Erste Schritte mit dem Schrittmotormodul
Kursive und grüne Zeilen können beim PD-013 ignoriert werden.
Komponenten:
• • • • • • • Ihr TMCM-013 Schrittmotor Steuer- und Treibermodul. Ein Schrittmotor mit 1A RMS Spulenstrom. RS232 oder USB zu RS 485 Konverter mit passenden Anschlusskabeln. Schritt/Richtung Generator (+5V / 0V) Spannungsversorgung für 12V bis 24V Hyperterminal Programm, PC Werkzeug zum Anschließen des Motors und des TMCM-013. • • • • •
Vorsicht:
Der Motor darf niemals abgezogen bzw. angeschlossen werden, während das Modul bestromt ist. Verwechseln von Anschlüssen oder Kurzschlüsse können zur Zerstörung des Moduls führen. Bündeln Sie keine Signalkabel mit den Motor- und Spannungsversorgungskabeln zur Vermeidung von Kommunikationsfehlern. Überschreiten Sie nicht die max. Spannung von 30V. Wenn Sie das TMCM-013 auf einen Motor montieren, lassen Sie 5mm Abstand zur Luftkühlung.
1. 2.
3.
4. 5. 6. 7.
8.
9.
Beginnen Sie mit ausgeschalteter Versorgungsspannung. Anschließen des RS485 Konverters an den PC mit RS232. Verbinden Sie das TMCM-013 mit dem RS485 Konverter. • RS485 GND an Pin 14 (empfohlen) • RS485 + an Pin 15 • RS485 – an Pin 16 Anschluss der Versorgungsspannung an das TMCM-013: • Versorgungsspannung (+) an Pin 1 • Masse (GND) an Pin 2 Anschluss des Schrittmotors an die 4-pin-Buchse. Versorgung EINschalten. Der Motor ist bestromt aber im Stillstand. Wenn dieses nicht so ist, schalten Sie die Versorgung AUS und überprüfen Ihre Anschlüsse. Starten Sie das HyperTerminal Programm (siehe zweite Seite für Details). Senden Sie zuerst folgende Befehle: • AA400 -- Beschleunigung • AV50000 -- konstante Drehung • AV0 -- Motor stoppt Für Schritt- / Richtungssteuerung verbinden Sie • +5V Spannung (z.B. von Pin 12) an Pin 3 (VCOM). Diese Spannung definiert den High-Pegel der Schritt/Richtungs Signale (hier z.B. +5V). • Schrittsignal an Pin 6 (0V / 5V Signal analog zu VCOM). • Richtungssignal an Pin 5 (0V / 5V Signal) • Masse (z.B. Pin 10) an GND des Generators. Für Schritt-/Richtungssteuerung muss die Beschleunigung 0 (Standard) betragen. → AA0 . Starten Sie das Schrittsignal (max. 5V, 250kHz). Der Motor dreht. Variieren Sie Frequenz- und Richtungssignal.
Start:
Schritt- / Richtungsgenerator
Dir
GND Rotationsrichtung +5V 0V +5V 0V Abbremsen
Step
GND
GND
Geschw. konstant
RS232 zu RS485 +-
1
6
2
Pin 16
RS485 RS485+ GND +5V GND
TMCM-013
8
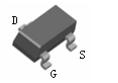
STEP DIR VCOM GND VS
Pin 1
OA1 OA2 OB1
3 + 4 Motor 9 7
Erste Schritte sind getan. Weitere Befehle finden Sie
auf Seite 2. Für Erkundung der vollen Funktionalität des TMCM-013 nutzen Sie bitte das TMCM-013 Manual. Anschlusskabel: Das TMCM-013 wird mit einem 16 Pin und 4 Pin (Serie B4B-PH-SM3-TB PH-connectors) mit etwa 20cm Kabeln für jeden Pin geliefert. Bei einem PANdrive PD-013 ist der Motor bereits an das TMCM-013 angeschlossen.
Spannungsversorgung 12..24V
Copyright © 2006, TRINAMIC Motion Control GmbH & Co. KG
www.trinamic.com
OB2
�HyperTerminal:
1.
Vergewissern Sie sich, dass kein anderes Programm den COM-Port nutzt.
2.
Öffnen Sie HyperTerminal. Typischer Pfad (Windows2000): Start/Programme/Zubehör/Kommunikation/HyperTerminal
3.
Neue Verbindung, Name und Icon wählen. OK klicken.
4.
Com-Port wählen (RS232 ist meist COM1). OK klicken.
5.
Einstellungen wie oben vornehmen und. OK klicken.
9.
Einstellungen abspeichern. Jetzt können Sie Befehle senden.
6.
Eigenschaften öffnen im HyperTerminalProgramm.
7.
ASCII-Konfiguration im Einstellungs-Tab öffnen. OK klicken.
8.
Einstellungen wie oben und zweimal OK klicken.
Knöpfe zum Öffnen und Schließen der Verbindung:
Bei RS485-Befehlen kommt das Adressbyte (Standard ist “A”) zuerst, dann erst der Befehl. Ein kleiner Befehlsbuchstabe liefert die aktuelle Einstellung. Befehl Funktion Bereich Standard A, a Beschleunigung 0..2500000 0 Setzt den C, c 0..100 50 Motorstrom G, g StallGuard -7..0..+7 0 M, m Modusauswahl 0, 1, 2, 3, 4 0 P Setzt Position 32 bit 0 Liefert aktuelle R 32 bit Position Geschwindigkeit +/-2500000 V, v 0 der Rotation 0 or 1 Speichert W aktuelle Einstellungen Liefert X Versionsnummer Y, y Standby-Strom 0..100 20 MikroschrittZ, z 0..6 0 auflösung Weitere Befehle und Erklärungen liefert das TMCM013 Manual auf TechLibCD oder www.trinamic.com.
RS485 Befehle:
Fehlersuche:
• • • • •
Der eingetippte Befehl wird nicht ausgegeben: Leuchtet die LED des TMCM-013? Wenn nicht, prüfen Sie die Spannungsversorgung. Benutzen Sie den richtigen COM-Port und ist er nicht blockiert durch ein anderes Programm? Tauschen Sie die RS485 + und – Anschlüsse. Überprüfen Sie die ASCII-Einstellungen. Benutzen Sie alternativ zu HyperTerminal die Monopack LT Software von www.trinamic.com, “discontinued products” oder eine andere Terminal Software.
Der Motor reagiert nicht: • Wenn er nach dem Einschalten bestromt wird (Spannung korrekt?), ist es normalerweise ein Kommunikationsproblem (siehe oben). • Überprüfen Sie die Beschleunigungs- und Stromeinstellung. Sie müssen von Null verschieden sein. Der Strom sollte hier mindestens 50% sein. • Stellen Sie die Standardeinstellungen wieder her. Lesen Sie hierzu das TMCM-013 Manual. • Führen Sie mit dem Befehl AE eine Fehleranalyse durch. Bitte sehen Sie in das TMCM-013 Manual für Details der Fehleranalyse und weitere Informationen. www.trinamic.com
Copyright © 2006, TRINAMIC Motion Control GmbH & Co. KG
�
很抱歉,暂时无法提供与“PD-013”相匹配的价格&库存,您可以联系我们找货
免费人工找货- 国内价格
- 5+0.49824
- 20+0.45153
- 100+0.40482
- 500+0.35811
- 1000+0.33631
- 2000+0.32074
- 国内价格
- 50+0.03865
- 200+0.03624
- 600+0.03382
- 2000+0.03141
- 5000+0.02899
- 10000+0.0273
- 国内价格
- 50+0.06584
- 600+0.05217
- 1200+0.05139
- 3000+0.04059
- 国内价格
- 20+0.08497
- 200+0.06821
- 国内价格
- 1+2.7734
- 10+2.156
- 25+1.8914
- 100+1.5582
- 国内价格
- 1+2.43099
- 30+2.34599
- 100+2.17599
- 500+2.00599
- 1000+1.92099
- 国内价格
- 5+1.15339
- 50+1.01335
- 150+0.95333
- 国内价格
- 5+0.24549
- 20+0.22344
- 100+0.20139
- 500+0.17934
- 1000+0.16905
- 2000+0.1617