B-G431B-ESC1
Data brief
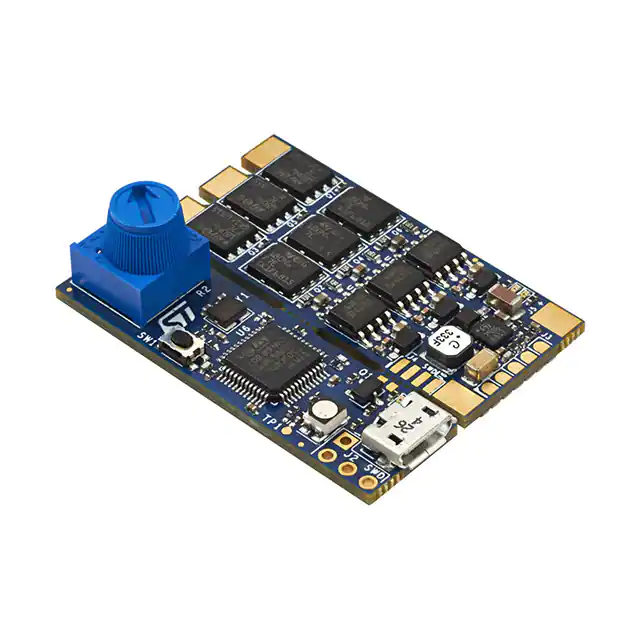
Electronic speed controller Discovery kit for drones with STM32G431CB
Features
•
•
•
•
•
•
•
•
•
•
Picture is not contractual.
Product status link
B-G431B-ESC1
•
•
•
•
•
•
•
•
•
•
Full reference design for electronic speed controller capable of both sensorless
FOC and 6-step algorithm
Designed for drones with up to 6S LiPo battery pack or equivalent suitable DC
supply
3-phase driver board for BLDC/PMSM motors with discrete N-channel 60 V,
120 A STripFET F7 power MOSFETs
STM32G431CB Arm® Cortex®-M4 32-bit MCU, 213 DMIPS, 128 Kbytes of
Flash memory, 32 Kbytes of SRAM, analog rich, math accelerator
On-board ST-LINK/V2-1 debugger/programmer detachable from the main board
Output peak motor current (maximum peak current tested with propeller to have
an air-forced cooling): 40 A
Designed with SMD ceramic capacitors with very low profile
BEC available through the daughterboard (5 V for external board supply, for
example a flight control board)
Support for motor sensors (Hall or encoder)
Supported by ST Motor Control Software Development Kit (SDK) with ST Motor
profiler
3-shunt mode supported for motor current sensing
L6387 High voltage high and low-side driver with integrated interlocking function
Overcurrent and overvoltage protection feature (OCP/OVP)
Thermal measuring and overheating protection with NTC on board
ESC ready for communication with any standard flight control unit (FCU):
PWM/CAN/UART
Potentiometer and user button available on daughterboard
Two user LEDs: one green LED for 3.3 V level, and one red LED configurable by
the user
Target applications: motor driving for R/C vehicles, UAV drone, electric car or
boat
PCB type and size:
–
FR-4 PCB material
–
8-layer layout
–
Dimensions (including the daughterboard with ST-LINK part):
30 mm × 41 mm
–
Weight (including the daughterboard with ST-LINK part): 9.2 g
RoHS compliant
Description
The B-G431B-ESC1 Discovery kit is based on the STM32G431CB microcontroller,
the L6387 driver and STL180N6F7 power MOSFETs. It is composed of a main power
board, and a daughterboard with embedded ST-LINK/V2-1. It is an electronic speed
controller (ESC), designed to drive a single 3-phase brushless motor (BLDC/PMSM),
performing both sensorless FOC algorithm and 6-step control with a speed
regulation, and an active braking function algorithm. The ST sensorless FOC
algorithm ensures longer flight times and an optimal dynamic performance. This unit
accepts command signal from an external unit for driving and monitoring, for instance
DB3787 - Rev 1 - April 2019
For further information contact your local STMicroelectronics sales office.
www.st.com
�B-G431B-ESC1
a flight control board or equivalent. For this purpose, several communication bus
interfaces (UART, CAN, PWM channel) are present. A potentiometer and a user
button are available for user application. The daughterboard includes a 5 V battery
eliminator circuit (BEC), and the main board embeds an overcurrent/overvoltage and
thermal protection circuit. The form factor makes it suitable for small and very light
R/C vehicles (FPV race drone) and the motor current capability fits the power
requirement of big vehicles, for instance a prosumer drone.
DB3787 - Rev 1
page 2/6
�B-G431B-ESC1
Ordering information
1
Ordering information
To order the B-G431B-ESC1 Discovery kit, refer to Table 1. For a detailed description of the board, refer to its
user manual on the product web page. Additional information is available from the datasheet and reference
manual of the target STM32.
Table 1. List of available products
1.1
Order code
Board reference
User manual
Target STM32
B-G431B-ESC1
MB1419
UM2516
STM32G431CBU6
Product marking
Evaluation tools marked as “ES” or “E” are not yet qualified and therefore not ready to be used as reference
design or in production. Any consequences deriving from such usage will not be at ST charge. In no event, ST will
be liable for any customer usage of these engineering sample tools as reference design or in production.
“E” or “ES” marking examples of location:
•
On the targeted STM32 that is soldered on the board (for illustration of STM32 marking, refer to the STM32
datasheet “Package information” paragraph at the www.st.com website).
•
Next to the evaluation tool ordering part number that is stuck or silk-screen printed on the board.
1.2
Codification
The meaning of the codification of the Discovery kit is explained in Table 2.
Table 2. Codification explanation
B-XXYYZ-ESCN
Description
Example: B-G431B-ESC1
XX
MCU series in STM32 32-bit Arm Cortex MCUs
STM32G4 Series
YY
MCU product line in the series
STM32G431
Z
ESCN
STM32 Flash memory size:
•
B for 128 Kbytes
Electronic speed controller version number
128 Kbytes
ESC1
The order code is mentioned on a sticker placed on the top side of the board.
DB3787 - Rev 1
page 3/6
�B-G431B-ESC1
Development environment
2
Development environment
The B-G431B-ESC1 runs with the STM32G431CB 32-bit microcontroller based on the Arm® Cortex®-M4 core.
Note:
Arm is a registered trademark of Arm Limited (or its subsidiaries) in the US and/or elsewhere.
2.1
System requirements
•
•
Windows® OS (7, 8 and 10), Linux® 64-bit, or macOS®
USB Type-A to Micro-B cable
Note:
macOS® is a trademark of Apple Inc. registered in the U.S. and other countries.
2.2
Development toolchains
Note:
DB3787 - Rev 1
•
Keil® MDK-ARM (see note)
•
•
IAR™ EWARM (see note)
GCC-based IDEs
On Windows® only.
page 4/6
�B-G431B-ESC1
Revision history
Table 3. Document revision history
DB3787 - Rev 1
Date
Version
5-Apr-2019
1
Changes
Initial release.
page 5/6
�B-G431B-ESC1
IMPORTANT NOTICE – PLEASE READ CAREFULLY
STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, enhancements, modifications, and improvements to ST
products and/or to this document at any time without notice. Purchasers should obtain the latest relevant information on ST products before placing orders. ST
products are sold pursuant to ST’s terms and conditions of sale in place at the time of order acknowledgement.
Purchasers are solely responsible for the choice, selection, and use of ST products and ST assumes no liability for application assistance or the design of
Purchasers’ products.
No license, express or implied, to any intellectual property right is granted by ST herein.
Resale of ST products with provisions different from the information set forth herein shall void any warranty granted by ST for such product.
ST and the ST logo are trademarks of ST. For additional information about ST trademarks, please refer to www.st.com/trademarks. All other product or service
names are the property of their respective owners.
Information in this document supersedes and replaces information previously supplied in any prior versions of this document.
© 2019 STMicroelectronics – All rights reserved
DB3787 - Rev 1
page 6/6
�
很抱歉,暂时无法提供与“B-G431B-ESC1”相匹配的价格&库存,您可以联系我们找货
免费人工找货