
NOP
1
无
CLR
[m] 清除数据存储器
1注
无
SET
[m] 置位数据存储器
1
CLR
WDT 清除看门狗定时器
空指令
SWAP
[m] 交换数据存储器的高低字节,结果放入数据存储器
SWAPA
[m] 交换数据存储器的高低字节,结果放入 ACC
HALT
进入暂停模式
注
无
1
TO,PDF
1注
无
1
无
1
TO,PDF
注:1. 对跳转指令而言,如果比较的结果牵涉到跳转即需 3 个周期,如果没有发生跳转,则只需一个周期。
2. 任何指令若要改变 PCL 的内容将需要 2 个周期来执行。
3. 对于“CLR WDT”指令而言,TO 和 PDF 标志位也许会受执行结果影响,“CLR WDT”被执行后,
TO 和 PDF 标志位会被清除,否则 TO 和 PDF 标志位保持不变。
Rev. 1.10
185
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
扩展指令集
扩展指令用来提供更大范围的数据存储器寻址。当被存取的数据存储器位于
Sector 0 之外的任何数据存储器 Sector,扩展指令可直接存取数据存储器而无需
使用间接寻址,此举也提高了 CPU 韧体性能。
助记符
说明
指令
周期
影响标志位
2
Z,C,AC,OV,
SC
2注
Z,C,AC,OV,
SC
2
Z,C,AC,OV,
SC
2注
Z,C,AC,OV,
SC
2
Z,C,AC,OV,
SC,CZ
2注
Z,C,AC,OV,
SC,CZ
2
Z,C,AC,OV,
SC,CZ
算术运算
LADD A,[m]
ACC 与数据存储器相加,结果放入 ACC
LADDM A,[m]
ACC 与数据存储器相加,结果放入数据存储器
LADC A,[m]
ACC 与数据存储器、进位标志相加,结果放入 ACC
LADCM A,[m]
ACC 与数据存储器、进位标志相加,结果放入数据存储器
LSUB
ACC 与数据存储器相减,结果放入 ACC
A,[m]
LSUBM A,[m]
ACC 与数据存储器相减,结果放入数据存储器
LSBC
ACC 与数据存储器、进位标志的反相减,结果放入 ACC
A,[m]
LSBCM A,[m]
ACC 与数据存储器、进位标志相减,结果放入数据存储器
2注
Z,C,AC,OV,
SC,CZ
LDAA
将加法运算中放入 ACC 的值调整为十进制数,并将结果
放入数据存储器
2注
C
[m]
逻辑运算
LAND A,[m]
ACC 与数据存储器做“与”运算,结果放入 ACC
2
Z
LOR
ACC 与数据存储器做“或”运算,结果放入 ACC
2
Z
LXOR A,[m]
ACC 与数据存储器做“异或”运算,结果放入 ACC
2
Z
LANDM A,[m]
LORM A,[m]
A,[m]
ACC 与数据存储器做“与”运算,结果放入数据存储器
2
注
Z
ACC 与数据存储器做“或”运算,结果放入数据存储器
2注
Z
LXORM A,[m]
ACC 与数据存储器做“异或”运算,结果放入数据存储器
2
注
Z
LCPL
对数据存储器取反,结果放入数据存储器
2注
Z
2
Z
[m]
LCPLA [m]
对数据存储器取反,结果放入 ACC
递增和递减
LINCA
[m]
递增数据存储器,结果放入 ACC
LINC
[m]
递增数据存储器,结果放入数据存储器
LDECA [m]
递减数据存储器,结果放入 ACC
LDEC
[m]
递减数据存储器,结果放入数据存储器
LRRA
[m]
数据存储器右移一位,结果放入 ACC
LRR
[m]
数据存储器右移一位,结果放入数据存储器
2
Z
2注
Z
2
Z
2注
Z
移位
LRRCA [m]
带进位将数据存储器右移一位,结果放入 ACC
LRRC
[m]
带进位将数据存储器右移一位,结果放入数据存储器
LRLA
[m]
数据存储器左移一位,结果放入 ACC
LRL
[m]
数据存储器左移一位,结果放入数据存储器
LRLCA [m]
Rev. 1.10
带进位将数据存储器左移一位,结果放入 ACC
186
2
无
2注
无
2
C
2注
C
2
无
2注
无
2
C
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
助记符
LRLC
说明
[m]
带进位将数据存储器左移一位,结果放入数据存储器
指令
周期
影响标志位
2注
C
2
无
数据传送
LMOV A,[m]
将数据存储器送至 ACC
LMOV [m],A
将 ACC 送至数据存储器
2
注
无
位运算
LCLR
[m].i
清除数据存储器的位
2注
无
LSET
[m].i
置位数据存储器的位
2注
无
转移
LSZ
[m]
如果数据存储器为零,则跳过下一条指令
2注
无
LSZA
[m]
数据存储器送至 ACC,如果内容为零,则跳过下一条指令
1注
无
LSNZ
[m]
如果数据存储器不为零,则跳过下一条指令
2注
无
LSZ
[m].i
如果数据存储器的第 i 位为零,则跳过下一条指令
2
注
无
LSNZ
[m].i
如果数据存储器的第 i 位不为零,则跳过下一条指令
2注
无
LSIZ
[m]
递增数据存储器,如果结果为零,则跳过下一条指令
2
注
无
LSDZ
[m]
递减数据存储器,如果结果为零,则跳过下一条指令
2注
无
LSIZA
[m]
递增数据存储器,将结果放入 ACC,如果结果为零,则跳
过下一条指令
2注
无
LSDZA
[m]
递减数据存储器,将结果放入 ACC,如果结果为零,则跳
过下一条指令
2注
无
LTABRD [m]
读取当前页的 ROM 内容,并送至数据存储器和 TBLH
3注
无
LTABRDL [m]
读取最后页的 ROM 内容,并送至数据存储器和 TBLH
3注
无
LITABRD [m]
读表指针 TBLP 自加,读取当前页的 ROM 内容,并送至
数据存储器和 TBLH
3注
无
LITABRDL [m]
读表指针 TBLP 自加,读取最后页的 ROM 内容,并送至
数据存储器和 TBLH
3注
无
清除数据存储器
2注
无
注
无
查表
其它指令
LCLR
[m]
LSET
[m]
置位数据存储器
2
LSWAP
[m]
交换数据存储器的高低字节,结果放入数据存储器
2注
无
LSWAPA
[m]
交换数据存储器的高低字节,结果放入 ACC
2
无
注:1. 对扩展跳转指令而言,如果比较的结果牵涉到跳转即需 4 个周期,如果没有发生跳转,则只需两
个周期。
2. 任何扩展指令若要改变 PCL 的内容将需要 3 个周期来执行。
Rev. 1.10
187
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
指令定义
ADC A,[m]
指令说明
功能表示
影响标志位
ADCM A,[m]
指令说明
功能表示
影响标志位
ADD A,[m]
指令说明
Add ACC to Data Memory with Carry
将指定的数据存储器、累加器内容和进位标志位相加,
结果存放到指定的数据存储器。
[m] ←ACC + [m] + C
OV、Z、AC、C、SC
功能表示
影响标志位
Add Data Memory to ACC
将指定的数据存储器和累加器内容相加,
结果存放到累加器。
ACC ← ACC + [m]
OV、Z、AC、C、SC
ADD A,x
指令说明
功能表示
影响标志位
Add immediate data to ACC
将累加器和立即数相加,结果存放到累加器。
ACC ← ACC + x
OV、Z、AC、C、SC
ADDM A,[m]
指令说明
Add ACC to Data Memory
将指定的数据存储器和累加器内容相加,
结果存放到指定的数据存储器。
[m] ←ACC + [m]
OV、Z、AC、C、SC
功能表示
影响标志位
AND A,[m]
指令说明
功能表示
影响标志位
Rev. 1.10
Add Data Memory to ACC with Carry
将指定的数据存储器、累加器内容以及进位标志相加,
结果存放到累加器。
ACC ← ACC + [m] + C
OV、Z、AC、C、SC
Logical AND Data Memory to ACC
将累加器中的数据和指定数据存储器内容做逻辑与,
结果存放到累加器。
ACC ← ACC“AND”[m]
Z
188
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
AND A,x
指令说明
功能表示
影响标志位
Logical AND immediate data to ACC
将累加器中的数据和立即数做逻辑与,结果存放到累加器。
ACC ← ACC“AND”x
Z
ANDM A,[m]
指令说明
Logical AND ACC to Data Memory
将指定数据存储器内容和累加器中的数据做逻辑与,
结果存放到数据存储器。
[m] ← ACC“AND”[m]
Z
功能表示
影响标志位
CALL addr
指令说明
影响标志位
Subroutine call
无条件地调用指定地址的子程序,此时程序计数器先加 1
获得下一个要执行的指令地址并压入堆栈,接着载入指定
地址并从新地址继续执行程序,由于此指令需要额外的运
算,所以为一个 2 周期的指令。
Stack ← Program Counter + 1
Program Counter ← addr
无
CLR [m]
指令说明
功能表示
影响标志位
Clear Data Memory
将指定数据存储器的内容清零。
[m] ← 00H
无
CLR [m].i
指令说明
功能表示
影响标志位
Clear bit of Data Memory
将指定数据存储器的 i 位内容清零。
[m].i ← 0
无
CLR WDT
指令说明
Clear Watchdog Timer
WDT 计数器、暂停标志位 PDF 和看门狗溢出标志位 TO
清零。
WDT cleared
TO & PDF ← 0
TO、PDF
功能表示
功能表示
影响标志位
Rev. 1.10
189
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
CPL [m]
指令说明
功能表示
影响标志位
CPLA [m]
指令说明
功能表示
影响标志位
DAA [m]
指令说明
Complement Data Memory with result in ACC
将指定数据存储器中的每一位取逻辑反,相当于从 1 变 0
或 0 变 1,而结果被储存回累加器且数据存储器中的内容
不变。
ACC←[m]
Z
影响标志位
Decimal-Adjust ACC for addition with result in Data Memory
将累加器中的内容转换为 BCD(二进制转成十进制)码。
如果低四位的值大于“9”或 AC=1,那么 BCD 调整就执
行对原值加“6”,否则原值保持不变;如果高四位的值大
于“9”或 C=1,那么 BCD 调整就执行对原值加“6”。
BCD 转换实质上是根据累加器和标志位执行 00H,06H,
60H 或 66H 的加法运算,结果存放到数据存储器。只有进
位标志位 C 受影响,用来指示原始 BCD 的和是否大于
100,并可以进行双精度十进制数的加法运算。
[m] ← ACC + 00H 或
[m] ← ACC + 06H 或
[m] ← ACC + 60H 或
[m] ← ACC + 66H
C
DEC [m]
指令说明
功能表示
影响标志位
Decrement Data Memory
将指定数据存储器内容减 1。
[m] ← [m] – 1
Z
DECA [m]
指令说明
Decrement Data Memory with result in ACC
将指定数据存储器的内容减 1,把结果存放回累加器
并保持指定数据存储器的内容不变。
ACC ← [m] – 1
Z
功能表示
功能表示
影响标志位
Rev. 1.10
Complement Data Memory
将指定数据存储器中的每一位取逻辑反,
相当于从 1 变 0 或 0 变 1。
[m] ← [m]
Z
190
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
HALT
指令说明
影响标志位
Enter power down mode
此指令终止程序执行并关掉系统时钟,RAM 和寄存器的内
容保持原状态,WDT 计数器和分频器被清“0”,暂停标
志位 PDF 被置位 1,WDT 溢出标志位 TO 被清 0。
TO ← 0
PDF ← 1
TO、PDF
INC [m]
指令说明
功能表示
影响标志位
Increment Data Memory
将指定数据存储器的内容加 1。
[m] ← [m] + 1
Z
INCA [m]
指令说明
Increment Data Memory with result in ACC
将指定数据存储器的内容加 1,结果存放回累加器并保持
指定的数据存储器内容不变。
ACC ← [m] + 1
Z
功能表示
功能表示
影响标志位
JMP addr
指令说明
Rev. 1.10
功能表示
影响标志位
Jump unconditionally
程序计数器的内容无条件地由被指定的地址取代,
程序由新的地址继续执行。当新的地址被加载时,
必须插入一个空指令周期,所以此指令为 2 个周期的指令。
Program Counter ← addr
无
MOV A,[m]
指令说明
功能表示
影响标志位
Move Data Memory to ACC
将指定数据存储器的内容复制到累加器。
ACC← [m]
无
MOV A,x
指令说明
功能表示
影响标志位
Move immediate data to ACC
将 8 位立即数载入累加器。
ACC ← x
无
191
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
MOV [m],A
指令说明
功能表示
影响标志位
Move ACC to Data Memory
将累加器的内容复制到指定的数据存储器。
[m] ← ACC
无
NOP
指令说明
功能表示
影响标志位
No operation
空操作,接下来顺序执行下一条指令。
PC ← PC+1
OR A,[m]
指令说明
功能表示
影响标志位
Logical OR Data Memory to ACC
将累加器中的数据和指定的数据存储器内容逻辑或,
结果存放到累加器。
ACC ← ACC“OR”[m]
Z
OR A,x
指令说明
功能表示
影响标志位
Logical OR immediate data to ACC
将累加器中的数据和立即数逻辑或,结果存放到累加器。
ACC ← ACC“OR”x
Z
ORM A,[m]
指令说明
Logical OR ACC to Data Memory
将存在指定数据存储器中的数据和累加器逻辑或,
结果放到数据存储器。
[m] ← ACC“OR”[m]
Z
功能表示
影响标志位
RET
指令说明
功能表示
影响标志位
RET A,x
指令说明
功能表示
影响标志位
Rev. 1.10
无
Return from subroutine
将堆栈寄存器中的程序计数器值恢复,
程序由取回的地址继续执行。
Program Counter←Stack
无
Return from subroutine and load immediate data to ACC
将堆栈寄存器中的程序计数器值恢复且累加器载入指定的
立即数,程序由取回的地址继续执行。
Program Counter ← Stack
ACC←x
无
192
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
RETI
指令说明
功能表示
影响标志位
无
RL [m]
指令说明
功能表示
Rotate Data Memory left
将指定数据存储器的内容左移 1 位,且第 7 位移到第 0 位。
[m].(i+1) ← [m].i (i=0~6)
[m].0 ← [m].7
无
影响标志位
RLA [m]
指令说明
功能表示
Rotate Data Memory left with result in ACC
将指定数据存储器的内容左移 1 位,且第 7 位移到第 0 位,
结果送到累加器,而指定数据存储器的内容保持不变。
ACC.(i+1) ← [m].i (i=0~6)
ACC.0 ←[m].7
影响标志位
无
RLC [m]
指令说明
Rotate Data Memory Left through Carry
将指定数据存储器的内容连同进位标志左移 1 位,
第 7 位取代进位标志且原本的进位标志移到第 0 位。
[m].(i+1) ← [m].i (i=0~6)
[m].0 ← C
C ← [m].7
C
功能表示
影响标志位
RLC A [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Return from interrupt
将堆栈寄存器中的程序计数器值恢复且中断功能通过设置
EMI 位重新使能。EMI 是控制中断使能的主控制位。如果
在执行 RETI 指令之前还有中断未被相应,则这个中断将
在返回主程序之前被相应。
Program Counter ←Stack
EMI ← 1
Rotate Data Memory left through Carry with result in ACC
将指定数据存储器的内容连同进位标志左移 1 位,第 7 位
取代进位标志且原本的进位标志移到第 0 位 , 移位结果送
回累加器,但是指定数据寄存器的内容保持不变。
ACC.(i+1) ← [m].i (i=0~6)
ACC.0 ← C
C ← [m].7
C
193
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
RR [m]
指令说明
功能表示
影响标志位
RRA [m]
指令说明
功能表示
影响标志位
RRC [m]
指令说明
功能表示
影响标志位
RRCA [m]
指令说明
功能表示
影响标志位
SBC A,[m]
指令说明
功能表示
影响标志位
Rev. 1.10
Rotate Data Memory right
将指定数据存储器的内容循环右移 1 位且第 0 位移到
第 7 位。
[m].i ← [m].(i+1) (i=0~6)
[m].7 ← [m].0
无
Rotate Data Memory right with result in ACC
将指定数据存储器的内容循环右移 1 位,第 0 位移到
第 7 位,移位结果存放到累加器,而指定数据存储器的内
容保持不变。
ACC.i ← [m].(i+1) (i=0~6)
ACC.7 ← [m].0
无
Rotate Data Memory right through Carry
将指定数据存储器的内容连同进位标志右移 1 位,
第 0 位取代进位标志且原本的进位标志移到第 7 位。
[m].i ← [m].(i+1) (i=0~6)
[m].7← C
C ← [m].0
C
Rotate Data Memory right through Carry with result in ACC
将指定数据存储器的内容连同进位标志右移 1 位,第 0 位
取代进位标志且原本的进位标志移到第 7 位 , 移位结果送
回累加器,但是指定数据寄存器的内容保持不变。
ACC.i ← [m].(i+1) (i=0~6)
ACC.7 ← C
C ← [m].0
C
Subtract Data Memory from ACC with Carry
将累加器减去指定数据存储器的内容以及进位标志的反,
结果存放到累加器。如果结果为负,C 标志位清除为 0,
反之结果为正或 0,C 标志位设置为 1。
ACC ← ACC – [m] – C
OV、Z、AC、C、SC、CZ
194
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SBC A,x
指令说明
功能表示
影响标志位
SBCM A,[m]
指令说明
功能表示
影响标志位
SDZ [m]
指令说明
功能表示
影响标志位
SDZA [m]
指令说明
Rev. 1.10
Subtract immediate data from ACC with Carry
将累加器减去立即数以及进位标志,结果存放到累加器。
如果结果为负,C 标志位清除为 0,反之结果为正或 0,
C 标志位设置为 1。
ACC ← ACC – [m] – C
OV、Z、AC、C、SC、CZ
Subtract Data Memory from ACC with Carry and result in Data
Memory
将累加器减去指定数据存储器的内容以及进位标志的反,
结果存放到数据存储器。如果结果为负,C 标志位清除为 0,
反之结果为正或 0,C 标志位设置为 1。
[m] ← ACC – [m] – C
OV、Z、AC、C、SC、CZ
Skip if Decrement Data Memory is 0
将指定的数据存储器的内容减 1,判断是否为 0,若为 0 则
跳过下一条指令,由于取得下一个指令时会要求插入一个
空指令周期,所以此指令为 2 个周期的指令。如果结果不
为 0,则程序继续执行下一条指令。
[m] ← [m] -1,如果 [m]=0 跳过下一条指令执行
无
Decrement data memory and place result in ACC,skip if 0
功能表示
影响标志位
将指定数据存储器内容减 1,判断是否为 0,如果为 0 则跳
过下一条指令,此结果将存放到累加器,但指定数据存储
器内容不变。由于取得下一个指令时会要求插入一个空指
令周期,所以此指令为 2 个周期的指令。如果结果不为 0,
则程序继续执行下一条指令。
ACC ← [m]-1,如果 ACC=0 跳过下一条指令执行
无
SET [m]
指令说明
功能表示
影响标志位
Set Data Memory
将指定数据存储器的每一位设置为 1。
[m] ← FFH
无
195
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SET [m].i
指令说明
功能表示
影响标志位
Set bit of Data Memory
将指定数据存储器的第 i 位置位为 1。
[m].i ← 1
无
SIZ [m]
指令说明
Skip if increment Data Memory is 0
将指定的数据存储器的内容加 1,判断是否为 0,若为 0 则
跳过下一条指令。由于取得下一个指令时会要求插入一个
空指令周期,所以此指令为 2 个周期的指令。如果结果不
为 0,则程序继续执行下一条指令。
[m] ←[m]+1,如果 [m]=0 跳过下一条指令执行
无
功能表示
影响标志位
SIZA [m]
指令说明
功能表示
影响标志位
SNZ [m].i
指令说明
功能表示
影响标志位
SNZ [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Skip if increment Data Memory is zero with result in ACC
将指定数据存储器的内容加 1,判断是否为 0,如果为 0 则
跳过下一条指令,此结果会被存放到累加器,但是指定数
据存储器的内容不变。由于取得下一个指令时会要求插入
一个空指令周期,所以此指令为 2 个周期的指令。如果结
果不为 0,则程序继续执行下一条指令。
ACC ←[m]+1,如果 ACC=0 跳过下一条指令执行
无
Skip if bit i of Data Memory is not 0
判断指定数据存储器的第 i 位,若不为 0,则程序跳过下一
条指令执行。由于取得下一个指令时会要求插入一个空指
令周期,所以此指令为 2 个周期的指令。如果结果为 0,
则程序继续执行下一条指令。
如果 [m].i≠0,跳过下一条指令执行
无
Skip if Data Memory is not 0
判断指定存储器,若不为 0,则程序跳过下一条指令执行。
由于取得下一个指令时会要求插入一个空指令周期,所以
此指令为 2 个周期的指令。如果结果为 0,则程序继续执
行下一条指令。
如果 [m]≠0,跳过下一条指令执行
无
196
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SUB A,[m]
指令说明
功能表示
影响标志位
SUBM A,[m]
指令说明
功能表示
影响标志位
SUB A,x
指令说明
Subtract Data Memory from ACC with result in Data Memory
将累加器的内容减去指定数据存储器的数据,结果存放到
指定的数据存储器。如果结果为负,C 标志位清除为 0,
反之结果为正或 0,C 标志位设置为 1。
[m] ← ACC – [m]
OV、Z、AC、C、SC、CZ
功能表示
影响标志位
Subtract immediate Data from ACC
将累加器的内容减去立即数,结果存放到累加器。如果结
果为负,C 标志位清除为 0,反之结果为正或 0,C 标志位
设置为 1。
ACC ← ACC – x
OV、Z、AC、C、SC、CZ
SWAP [m]
指令说明
功能表示
影响标志位
Swap nibbles of Data Memory
将指定数据存储器的低 4 位和高 4 位互相交换。
[m].3~[m].0 ↔ [m].7~[m].4
无
SWAPA [m]
指令说明
Swap nibbles of Data Memory with result in ACC
将指定数据存储器的低 4 位与高 4 位互相交换,再将结果
存放到累加器且指定数据寄存器的数据保持不变。
ACC.3~ACC.0 ← [m].7~[m].4
ACC.7~ACC.4 ← [m].3~[m].0
无
功能表示
影响标志位
SZ [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Subtract Data Memory from ACC
将累加器的内容减去指定的数据存储器的数据,把结果存
放到累加器。如果结果为负,C 标志位清除为 0,反之结果
为正或 0,C 标志位设置为 1。
ACC ← ACC – [m]
OV、Z、AC、C、SC、CZ
Skip if Data Memory is 0
判断指定数据存储器的内容是否为 0,若为 0,则程序跳过
下一条指令执行。由于取得下一个指令时会要求插入一个
空指令周期,所以此指令为 2 个周期的指令。如果结果不
为 0,则程序继续执行下一条指令。
如果 [m]=0, 跳过下一条指令执行
无
197
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
SZA [m]
指令说明
功能表示
影响标志位
SZ [m].i
指令说明
功能表示
影响标志位
TABRD [m]
指令说明
功能表示
影响标志位
TABRDL [m]
指令说明
功能表示
影响标志位
ITABRD [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Skip if Data Memory is 0 with data movement to ACC
将指定数据存储器内容复制到累加器,并判断指定数据存
储器的内容是否为 0,若为 0 则跳过下一条指令。由于取
得下一个指令时会要求插入一个空指令周期,所以此指令
为 2 个周期的指令。如果结果不为 0,则程序继续执行下
一条指令。
ACC ←[m],如果 [m]=0,跳过下一条指令执行
无
Skip if bit i of Data Memory is 0
判断指定数据存储器的第 i 位是否为 0,若为 0,则跳过下
一条指令。由于取得下一个指令时会要求插入一个空指令
周期,所以此指令为 2 个周期的指令。如果结果不为 0,
则程序继续执行下一条指令。
如果 [m].i=0,跳过下一条指令执行
无
Read table (specific page) to TBLH and Data Memory
将 表 格 指 针 对 TBHP 和 TBLP 所 指 的 程 序 代 码 低 字 节
( 指定页 ) 移至指定数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
Read table ( last page ) to TBLH and Data Memory
将表格指针 TBLP 所指的程序代码低字节 ( 最后一页 )
移至指定数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
Increment table pointer low byte first and read table to TBLH
and data memory
将自加表格指针 TBLP 所指的程序代码低字节(当前页)
移至指定的数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
198
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
ITABRDL [m]
指令说明
功能表示
影响标志位
XOR A,[m]
指令说明
功能表示
影响标志位
XORM A,[m]
指令说明
Rev. 1.10
Increment table pointer low byte first and read table(last page)
to TBLH and data memory
将自加表格指针 TBLP 所指的程序代码低字节(最后一页)
移至指定的数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
Logical XOR Data Memory to ACC
将累加器的数据和指定的数据存储器内容逻辑异或,
结果存放到累加器。
ACC ← ACC“XOR”[m]
Z
功能表示
影响标志位
Logical XOR ACC to Data Memory
将累加器的数据和指定的数据存储器内容逻辑异或,
结果放到数据存储器。
[m] ← ACC“XOR”[m]
Z
XOR A,x
指令说明
功能表示
影响标志位
Logical XOR immediate data to ACC
将累加器的数据与立即数逻辑异或,结果存放到累加器。
ACC ← ACC“XOR”x
Z
199
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
扩展指令定义
扩展指令被用来直接存取存储在任何数据存储器 Sector 中的数据。
LADC A,[m]
Add Data Memory to ACC with Carry
指令说明
将指定的数据存储器、累加器内容以及进位标志相加,
结果存放到累加器。
功能表示
ACC ← ACC + [m] + C
影响标志位
OV、Z、AC、C、SC
LADCM A,[m]
指令说明
功能表示
影响标志位
LADD A,[m]
指令说明
功能表示
影响标志位
LADDM A,[m]
指令说明
功能表示
影响标志位
LAND A,[m]
指令说明
功能表示
影响标志位
LANDM A,[m]
指令说明
功能表示
影响标志位
Rev. 1.10
Add ACC to Data Memory with Carry
将指定的数据存储器、累加器内容和进位标志位相加,
结果存放到指定的数据存储器。
[m] ←ACC + [m] + C
OV、Z、AC、C、SC
Add Data Memory to ACC
将将指定的数据存储器和累加器内容相加,
结果存放到累加器。
ACC ← ACC + [m]
OV、Z、AC、C、SC
Add ACC to Data Memory
将指定的数据存储器和累加器内容相加,
结果存放到指定的数据存储器。
[m] ←ACC + [m]
OV、Z、AC、C、SC
Logical AND Data Memory to ACC
将累加器中的数据和指定数据存储器内容做逻辑与,
结果存放到累加器。
ACC ← ACC“AND”[m]
Z
Logical AND ACC to Data Memory
将指定数据存储器内容和累加器中的数据做逻辑与,
结果存放到数据存储器。
[m] ← ACC“AND”[m]
Z
200
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LCLR [m]
指令说明
功能表示
影响标志位
Clear Data Memory
将指定数据存储器的内容清零。
[m] ← 00H
无
LCLR [m].i
指令说明
功能表示
影响标志位
Clear bit of Data Memory
指将指定数据存储器的 i 位内容清零。
[m].i ← 0
无
LCPL [m]
指令说明
Complement Data Memory
将指定数据存储器中的每一位取逻辑反,
相当于从 1 变 0 或 0 变 1。
[m] ← [m]
Z
功能表示
影响标志位
LCPLA [m]
指令说明
功能表示
影响标志位
LDAA [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Complement Data Memory with result in ACC
将指定数据存储器中的每一位取逻辑反,相当于从 1 变 0
或 0 变 1,结果被存放回累加器且数据寄存器的内容保持
不变。
ACC←[m]
Z
Decimal-Adjust ACC for addition with result in Data Memory
将累加器中的内容转换为 BCD(二进制转成十进制)码。
如果低四位的值大于“9”或 AC=1,那么 BCD 调整就执
行对低四位加“6”,否则低四位保持不变;如果高四位的
值大于“9”或 C=1,那么 BCD 调整就执行对高四位加“6”。
BCD 转换实质上是根据累加器和标志位执行 00H,06H,
60H 或 66H 的加法运算,结果存放到数据存储器。只有进
位标志位 C 受影响,用来指示原始 BCD 的和是否大于
100,并可以进行双精度十进制数的加法运算。
[m] ← ACC + 00H 或
[m] ← ACC + 06H 或
[m] ← ACC + 60H 或
[m] ← ACC + 66H
C
201
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LDEC [m]
指令说明
功能表示
影响标志位
Decrement Data Memory
将指定数据存储器的内容减 1。
[m] ← [m] – 1
Z
LDECA [m]
指令说明
功能表示
影响标志位
Decrement Data Memory with result in ACC
将指定数据存储器的内容减 1,把结果存放回累加器并保
持指定数据存储器的内容不变。
ACC ← [m] – 1
Z
LINC [m]
指令说明
功能表示
影响标志位
Increment Data Memory
将指定数据存储器的内容加 1。
[m] ← [m] + 1
Z
LINCA [m]
指令说明
功能表示
影响标志位
Increment Data Memory with result in ACC
将指定数据存储器的内容加 1,结果存放回累加器并保持
指定的数据存储器内容不变。
ACC ← [m] + 1
Z
LMOV A,[m]
指令说明
功能表示
影响标志位
Move Data Memory to ACC
将指定数据存储器的内容复制到累加器中。
ACC← [m]
无
LMOV [m],A
指令说明
功能表示
影响标志位
Move ACC to Data Memory
将累加器的内容复制到指定数据存储器。
[m] ← ACC
无
LOR A,[m]
指令说明
Logical OR Data Memory to ACC
将累加器中的数据和指定的数据存储器内容逻辑或,
结果存放到累加器。
ACC ← ACC“OR”[m]
Z
功能表示
影响标志位
Rev. 1.10
202
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LORM A,[m]
指令说明
功能表示
影响标志位
LRL [m]
指令说明
功能表示
影响标志位
LRLA [m]
指令说明
功能表示
Rotate Data Memory left
将指定数据存储器的内容左移 1 位,且第 7 位移到第 0 位。
[m].(i+1) ← [m].i (i=0~6)
[m].0 ← [m].7
无
Rotate Data Memory left with result in ACC
将指定数据存储器的内容左移 1 位,且第 7 位移到第 0 位,
结果送到累加器,而指定数据存储器的内容保持不变。
ACC.(i+1) ← [m].i (i=0~6)
ACC.0 ←[m].7
影响标志位
无
LRLC [m]
指令说明
Rotate Data Memory Left through Carry
将指定数据存储器的内容连同进位标志左移 1 位,
第 7 位取代进位标志且原本的进位标志移到第 0 位。
[m].(i+1) ← [m].i (i=0~6)
[m].0 ← C
C ← [m].7
C
功能表示
影响标志位
LRLC A [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Logical OR ACC to Data Memory
将存在指定数据存储器中的数据和累加器逻辑或,
结果放到数据存储器。
[m] ← ACC“OR”[m]
Z
Rotate Data Memory left through Carry with result in ACC
将指定数据存储器的内容连同进位标志左移 1 位,第 7 位
取代进位标志且原本的进位标志移到第 0 位 , 移位结果送
回累加器,但是指定数据寄存器的内容保持不变。
ACC.(i+1) ← [m].i (i=0~6)
ACC.0 ← C
C ← [m].7
C
203
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LRR [m]
指令说明
功能表示
影响标志位
LRRA [m]
指令说明
功能表示
影响标志位
LRRC [m]
指令说明
功能表示
影响标志位
LRRCA [m]
指令说明
功能表示
影响标志位
LSBC A,[m]
指令说明
功能表示
影响标志位
Rev. 1.10
Rotate Data Memory right
将指定数据存储器的内容循环右移 1 位且第 0 位移到
第 7 位。
[m].i ← [m].(i+1) (i=0~6)
[m].7 ← [m].0
无
Rotate Data Memory right with result in ACC
将指定数据存储器的内容循环右移 1 位,第 0 位移到
第 7 位,移位结果存放到累加器,而指定数据存储器的内
容保持不变。
ACC.i ← [m].(i+1) (i=0~6)
ACC.7 ← [m].0
无
Rotate Data Memory right through Carry
将指定数据存储器的内容连同进位标志右移 1 位,
第 0 位取代进位标志且原本的进位标志移到第 7 位。
[m].i ← [m].(i+1) (i=0~6)
[m].7← C
C ← [m].0
C
Rotate Data Memory right through Carry with result in ACC
将指定数据存储器的内容连同进位标志右移 1 位,第 0 位
取代进位标志且原本的进位标志移到第 7 位 , 移位结果送
回累加器,但是指定数据寄存器的内容保持不变。
ACC.i ← [m].(i+1) (i=0~6)
ACC.7 ← C
C ← [m].0
C
Subtract Data Memory from ACC with Carry
将累加器减去指定数据存储器的内容以及进位标志的反,
结果存放到累加器。如果结果为负,C 标志位清除为 0,
反之结果为正或 0,C 标志位设置为 1。
ACC ← ACC – [m] – C
OV、Z、AC、C、SC、CZ
204
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LSBCM A,[m]
指令说明
功能表示
影响标志位
LSDZ [m]
指令说明
功能表示
影响标志位
LSDZA [m]
指令说明
Rev. 1.10
Subtract Data Memory from ACC with Carry and result in Data
Memory
将累加器减去指定数据存储器的内容以及进位标志的反,
结果存放到数据存储器。如果结果为负,C 标志位清除为 0,
反之结果为正或 0,C 标志位设置为 1。
[m] ← ACC – [m] – C
OV、Z、AC、C、SC、CZ
Skip if Decrement Data Memory is 0
将指定的数据存储器的内容减 1,判断是否为 0,若为 0 则
跳过下一条指令,由于取得下一个指令时会要求插入一个
空指令周期,所以此指令为 2 个周期的指令。如果结果不
为 0,则程序继续执行下一条指令。
[m] ← [m] -1,如果 [m]=0 跳过下一条指令执行
无
功能表示
影响标志位
Skip if decrement Data Memory is zero with result in ACC
将指定数据存储器内容减 1,判断是否为 0,如果为 0 则跳
过下一条指令,此结果将存放到累加器,但指定数据存储
器内容不变。由于取得下一个指令时会要求插入一个空指
令周期,所以此指令为 2 个周期的指令。如果结果不为 0,
则程序继续执行下一条指令。
ACC ← [m]-1,如果 ACC=0 跳过下一条指令执行
无
LSET [m]
指令说明
功能表示
影响标志位
Set Data Memory
将指定数据存储器的每一个位置位为 1。
[m] ← FFH
无
LSET [m].i
指令说明
功能表示
影响标志位
Set bit of Data Memory
将指定数据存储器的第 i 位置位为 1。
[m].i ← 1
无
205
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LSIZ [m]
指令说明
功能表示
影响标志位
LSIZA [m]
指令说明
功能表示
影响标志位
Skip if increment Data Memory is zero with result in ACC
将指定数据存储器的内容加 1,判断是否为 0,如果为 0 则
跳过下一条指令,此结果会被存放到累加器,但是指定数
据存储器的内容不变。由于取得下一个指令时会要求插入
一个空指令周期,所以此指令为 2 个周期的指令。如果结
果不为 0,则程序继续执行下一条指令。
ACC ←[m]+1,如果 ACC=0 跳过下一条指令执行
无
LSNZ [m].i
指令说明
功能表示
影响标志位
Skip if bit i of Data Memory is not 0
判断指定数据存储器的第 i 位,若不为 0,则程序跳过下
一条指令执行。由于取得下一个指令时会要求插入一个空
指令周期,所以此指令为 2 个周期的指令。如果结果为 0,
则程序继续执行下一条指令。
如果 [m].i≠0,跳过下一条指令执行
LSNZ [m]
指令说明
功能表示
影响标志位
Skip if Data Memory is not 0
LSUB A,[m]
指令说明
Subtract Data Memory from ACC
将累加器的内容减去指定的数据存储器的数据,把结果存
放到累加器。如果结果为负,C 标志位清除为 0,反之结果
为正或 0,C 标志位设置为 1。
ACC ← ACC – [m]
OV、Z、AC、C、SC、CZ
功能表示
影响标志位
Rev. 1.10
Skip if increment Data Memory is 0
将指定的数据存储器的内容加 1,判断是否为 0,若为 0 则
跳过下一条指令。由于取得下一个指令时会要求插入一个
空指令周期,所以此指令为 2 个周期的指令。如果结果不
为 0,则程序继续执行下一条指令。
[m] ←[m]+1,如果 [m]=0 跳过下一条指令执行
无
无
判断指定数据存储器,若不为 0,则程序跳过下一条指令
执行。由于取得下一个指令时会要求插入一个空指令周期,
所以此指令为 2 个周期的指令。如果结果为 0,则程序继
续执行下一条指令。
如果 [m]≠0,跳过下一条指令执行
无
206
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LSUBM A,[m]
指令说明
功能表示
影响标志位
Subtract Data Memory from ACC with result in Data Memory
将累加器的内容减去指定数据存储器的数据,结果存放到
指定的数据存储器。如果结果为负,C 标志位清除为 0,
反之结果为正或 0,C 标志位设置为 1。
[m] ← ACC – [m]
OV、Z、AC、C、SC、CZ
LSWAP [m]
指令说明
功能表示
影响标志位
Swap nibbles of Data Memory
将指定数据存储器的低 4 位和高 4 位互相交换。
[m].3~[m].0 ↔ [m].7~[m].4
无
LSWAPA [m]
指令说明
Swap nibbles of Data Memory with result in ACC
将指定数据存储器的低 4 位和高 4 位互相交换,再将结果
存放到累加器且指定数据寄存器的数据保持不变。
ACC.3~ACC.0 ← [m].7~[m].4
ACC.7~ACC.4 ← [m].3~[m].0
无
功能表示
影响标志位
LSZ [m]
指令说明
功能表示
影响标志位
LSZA [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Skip if Data Memory is 0
判断指定数据存储器的内容是否为 0,若为 0,则程序跳过
下一条指令执行。由于取得下一个指令时会要求插入一个
空指令周期,所以此指令为 2 个周期的指令。如果结果不
为 0,则程序继续执行下一条指令。
如果 [m]=0, 跳过下一条指令执行
无
Skip if Data Memory is 0 with data movement to ACC
将指定数据存储器内容复制到累加器,并判断指定数据存
储器的内容是否为 0,若为 0 则跳过下一条指令。由于取
得下一个指令时会要求插入一个空指令周期,所以此指令
为 2 个周期的指令。如果结果不为 0,则程序继续执行下
一条指令。
ACC ← [m],如果 [m]=0,跳过下一条指令执行
无
207
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LSZ [m].i
指令说明
功能表示
影响标志位
LTABRD [m]
指令说明
功能表示
影响标志位
LTABRDL [m]
指令说明
功能表示
影响标志位
LITABRD [m]
指令说明
功能表示
影响标志位
LITABRDL [m]
指令说明
功能表示
影响标志位
Rev. 1.10
Skip if bit i of Data Memory is 0
判断指定数据存储器的第 i 位是否为 0,若为 0,则跳过下
一条指令。由于取得下一个指令时会要求插入一个空指令
周期,所以此指令为 2 个周期的指令。如果结果不为 0,
则程序继续执行下一条指令。
如果 [m].i=0,跳过下一条指令执行
无
Move the ROM code to TBLH and data memory
将表格指针 TBLP 所指的程序代码低字节(当前页)
移至指定数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
Read table ( last page ) to TBLH and Data Memory
将表格指针 TBLP 所指的程序代码低字节 ( 最后一页 )
移至指定数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
Increment table pointer low byte first and read table to TBLH
and data memory
将自加表格指针 TBHP 和 TBLP 所指的程序代码低字节移
至指定的数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
Increment table pointer low byte first and read table(last page)
to TBLH and data memory
将自加表格指针 TBLP 所指的程序代码低字节(最后一页)
移至指定的数据存储器且将高字节移至 TBLH。
[m] ← 程序代码 ( 低字节 )
TBLH ← 程序代码 ( 高字节 )
无
208
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
LXOR A,[m]
指令说明
功能表示
影响标志位
LXORM A,[m]
指令说明
功能表示
影响标志位
Rev. 1.10
Logical XOR Data Memory to ACC
将累加器的数据和指定的数据存储器内容逻辑异或,
结果存放到累加器。
ACC ← ACC“XOR”[m]
Z
Logical XOR ACC to Data Memory
将累加器的数据和指定的数据存储器内容逻辑异或,
结果放到数据存储器。
[m] ← ACC“XOR”[m]
Z
209
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
封装信息
请注意,这里提供的封装信息仅作为参考。由于这个信息经常更新,提醒用户
咨询 Holtek 网站以获取最新版本的封装信息。
封裝信息的相关内容如下所示,点击可链接至 Holtek 网站相关信息页面。
● 封装信息(包括外形尺寸、包装带和卷轴规格)
● 封装材料信息
● 纸箱信息
Rev. 1.10
210
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
48-pin LQFP (7mm × 7mm) 外形尺寸
�
�
�
� �
�
� �
�
� �
�
� �
�
�
�
� �
� �
�
�
�
符号
A
B
C
D
E
F
G
H
I
J
K
α
符号
A
B
C
D
E
F
G
H
I
J
K
α
Rev. 1.10
� �
最小
—
—
—
—
—
0.007
0.053
—
0.002
0.018
0.004
0°
尺寸 ( 单位:inch)
正常
0.354 BSC
0.276 BSC
0.354 BSC
0.276 BSC
0.020 BSC
0.009
0.055
—
—
0.024
—
―
最大
—
—
—
—
—
0.011
0.057
0.063
0.006
0.030
0.008
7°
最小
—
—
—
—
—
0.170
1.350
—
0.050
0.450
0.090
0°
尺寸 ( 单位:mm)
正常
9.000 BSC
7.000 BSC
9.000 BSC
7.000 BSC
0.500 BSC
0.220
1.400
—
—
0.600
—
―
最大
—
—
—
—
—
0.270
1.450
1.600
0.150
0.750
0.200
7°
211
2016-12-07
�HT66F3197
内置 EEPROM 和 UART 的增强 A/D 型单片机
Copyright© 2016 by HOLTEK SEMICONDUCTOR INC.
使用指南中所出现的信息在出版当时相信是正确的,然而盛群对于说明书的使用不负任何责任。文中提到
的应用目的仅仅是用来做说明,盛群不保证或表示这些没有进一步修改的应用将是适当的,也不推荐它的
产品使用在会由于故障或其它原因可能会对人身造成危害的地方。盛群产品不授权使用于救生、维生从机
或系统中做为关键从机。盛群拥有不事先通知而修改产品的权利,对于最新的信息,请参考我们的网址
http://www.holtek.com/zh/.
Rev. 1.10
212
2016-12-07
�