PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
1. 单片机特点
1.1. 系统特性
高抗干扰(High EFT)系列
特别适用于 AC 电源供电的、阻容降压电路的、需要较强抗干扰能力的,
或有高 EFT 安规测试要求(±4KV)的产品
工作温度范围:-40°C ~ 85°C
ESD > 8 KV
产品不良率保证低于 500 PPM。
CR
MI
JS
产品寿命保证在 5 年以上(焊接温度≤260℃)。
1.2. 系统功能
2KW MTP 程序空间(可编程 1000 次)
128 Bytes 数据空间
一个硬件 16 位定时器
O
最大 7 IO 引脚可选择为触摸按键
一个硬件比较器
c
mi
Se
两个 8 位定时器可产生 6/7/8-bit PWM 波形
最大 8 IO 引脚带可选择的上拉/下拉电阻
每个 IO 引脚都可设定为唤醒功能
Bandgap 电路提供 1.20V 参考电压
c
du
on
时钟源:IHRC、ILRC 和 EOSC (XTAL)
8 级可选择的 LVR(Low Voltage Reset)复位电压从 1.8V 到 4.5V
16 级可选择的 LVD (Low Voltage Detect)检测电压从 1.8V 到 4.5V
三个可选择的外部中断引脚
r
to
1.3. CPU 特点
8 位高性能精简指令集 CPU
86 条高效的指令
绝大部分指令都是单周期(1T)指令
可程序设定的堆栈指针和堆栈深度
数据存取支持直接和间接寻址模式
用数据存储器即可当作间接寻址模式的数据指针(index pointer)
寄存器地址空间、数据存储空间、MTP 程序空间三者互相独立
1.4. 封装信息
PFC161-U06: SOT23-6 (60mil)
PFC161-2N08: DFN (2*2mm)
PFC161-S08A: SOP8A (150mil)
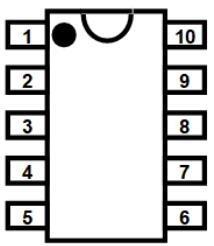
PFC161-EY10: ESSOP10 (150mil)
PFC161-S08B: SOP8B (150mil)
www.jsmsemi.com
第1/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
2. 系统概述和方框图
PFC161 是一个 IO 类型,静态 MTP 单片机。它运用 RISC 的架构基础使大部分指令的执行周期都是单周期,
只有少部分间接寻址的指令需要两个指令周期。
PFC161 内置 2KW MTP 程序存储器以及 128 字节数据存储器。
PFC161 内置最多 7 个按键触摸控制器以及一个硬件比较器。
PFC161 提供一个 16 位的硬件计数器(Timer16)、两个带 PWM 的 8 位计数器(Timer2、Timer3)。
O
CR
MI
JS
c
du
on
c
mi
Se
r
to
www.jsmsemi.com
第2/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
3. 引脚分配及功能说明
PA4
GND/AGND
PA3
PA3
GND/AGND
PA5
VDD/AVDD
CR
MI
JS
PA5
PA4
PA6/PA7
PB0
PA6/PA7
PB7
VDD/AVDD
PFC161-U06 (SOT23-6 60mil)
VDD/AVDD
PA5
GND/AGND
PA5
PA4
PA0
PA7
PA3
PA4
VDD/AVDD
PB0
PA3
GND/AGND
PA6
PFC161-S08A(SOP8A-150mil)
PB7
PB0
GND/AGND
PA7
PA0
PA6
PA4
PA5
PA3
r
to
VDD/AVDD
PFC161-S08B(SOP8B-150mil)
c
du
on
c
mi
Se
PA6
O
PA7
PFC161-2N08 (DFN-2*2mm)
PFC161-EY10 (ESSOP10-150mil)
注意:PFC161-U06/2N08 封装的芯片,其 PA6/PA7 两 IO 共用同一 pin 脚,故使用时不可以 PA6/PA7 同时
输出 0/1 信号,否则将会造成 pin 脚短路。
www.jsmsemi.com
第3/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
输入/输出
引脚
名称
特殊功能
I / O 上拉 下拉 唤醒 晶振
比较器
PWM
触摸
√
√
√
√
CO
TM2PWM
TK7
PA3
√
√
√
√
CIN-
TM2PWM
TK5
PA4
√
√
√
√
TM3PWM
TK6
TM3PWM
TK9
PA5
PA6
PA7
PB7
CIN+
CIN-
√
√
√
√
√
√
√
√
√
TK8
√
√
√
√
√
TK10
√
√
√
√
√
√
√
O
PB0
CR
MI
JS
PA0
√
CIN-
TM2PWM
TK11
TM3PWM
TK4
CS 电容
外部
中断
外部
烧录
复位
INT0
√
INT0A
GND / AGND
√
√
√
INT1
√
c
mi
Se
VDD / AVDD
√
√
√
1. 所有 I/O 引脚都具有:施密特触发器输入;CMOS 电压基准位。
c
du
on
2. 当某引脚作为 PWM 输出端口时,其 IO 功能自动停用。
3. 当 PA5 引脚设定成输入时,对于需要高抗干扰能力的系统,请串接 33Ω 电阻。
注意
4. VDD 是 IC 电源,AVDD 为模拟正电源。在 IC 内部,AVDD 与 VDD 连在一起(double bonding),
而外部为相同引脚。
5. GND 是 IC 接地引脚,而 AGND 是模拟接地引脚。在 IC 内部,AGND 与 GND 连在一起(double
bonding),而外部为相同引脚。
r
to
www.jsmsemi.com
第4/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
4. 中央处理器 (CPU)
4.1. 存储器
4.1.1. 程序存储器 (ROM)
PFC161 的程序存储器记忆体是 MTP(可多次编程),用来存放数据(包含:数据、表格和中断入口)和
要执行的程序指令。PFC161 的程序存储器容量为 2KW,如表 1 所示。
CR
MI
JS
复位之后,程序从 0x000 开始(通常是 goto FPPA0),中断入口在 0x010。
MTP 存储器从地址“0x7E0 to 0x7FF”供系统使用,从“0x001 ~ 0x00F”和“0x011~0x7DF”地址空间是用户的
程序空间。
MTP 程序存储器最后 32 个地址空间是被保留给系统使用,如:校验码,序列号等。
O
0x000
0x001
•
功能
c
mi
Se
地址
FPP0 复位 – goto 指令
用户程序区
•
0x00F
0x011
•
中断入口地址
用户程序区
•
0x7DF
用户程序区
0x7E0
系统使用
•
0x7FF
系统使用
表 1:PFC161 程序存储器结构
r
to
•
c
du
on
0x010
用户程序区
4.1.2. 数据存储器 (SRAM)
PFC161 的数据存储器共有 128 字节,数据存取可以是字节或位的操作。除了存储数据外,数据存储器还
可以担任间接存取方式的数据指针,以及堆栈存储器。
www.jsmsemi.com
第5/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
4.1.3. 系统寄存器
PFC161 的寄存器地址空间与数据存储空间、MTP 程序空间三者互相独立。以下是 PFC161 的各寄存器存
放地址及简要描述:
+1
+2
+3
+4
+5
+6
+7
0x00
FLAG
-
SP
CLKMD
INTEN
INTRQ
T16M
-
0x08
MISC
-
EOSCR
-
INTEGS
PADIER
PBDIER
-
0x10
PA
PAC
PAPH
PAPL
PB
PBC
PBPH
PBPL
0x18
GPCC
GPCS
-
-
TM2C
TM2CT
TM2S
TM2B
0x20
TS
TCC
TKE2
-
TKE1
-
-
-
0x28
TPS2
-
-
TKCH
TKCL
LVDC
-
-
0x30
-
-
TM3C
TM3CT
TM3S
TM3B
-
-
O
CR
MI
JS
+0
SP:堆栈指针寄存器
CLKMD:时钟控制寄存器
EOSCR:外部晶体振荡器控制寄存器
INTEN:中断允许寄存器
PBDIER:端口 B 数字输入启用寄存器
GPCC:比较器控制寄存器
GPCS:比较器选择寄存器
T16M:Timer16 控制寄存器
TM2C / TM3C:Timer2 / Timer3 控制寄存器
c
du
on
INTRQ:中断请求寄存器
PBPL:端口 B 下拉控制寄存器
c
mi
Se
FLAG:标志寄存器
TM2CT / TM3CT:Timer2 / Timer3 计数寄存器
MISC:杂项寄存器
TM2S / TM3S:Timer2 / Timer3 分频寄存器
PA:端口 A 数据寄存器
TM2B / TM3B:Timer2 / Timer3 上限寄存器
PAC:端口 A 控制寄存器
TS:触摸选项寄存器
PAPH:端口 A 上拉控制寄存器
TCC:触摸充电控制寄存器
PAPL:端口 A 下拉控制寄存器
TKE1 / TKE2:触摸按键使能寄存器
PADIER:端口 A 数字输入启用寄存器
TKCH / TKCL:触摸按键充电计数高/低位寄存器
PB:端口 B 数据寄存器
LVDC:低电压检测寄存器
PBC:端口 B 控制寄存器
TPS2:触摸参数设置寄存器
r
to
INTEGS:中断缘选择寄存器
PBPH:端口 B 上拉控制寄存器
www.jsmsemi.com
第6/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
4.1.3.1. 标志寄存器(FLAG),地址 = 0x00
位
初始值
读/写
7–4
-
-
3
-
读/写
描 述
保留。这 4 个位读值为“1”。
OV(溢出标志)。当数学运算溢出时,这一位会设置为 1。
AC(辅助进位标志)。两个条件下,此位设置为 1:
2
-
读/写
(1)是进行低半字节加法运算产生进位
(2)减法运算时,低半字节向高半字节借位。
-
读/写
-
读/写
C(进位标志)。有两个条件下,此位设置为 1:(1)加法运算产生进位 (2)减法运算有
CR
MI
JS
1
0
借位。进位标志还受带进位标志的 shift 指令影响。
Z(零)。此位将被设置为 1,当算术或逻辑运算的结果是 0;否则将被清零。
4.1.3.2. 杂项寄存器(MISC),地址 = 0x08
读/写
7-6
-
-
5
0
只写
4-3
-
-
2
0
只写
描 述
保留。
唤醒时间
0 / 1 : 3000 ILRC (Slow) / 45 ILRC (Fast)
保留。
c
mi
Se
初始值
O
位
停用 LVR 功能:
0 / 1:启用 / 停用
看门狗时钟超时时间设定:
00:8K 个 ILRC 时钟周期
00
只写
01:16K 个 ILRC 时钟周期
10:64K 个 ILRC 时钟周期
11:256K 个 ILRC 时钟周期
4.2. 寻址方式
c
du
on
1–0
r
to
数据存储器的间接存取方式,是以数据存储器当作数据指针来存取数据字节。所有的数据存储器,都可以拿
来当作数据指针,这可以让单片机的资源利用率最大化。PFC161 的数据存储器 128 字节全部都可以用间接方式
来存取。
位寻址只能定义在 RAM 区的 0x00 到 0x3F 空间。
4.3. 堆栈
堆栈存储器是定义在数据储存器里。堆栈存储器的堆栈指针是定义在堆栈指针寄存器;堆栈存储器深度是由
使用者定义的。用户可以依其程序需求来订定所需要堆栈存储器的大小,以保持最大的弹性。
4.3.1. 堆栈指针寄存器(SP),地址 = 0x02
位
初始值
读/写
7–0
-
读/写
描 述
堆栈指针寄存器。读出当前堆栈指针,或写入以改变堆栈指针。请注意 0 位必须维持为 0
。因程序计数器是 16 位。
www.jsmsemi.com
第7/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
4.4. 程序选项 Code Options
选项
Security
选择
描述
MTP 内容加密 7/8 words
Enable(默认)
MTP 内容不加密,程序可被读回
Disable
4.0V
选择 LVR = 4.0V
3.5V
选择 LVR = 3.5V
3.0V
选择 LVR = 3.0V
CR
MI
JS
LVR
选择 LVR = 2.7V
2.5V(默认)
选择 LVR = 2.5V
2.2V
选择 LVR = 2.2V
2.0V
选择 LVR = 2.0V
1.8V
选择 LVR = 1.8V
PA3 & PA4 的驱动电流/灌电流为 strong
Strong
O
PA3_PA4_Drive
2.7V
Normal(默认)
16MHZ(默认)
PA3 & PA4 的驱动电流/灌电流为 normal
当 TM2C[7:4]= 0010, TM2 时钟源= IHRC = 16MHZ
c
mi
Se
当 TM3C[7:4]= 0010, TM3 时钟源= IHRC = 16MHZ
当 TM2C[7:4]= 0010, TM2 时钟源 = IHRC*2 = 32MHZ
TMx_Source
32MHZ
当 TM3C[7:4]= 0010, TM3 时钟源 = IHRC*2 = 32MHZ
(仿真器不支持)
6 Bit(默认)
当 TM2S.7=1, TM2 是 6 位 PWM
当 TM3S.7=1, TM3 是 6 位 PWM
c
du
on
当 TM2S.7=1, TM2 是 7 位 PWM
TMx_Bit
7 Bit
当 TM3S.7=1, TM3 是 7 位 PWM
(仿真器不支持)
All Edge(默认)
Comparator Edge
上升缘和下降缘都触发中断
仅上升缘触发中断
Falling Edge
仅下降缘触发中断
Disable(默认)
比较器和 PWM 相互独立
GPC_PWM
Enable
PA.0(默认)
r
to
Rising Edge
比较器输出控制 PWM 输出(仿真器不支持)
选择 INTEN/INTRQ.Bit0 为 PA.0
Interrupt Src0
PA.5
CS_Sel
选择 INTEN/INTRQ.Bit0 为 PA.5(仿真器不支持)
PA7(默认)
配置引脚 PA7/CS 为触摸的 CS 脚
PB7
配置引脚 PB7/CS 为触摸的 CS 脚
Disable
配置引脚 PA7/PB7/CS 为正常的 IO 脚
Disable
停用 EMI 优选项
EMI
Enable(默认)
系统时钟会轻微调整以获得更好的 EMI 性能
www.jsmsemi.com
第8/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
5. 振荡器和系统时钟
PFC161 提供 3 个振荡器电路:外部晶体振荡器(EOSC)、内部高频 RC 振荡器(IHRC)、内部低频 RC 振荡器
(ILRC)。
这 3 个振荡器可以分别用寄存器 EOSCR.7,CLKMD.4 与 CLKMD.2 启用或停用,使用者可以选择这 3 个振
荡器之一作为系统时钟源,并透过 CLKMD 寄存器来改变系统时钟频率,以满足不同的系统应用。
启用或停用选择
EOSC
EOSCR.7
IHRC
CLKMD.4
ILRC
CLKMD.2
CR
MI
JS
振荡器硬件
表 2:PFC161 提供 3 个振荡器电路
O
5.1. 内部高频振荡器和内部低频振荡
IHRC、ILRC 的频率会因工厂生产、电源电压和温度的变化而变化,请参阅 IHRC、ILRC 频率和 VDD、温
c
mi
Se
度的测量图表。
PFC161 烧录工具提供 IHRC 频率校准(通常校准到 16MHz)功能,以此来消除工厂生产引起的频率漂移。
ILRC 没有校准操作,对于需要精准定时的应用请不要使用 ILRC 的时钟当作参考时间。
c
du
on
5.2. 外部晶体振荡器
外部晶体振荡器的工作频率范围可以从 32KHz 至 4MHz,PFC161 不支持频率在 4MHz 以上的振荡器。图 1
显示了使用外部晶体振荡器的的硬件连接。
r
to
图 1:外部晶体振荡器的的硬件连接
www.jsmsemi.com
第9/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
5.2.1. 外部晶体振荡器控制寄存器(EOSCR),地址 = 0x0A
位
初始值
读/写
7
0
只写
描 述
使能外部晶体振荡器。0 / 1:停用/使能
晶体振荡器的选择。
00:保留
6–5
00
只写
01:低驱动电流。适用于较低频率晶体,例如:32KHz
10:中驱动电流。适用于中等频率晶体,例如:1MHz
11:高驱动电流。适用于较高频率晶体,例如:4MHz
-
保留。请设为 0。
CR
MI
JS
4–0
-
5.2.2. 外部晶体振荡器的使用及注意事项
除了晶振的选择外,外部电容器和寄存器 EOSCR 相关选项也应该适度调整以求得有良好的正弦波。
O
EOSCR.7 是用开启晶体振荡器硬件模块,EOSCR.6 和 EOSCR.5 用于设置振荡器不同的驱动电流,以满足晶
体振荡器不同频率的的要求。
c
mi
Se
表 3 显示了不同的晶体振荡器 C1 和 C2 的推荐值,同时也显示其对应条件下测量的起振时间。由于晶体
或谐振器有其自身的特点,不同类型的晶体或谐振器的启动时间可能会略有不同,请参考其规格并选择恰当的
C1 和 C2 电容值。
C1
4.7pF
C2
起振时间
条件
4.7pF
6ms
(EOSCR[6:5]=11)
1MHz
10pF
10pF
11ms
(EOSCR[6:5]=10)
32KHz
22pF
22pF
450ms
(EOSCR[6:5]=01)
c
du
on
频率
4MHz
表 3:晶体振荡器 C1 和 C2 推荐值
(1) PA7 和 PA6 设定为输入;
(2) PA7 和 PA6 内部上拉电阻设为关闭;
r
to
使用晶振时 PA7 和 PA6 的配置:
(3) 用 PADIER 寄存器将 PA6 和 PA7 设为模拟输入,防止漏电。
注意:请务必仔细阅读《PMC-APN013》之内容,并据此合理使用晶体振荡器。如因用户的晶体振荡器的
质量不佳、使用条件不合理、PCB 清洁剂残留漏电、或是 PCB 板布局不合理等等用户原因,造成的慢起振或
不起振情况,我司不对此负责。
使用晶体振荡器时,使用者必须特别注意振荡器的稳定时间。稳定时间将取决于振荡器频率、晶型、外部
电容和电源电压。在系统时钟切换到晶体振荡器之前,使用者必须确保晶体振荡器是稳定的,相关参考程序如
下所示:
www.jsmsemi.com
第10/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
void
FPPA0 (void)
{
.ADJUST_IC
SYSCLK=IHRC/16, IHRC=16MHz, VDD=5V
...
$
EOSCR
Enable, 4Mhz;
// EOSCR = 0b110_00000;
$
T16M
EOSC, /1, BIT13;
// T16M.Bit13 由 0->1 時,INTRQ.T16 => 1
//假设此时晶体振荡器已稳定
WORD
count
stt16
count;
Intrq.T16 =
=
0;
0;
CR
MI
JS
while (! Intrq.T16)
NULL;
// 从 0x0000 算到 0x2000,然后设置 INTRQ.T16
clkmd=0xB4;
// 切换系统时钟到 EOSC;
clkmd.4 = 0;
// 关闭 IHRC
...
}
O
需要注意,在进入掉电模式前,为保证系统不会被误唤醒,要确保外部晶体振荡器已完全关闭。
5.3.1. 系统时钟
c
mi
Se
5.3. 系统时钟与 IHRC 频率校准
系统时钟的时钟源有 EOSC,IHRC 和 ILRC,PFC161 的时钟系统的硬件框图如图 2 所示。
c
du
on
CLKMD[7:5]
IHRC
时钟
÷2, ÷4, ÷8,
÷16, ÷32, ÷64
÷1, ÷2,÷4, ÷8
ILRC
时钟
÷1, ÷2, ÷4, ÷16
r
to
EOSC
时钟
多
任
务
器
系统时钟
CLK
图 2:系统时钟源选择
www.jsmsemi.com
第11/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
5.3.1.1. 时钟控制寄存器(CLKMD),地址 = 0x03
位
初始值 读/写
描 述
系统时钟选择
类型 0,CLKMD[3]=0
7–5
111
读/写
类型 1,CLKMD[3]=1
000:IHRC/16
001:IHRC/2
001:IHRC/8
010:保留
010:ILRC/16(仿真器不支持)
011:EOSC/4
011:IHRC/32
100:EOSC/2
100:IHRC/64
101:EOSC
101:EOSC/8
110:ILRC/4
110:ILRC/2
111:ILRC(默认)
其他:保留
CR
MI
JS
000:IHRC/4
读/写 内部高频 RC 振荡器功能。 0/1:停用/启用
4
1
3
0
2
1
读/写
1
1
读/写 看门狗功能。 0/1:停用/启用
0
0
读/写 引脚 PA5/PRSTB 功能。0 / 1:PA5 / PRSTB
0 / 1:类型 0 /类型 1
内部低频 RC 振荡器功能。0/1:停用/启用
c
mi
Se
当内部低频 RC 振荡器功能停用时,看门狗功能同时被关闭。
c
du
on
5.3.2. 频率校准
时钟类型选择。这个位是用来选择位 7~位 5 的时钟类型。
O
读/写
IHRC 校准的功能是在用户编译程序时序做选择,校准命令以及校准选项将自动插入到用户程序中。校准
命令如下所示:
p1 =2,4,8,16,32;以提供不同的系统时钟。
p2 =16〜18;校准芯片到不同的频率,通常选择 16MHz。
r
to
.ADJUST_IC SYSCLK=IHRC/(p1), IHRC=(p2)MHz, VDD=(p3)V;
p3 =2.2〜5.5;根据不同的电源电压校准芯片。
通常情况下,ADJUST_IC 是开机后的第一个命令,用以设定系统的工作频率。IHRC 频率校准的程序只在
将程序代码写入 MTP 存储器的时候执行一次,此后不会再被执行。
如果 IHRC 校准选择不同的选项,开机后的系统状态也是不同的。IHRC 频率校准以及系统时钟的选项,
如表 4 所示:
www.jsmsemi.com
第12/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
SYSCLK
CLKMD
描述
IHRCR
○ Set IHRC / 2
= 34h (IHRC / 2)
有校准
IHRC 校准到 16MHz, CLK=8MHz (IHRC/2)
○ Set IHRC / 4
= 14h (IHRC / 4)
有校准
IHRC 校准到 16MHz, CLK=4MHz (IHRC/4)
○ Set IHRC / 8
= 3Ch (IHRC / 8)
有校准
IHRC 校准到 16MHz, CLK=2MHz (IHRC/8)
○ Set IHRC / 16
= 1Ch (IHRC / 16)
有校准
IHRC 校准到 16MHz, CLK=1MHz (IHRC/16)
○ Set IHRC / 32
= 7Ch (IHRC / 32)
有校准
IHRC 校准到 16MHz, CLK=0.5MHz (IHRC/32)
○ Set ILRC
= E4h (ILRC / 1)
有校准
IHRC 校准到 16MHz, CLK=ILRC
○ Disable
没改变
没改变
IHRC 不校准, CLK 没改变
CR
MI
JS
表 4:IHRC 频率校准选项
下面显示在不同的选项下,PFC161 不同的状态:
(1) .ADJUST_IC
SYSCLK=IHRC/2, IHRC=16MHz, VDD=5V
O
开机后,CLKMD = 0x34:
a. IHRC 的校准频率为 16MHz@VDD=5V,启用 IHRC 的硬件模块
b. 系统时钟 = IHRC/2 = 8MHz
c. 看门狗被停用,启用 ILRC,PA5 是在输入模式
c
mi
Se
(2) .ADJUST_IC
SYSCLK=IHRC/8, IHRC=16MHz, VDD=2.5V
(3) .ADJUST_IC
c
du
on
开机后,CLKMD = 0x3C:
a. IHRC 的校准频率为 16MHz@VDD=2.5V,启用 IHRC 的硬件模块
b. 系统时钟 = IHRC/8 = 2MHz
c. 看门狗被停用,启用 ILRC,PA5 是在输入模式
SYSCLK=ILRC, IHRC=16MHz, VDD=5V
(4) .ADJUST_IC
DISABLE
开机后,CLKMD 寄存器没有改变(没任何动作):
a. IHRC 不校准并且 IHRC 模块停用
b. 系统时钟 = ILRC 或 IHRC/64
c. 看门狗被启用,启用 ILRC,PA5 是在输入模式
www.jsmsemi.com
r
to
开机后,CLKMD = 0xE4:
a. IHRC 的校准频率为 16MHz@VDD=5V, 停用 IHRC 的硬件模块
b. 系统时钟 = ILRC
c. 看门狗被停用,启用 ILRC,PA5 是在输入模式
第13/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
5.3.2.1. 特别声明
(1) IHRC 的校正操作是在 IC 烧录时进行的。
(2) IC 塑封材料(不论是封装用还是 COB 用的黑胶)的特牲会对 IHRC 的频率有一定影响。如果用户在 IC 盖上
塑封材料前进行烧录,然后再封上塑封材料,则可能造成 IHRC 的特性偏移超出规格的现象,正常情况下频
率会变慢一些。
(3) 上述问题通常发生在用户使用 COB 封装或是委托我司进行晶圆代烧(QTP)时。此情况下我司将不对频率超出
规格的情况负责。
(4) 用户可按自身经验进行一些补偿性调整,例如把 IHRC 的目标频率调高 0.5%-1%左右,令封装后 IC 的 IHRC
CR
MI
JS
频率更接近目标值。
5.3.3. 系统时钟切换
IHRC 校准后,透过 CLKMD 寄存器的设定,PFC161 系统时钟可以随意在 IHRC,ILRC 和 EOSC 之间切
O
换。但必须注意,不可在切换系统时钟的同时把原时钟源关闭。例如:从 A 时钟源切换到 B 时钟源时,应该先
把系统时钟源切换到 B,
然后再关闭 A 时钟源。
请参阅 IDE:
“使用手册” -> “IC 介绍” -> “绶存器介绍” -> “CLKMD”。
c
mi
Se
例 1: 系统时钟从 ILRC 切换到 IHRC/2
…
//
系统时钟为 ILRC
//
先打开 IHRC,可以提高抗干扰能力
=
1;
CLKMD
=
0x34;
//
切换为 IHRC/2,ILRC 不能在这里停用
//
=
0;
//
假如需要,ILRC 可以在这里停用
//
系统时钟为 IHRC/2
CLKMD.2
…
例 2: 系统时钟从 IHRC/2 切换到 EOSC
…
c
du
on
CLKMD.4
=
0XB0;
//
切换为 EOSC,IHRC 不能在这里停用
CLKMD.4
=
0;
//
IHRC 可以在这里停用
…
例 3: 系统时钟从 IHRC/2 切换到 IHRC/4
…
CLKMD
=
0X14;
r
to
CLKMD
//
系统时钟为 IHRC/2, ILRC 为启用
//
切换为 IHRC/4
…
例 4: 系统可能当机,如果同时切换时钟和关闭原来的振荡器
…
CLKMD
=
0x30;
//
系统时钟为 ILRC
//
不能从 ILRC 切换到 IHRC/2,同时又关闭 ILRC 振荡器
…
www.jsmsemi.com
第14/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
6. 系统复位与电压检测
引起 PFC161 复位的原因有四种:上电复位、LVR 复位、看门狗超时溢出复位和 PRSTB 引脚复位。发生复
位后,系统会重新启动,程序计数器会跳跃到地址 0x000,PFC161 的所有寄存器将被设置为默认值。
6.1. 上电复位(POR)
开机时,POR(Power On Reset)是用于复位 PFC161,其时序图如图 3 所示。用户必须确保上电后电源电压
CR
MI
JS
稳定。
发生上电复位时,PFC161 数据存储器的值处于不确定的状态。
O
c
du
on
c
mi
Se
图 3:上电复位时序图
6.2. 低电压复位(LVR)
若 VDD 下降到低于 LVR(Low Voltage Reset)电压水平,系统会发生 LVR 复位,其时序图如图 4。当 LVR
r
to
复位时,PFC161 数据存储器的值处于不确定的状态。
图 4:LVR 复位时序图
www.jsmsemi.com
第15/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
LVR 水平的选择在程序编译时进行。使用者必须结合单片机工作频率和电源电压来选择 LVR,才能让单片机稳
定工作。下面是工作频率、电源电压和 LVR 水平设定的建议:
系统时钟
VDD
LVR
8MHz
≧ 3.5V
≧3.5V
4MHz
≧ 2.5V
≧2.5V
2MHz
≧ 2.2V
≧2.2V
CR
MI
JS
表 5:LVR 设置参考,与系统频率、VDD 之间的关系
(1) 只有当 IC 正常起动后,设定 LVR(1.8V ~ 4.0V)才会有效。
(2) 可以设定寄存器 MISC.2 为 1 将 LVR 关闭,但此时应确保 VDD 在最低工作电压以上,否则 IC 可能工作不
正常。
(3) 在省电模式 stopexe 和掉电模式 stopsys 下,LVR 功能无效。
O
c
mi
Se
杂项寄存器(MISC),地址 = 0x08
初始值
读/写
7–6
-
-
5
0
只写
4-3
-
-
2
0
只写
描 述
保留。
唤醒时间。
保留。
c
du
on
位
停用 LVR 功能。0 / 1:启用 / 停用
看门狗时钟超时时间设定:
00:8K 个 ILRC 时钟周期
1–0
00
只写
01:16K 个 ILRC 时钟周期
11:256K 个 ILRC 时钟周期
www.jsmsemi.com
r
to
10:64K 个 ILRC 时钟周期
第16/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
6.3. 看门狗超时溢出复位
看门狗是一个计数器,其时钟源来自 ILRC,所以当 ILRC 关闭时,看门狗也会失效。ILRC 的频率有可能因
为工厂制造的变化,电源电压和工作温度而漂移很多,使用者必须预留安全操作范围。
为确保看门狗在超时溢出之前被清零,在安全时间内,可以用指令 wdreset 清零看门狗。在上电复位(POR)
或任何时候使用 wdreset 指令,看门狗都会被清零。
当看门狗超时溢出时,PFC161 将复位并重新运行程序,其复位时序图如图 5 所示。发生 WDT 复位时,
CR
MI
JS
PFC161 数据存储器的值将被保留。
O
c
mi
Se
c
du
on
图 5:看门狗超时溢出的相关时序
利用寄存器 MISC[1:0]可选择四种不同的看门狗超时时间,利用 CLKMD.1 可以选择将看门狗功能停用。
时钟控制寄存器(CLKMD),地址 = 0x03
初始值
读/写
描 述
7-5
111
读/写
系统时钟选择
4
1
读/写
内部高频 RC 振荡器功能。 0/1:停用/启用
3
0
读/写
时钟类型选择
2
1
读/写
1
1
读/写
看门狗功能。 0/1:停用/启用
0
0
读/写
引脚 PA5/PRSTB 功能。0 / 1:PA5 / PRSTB
r
to
位
内部低频 RC 振荡器功能。 0/1:停用/启用
当 ILRC 关闭时,看门狗也会失效
www.jsmsemi.com
第17/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
6.4. 外部复位(PRSTB)
PFC161 支持外部复位功能,其外部复位引脚与 PA5 共享同一个 IO 端口。使用外部复位功能需要:
(1)
设定 PA5 为输入;
(2)
设定 CLKMD.0=1,使 PA5 为外部 PRSTB 输入脚位。
在外部复位引脚为高电平时,系统处于正常工作状态;一旦复位引脚检测到低电平,系统即发生复位。PRSTB
复位时序图如图 6 所示。
当发生 PRSTB 复位时,PFC161 数据存储器的值将被保留。
O
CR
MI
JS
c
mi
Se
图 6:外部引脚复位的相关时序
c
du
on
6.5. 系统电压检测器 - LVD
PFC161 内置一个 VDD 电压检测器,用于快速检测芯片的工作电压水平。
通过寄存器 LVDC[7:4],用户可以从 1.8V 到 4.5V 共 16 个电平中选择一个来与 VDD 电压进行比较。通过读
取 LVDC.0 的比较结果,用户就可以监控系统电源是否在预设电平之内。
位
初始值
读/写
7-4
0000
WO
3-1
-
-
描述
LVD 电压水平选择
0000 : 1.8V
0001 : 1.9V
0010 : 2.0V
0011 : 2.1V
0100 : 2.2V
0101 : 2.3V
0110 : 2.4V
0111 : 2.5V
r
to
6.5.1. 低电压检测寄存器(LVDC), 地址 = 0x2D
1000 : 2.75V
1001 : 3.0V
1010 : 3.15V
1011 : 3.3V
1100 : 3.5V
1101 : 3.75V
1110 : 4.0V
1111 : 4.5V
保留
VDD 电压检测结果
0
-
RO
0: VDD > LVD
1: VDD < LVD
www.jsmsemi.com
第18/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
7. 系统工作模式
PFC161 有三个由硬件定义的操作模式,分别为:
(1) 正常工作模式
(2) 电源省电模式
(3) 掉电模式
正常工作模式是所有功能都正常运行的状态;
CR
MI
JS
省电模式(stopexe)是在降低工作电流而且 CPU 保持在随时可以继续工作的状态;
掉电模式(stopsys)是用来深度的节省电力。
省电模式适合在偶尔需要唤醒的系统工作,掉电模式是在非常低消耗功率且很少需要唤醒的系统中使用。
O
7.1. 省电模式(“stopexe”)
c
mi
Se
使用 stopexe 指令进入省电模式,只有系统时钟被停用,其余所有的振荡器模块都继续工作。所以只有 CPU
是停止执行指令。输入引脚切换引起的系统唤醒可视为单片机继续正常的运行。
省电模式的详细信息如下所示:
(1) IHRC 和振荡器模块:没有变化。如果它被启用,它仍然继续保持活跃。
(2) ILRC 振荡器模块:必须保持启用,唤醒时需要靠 ILRC 启动。
(4) MTP 存储器被关闭。
c
du
on
(3) 系统时钟停用,因此,CPU 停止执行。
(5) Timer 计数器:若 Timer 计数器的时钟源是系统时钟或其相应的时钟振荡器模块被停用,则 Timer 停止
计数;否则,仍然保持计数。(其中,Timer 包含 Timer16,TM2,TM3。)
r
to
(6) 唤醒来源:
a. IO Toggle 唤醒: IO 在数字输入模式下的电平变换(PxC 位是 0,PxDIER 位是 1)。
b. Timer 唤醒:如果计数器(Timer)的时钟源不是系统时钟,则当计数到设定值时,系统会被唤醒。
c.比较器唤醒:使用比较器唤醒时,需同时设定 GPCC.7 为 1 与 GPCS.6 为 1 来启用比较器唤醒功能。
但请注意:内部 1.20V Bandgap 参考电压不适用于比较器唤醒功能。
以下例子是利用 Timer16 来唤醒系统因 stopexe 的省电模式:
$ T16M ILRC, /1, BIT8
// Timer16 设置
…
WORD
count
=
0;
STT16
count;
stopexe;
…
//Timer16 的初始值为 0,在 Timer16 计数了 256 个 ILRC 时钟后,系统将被唤醒。
www.jsmsemi.com
第19/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
7.2. 掉电模式(“stopsys”)
掉电模式是深度省电的状态,所有的振荡器模块都会被关闭。使用 stopsys 指令可以使芯片直接进入掉电模
式。在下达 stopsys 指令之前建议将 GPCC.7 设为 0 来关闭比较器。
输入引脚的唤醒可视为程序正常运行,为了降低功耗,进入掉电模式之前,所有的 I/O 引脚应仔细检查,避
免悬空而漏电。
下面显示发出 stopsys 命令后,PFC161 内部详细的状态:
(1) 所有的振荡器模块被关闭。
CR
MI
JS
(2) MTP 存储器被关闭。
(3) SRAM 和寄存器内容保持不变。
(4) 唤醒源:IO 在数字输入模式下电平变换(PxDIER 位是 1)。
掉电模式参考示例程序如下所示:
=
CLKMD.4 =
0xF4;
O
CLKMD
// 系统时钟从 IHRC 变为 ILRC,关闭看门狗时钟
0;
//
c
mi
Se
…
while (1)
{
// 进入掉电模式
stopsys;
(…)
break;
// 假如发生唤醒而且检查 OK,就返回正常工作
c
du
on
if
IHRC 停用
// 否则,停留在掉电模式。
}
CLKMD
=
// 系统时钟从 ILRC 变为 IHRC/2
0x34;
r
to
7.3. 唤醒
进入掉电或省电模式后,PFC161 可以通过切换 IO 引脚恢复正常工作。而 Timer 的唤醒只适用于省电模式。
表 6 显示 stopsys 掉电模式和 stopexe 省电模式在唤醒源的差异。
掉电模式(stopsys)和省电模式 (stopexe)在唤醒源的差异
切换 IO 引脚
计时器唤醒
比较器唤醒
stopsys
是
否
否
stopexe
是
是
是
表 6:掉电模式和省电模式在唤醒源的差异
www.jsmsemi.com
第20/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
当使用 IO 引脚来唤醒 PFC161,寄存器 PxDIER 应正确设置,使每一个相应的引脚可以有唤醒功能。从唤醒
事件发生后开始计数,正常的唤醒时间大约是 3000 个 ILRC 时钟周期,另外,PFC161 提供快速唤醒功能,透过
MISC 寄存器选择快速唤醒大约 45 个 ILRC 时钟周期。
模式
唤醒模式
STOPEXE 省电模式
快速唤醒
STOPSYS 掉电模式
CR
MI
JS
STOPEXE 省电模式
正常唤醒
STOPSYS 掉电模式
切换 IO 引脚的唤醒时间(tWUP)
45 * TILRC,
这里的 TILRC 是指 ILRC 时钟周期
3000* TILRC,
这里的 TILRC 是指 ILRC 时钟周期
表 7:快速唤醒和正常唤醒的时间差异
8. 中断
O
PFC161 有 8 个中断源:
外部中断源 PA0/PA5
外部中断源 PB0
Timer16 中断源
Timer2 中断源
Timer3 中断源
比较器中断源
2 个触摸按键中断(TK_OV 和 TK_END)。
c
du
on
c
mi
Se
r
to
中断硬件框图请参考图 7。每个中断请求源都有自己的中断控制位启用或停用它。所有的中断请求标志位是
由硬件置位并且并通过软件写寄存器 INTRQ 清零。中断请求标志设置点可以是上升沿或下降沿或两者兼而有之,
这取决于对寄存器 INTEGS 的设置。所有的中断请求源最后都需由 engint 指令控制(启用全局中断)使中断运行,
以及使用 disgint 指令(停用全局中断)停用它。
中断堆栈是共享数据存储器,其地址由堆栈寄存器 SP 指定。由于程序计数器是 16 位宽度,堆栈寄存器 SP
位 0 应保持 0。此外,用户可以使用 pushaf 指令存储 ACC 和标志寄存器的值到堆栈,以及使用 popaf 指令将值
从堆栈恢复到 ACC 和标志寄存器中。由于堆栈与数据存储器共享,在 Mini-C 模式,堆栈位置与深度由编译程序
安排。在汇编模式或自行定义堆栈深度时,用户应仔细安排位置,以防地址冲突。
在中断服务程序中,可以通过读取寄存器 INTRQ 知道中断发生源。
注:可在 Code Option Interrupt Src0 或 Interrupt Src1 中切换外部中断源。
www.jsmsemi.com
第21/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
Timer3
output
Detect
event
INTEN.7
INTRQ.7
INTEN.6
Timer2
output
Detect
event
TK_OV
Detect
event
INTRQ.6
Interrupt
to FPP0
INTEN.5
INTRQ.5
CR
MI
JS
INTEN.4
GPC output
TK_END
PA0/PA5
Detect
rising
edge
INTRQ.3
Detect
rising
edge
engint / disgint
OR
INTEN.3
Note: “engint” and
“disgint” are instructions
INTEN.2
INTRQ.2
INTEN.1
c
mi
Se
PB0
INTRQ.4
O
T16 output
Detect
rising
edge
Detect
both
edge
INTRQ.1
Detect
both
edge
INTRQ.0
INTEN.0
c
du
on
图 7:中断硬件框图
8.1. 中断允许寄存器(INTEN),地址 = 0x04
初始值
读/写
描述
7
0
读/写
启用从 Timer3 的溢出中断。0/1:停用/启用
6
0
读/写
启用从 Timer2 的溢出中断。0/1:停用/启用
5
0
读/写
启用从触摸按键的 TK_OV 中断。0/1:停用/启用
4
0
读/写
启用从比较器的溢出中断。0/1:停用/启用
3
0
读/写
启用从触摸按键的 TK_END 中断。0/1:停用/启用
2
0
读/写
启用从 Timer16 的溢出中断。0/1:停用/启用
1
0
读/写
启用从 PB0 的中断。0/1:停用/启用
0
0
读/写
启用从 PA0/PA5 的中断。0/1:停用/启用
www.jsmsemi.com
r
to
位
第22/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
8.2. 中断请求寄存器(INTRQ),地址 = 0x05
初始值
读/写
描述
7
-
读/写
Timer3 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
6
-
读/写
Timer2 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
5
-
读/写
触摸按键 TK_OV 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
4
-
读/写
比较器的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
3
-
2
-
1
-
0
-
CR
MI
JS
位
读/写
触摸按键 TK_END 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
读/写
Timer16 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
读/写
PB0 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
读/写
PA0/PA5 的中断请求,此位是由硬件置位并由软件清零。 0/1:不要求/请求
O
注意:INTEN,INTRQ 没有初始值,所以要使用中断前,一定要根据需要设定数值。即使 INTEN 为 0,INTRQ 还是
会被中断发生源触发。
c
mi
Se
8.3. 中断边缘选择寄存器(INTEGS), 地址 = 0x0C
Bit
Reset R/W
-
4
-
WO
3-2
-
WO
1-0
-
WO
保留,请设为 0。
Timer16 中断边缘选择:
0 : 上升缘请求中断。
1 : 下降缘请求中断。
PB0 中断边缘选择:
00 : 上升缘和下降缘都请求中断。
01 : 上升缘请求中断。
10 : 下降缘请求中断。
11 : 保留。
PA0 / PA5 中断边缘选择:
00 : 上升缘和下降缘都请求中断。
01 : 上升缘请求中断。
10 : 下降缘请求中断。
11 : 保留。
www.jsmsemi.com
r
to
-
c
du
on
7-5
Description
第23/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
8.4. 中断工作流程
一旦发生中断,其具体工作流程如下:
(1) 程序计数器将自动存储到 SP 寄存器指定的堆栈存储器。
(2) 新的 SP 将被更新为 SP+2。
(3) 全局中断将自动被停用。
(4) 将从地址 0x010 获取下一条指令。
CR
MI
JS
中断完成后,发出 reti 指令返回既有的程序,其具体工作流程如下:
(1) 从 SP 寄存器指定的堆栈存储器自动恢复程序计数器。
(2) 新的 SP 将被更新为 SP-2。
(3) 全局中断将自动启用。
O
(4) 下一条指令将是中断前原来的指令。
c
mi
Se
8.5. 中断的一般步骤
步骤 1:设定 INTEN 寄存器,开启需要的中断的控制位。
步骤 2:清除 INTRQ 寄存器。
步骤 3:主程序中,使用 engint 指令(启用全局中断)允许 CPU 的中断功能。
步骤 4:等待中断。中断发生后,跳入中断子程序。
c
du
on
步骤 5:当中断子程序执行完毕,返回主程序。
跳入中断子程序处理时,可使用 pushaf 指令来保存 ALU 和 FLAG 寄存器数据,并在 reti 之前,使用 popaf
指令复原。一般步骤如下:
Interrupt (void)
// 中断发生后,跳入中断子程序,
r
to
void
// 自动进入 disgint 的状态,CPU 不会再接受中断
{
PUSHAF;
…
POPAF;
}
// 系统自动填入 reti,直到执行 reti 完毕才自动恢复到 engint 的状态
* 在主程序中,可使用 disgint 指令关闭所有中断。
www.jsmsemi.com
第24/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
8.6. 使用中断举例
使用者必须预留足够的堆栈存储器以保存中断向量,一级中断需要两个字节,两级中断需要四个字节。下面
的示例程序演示了如何处理中断,请注意,处理中断和 pushaf 是需要四个字节堆栈存储器。
void
{
FPPA0
(void)
...
$
INTEN
// INTEN =1;当 PA0 准位改变,产生中断请求
PA0;
CR
MI
JS
INTRQ
=
// 清除 INTRQ
0;
// 启用全局中断
ENGINT
...
// 停用全局中断
DISGINT
...
O
}
Interrupt (void)
//
中断程序
//
存储 ALU 和 FLAG 寄存器
{
PUSHAF
c
mi
Se
void
//
如果 INTEN.PA0 在主程序会动态开和关,则表达式中可以判断 INTEN.PA0 是否为 1。
//
例如: If (INTEN.PA0 && INTRQ.PA0)
//
如果 INTEN.PA0 一直在使能状态,就可以省略判断 INTEN.PA0,以加速中断执行。
//
INTRQ.PA0 = 0;
PA0 的中断程序
// 只须清除相对应的位 (PA0)
...
}
r
to
{
c
du
on
If (INTRQ.PA0)
{…}
...
// (X:) INTRQ = 0;
// 不建议在中断程序最后,才使用 INTRQ = 0 一次全部清除
// 因为它可能会把刚发生而尚未处理的中断,意外清除掉
POPAF
// 回复 ALU 和 FLAG 寄存器
}
www.jsmsemi.com
第25/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
9. I/O 端口
9.1. IO 相关寄存器
9.1.1. 端口 A 数字输入启用寄存器(PADIER),地址 = 0x0D
初始值
读/写
7-6
11
只写
5
1
只写
4-3
11
只写
2-1
-
-
0
1
描述
使能 PA7~PA6 数字输入和唤醒事件。
1 / 0:启用/ 停用
当使用外部晶体振荡器的时候,该位设为 0 防止耗电。
使能 PA5 数字输入、唤醒事件和中断请求。
1 / 0:启用/ 停用
使能 PA4 ~ PA3 数字输入和唤醒事件。
1 / 0:启用/ 停用
保留。
使能 PA0 数字输入、唤醒事件和中断请求。
1 / 0:启用 / 停用
CR
MI
JS
位
只写
O
9.1.2. 端口 B 数字输入启用寄存器(PBDIER),地址 = 0x0E
初始值
读/写
7
1
只写
6-1
-
-
0
1
只写
描述
c
mi
Se
位
使能 PB7 数字输入和唤醒事件。
0 / 1:停用 / 启用
保留
使能 PB0 数字输入、唤醒事件和中断请求。
0 / 1:停用 / 启用
位
初始值
读/写
7–0
0x00
读/写
c
du
on
9.1.3. 端口 A 数据寄存器(PA),地址 = 0x10
描 述
数据寄存器的端口 A。
位
初始值
读/写
7–0
0x00
读/写
描 述
r
to
9.1.4. 端口 A 控制寄存器(PAC),地址 = 0x11
端口 A 控制寄存器。这些寄存器是用来定义端口 A 每个相应引脚的输入模式或输出模式。
0 / 1:输入/输出
9.1.5. 端口 A 上拉控制寄存器(PAPH),地址 = 0x12
位
初始值
读/写
7-0
0x00
读/写
描 述
端口 A 上拉控制寄存器。该寄存器是用来控制端口 A 每个相应引脚的上拉功能。
0/1:停用/启用
www.jsmsemi.com
第26/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
9.1.6. 端口 A 下拉控制寄存器(PAPL),地址 = 0x13
位
初始值
读/写
7-0
0x00
读/写
描 述
端口 A 下拉控制寄存器。该寄存器是用来控制端口 A 每个相应引脚的下拉功能。
0/1:停用/启用
9.1.7. 端口 B 数据寄存器(PB),地址 = 0x14
位
初始值
读/写
7–0
0x00
读/写
描 述
数据寄存器的端口 B。
CR
MI
JS
9.1.8. 端口 B 控制寄存器(PBC),地址 = 0x15
位
初始值
读/写
7–0
0x00
读/写
描 述
端口 B 控制寄存器。这些寄存器是用来定义端口 B 每个相应的引脚的输入模式或输出模
式。0/1:输入/输出
O
9.1.9. 端口 B 上拉控制寄存器(PBPH),地址 = 0x16
初始值
读/写
7–0
0x00
读/写
c
mi
Se
位
描 述
端口 B 上拉控制寄存器。这些寄存器是用来控制端口 B 每个相应引脚上拉电阻的使能。
0/1:停用/启用
位
初始值
读/写
7–0
0x00
读/写
c
du
on
9.1.10. 端口 B 下拉控制寄存器(PBPL),地址 = 0x17
描 述
端口 B 下拉控制寄存器。这些寄存器是用来控制端口 B 每个相应引脚下拉电阻的使能。
0/1:停用/启用
r
to
www.jsmsemi.com
第27/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
9.2. IO 结构及功能
9.2.1. IO 引脚的结构
PFC161 的所有 IO 引脚都具有相同的结构,如下图 8。
O
CR
MI
JS
c
mi
Se
图 8:引脚缓冲区硬件图
9.2.2. IO 引脚的一般功能
c
du
on
(1) 输入、输出功能:
PFC161 所有 IO 引脚都可编程设定为数字输入或模拟输入、低输出或高输出。
透过数据寄存器(PA/PB),控制寄存器(PAC/PBC)和上拉、下拉控制寄存器(PAPH/PBPH、 PAPL/PBPL)
r
to
设定,每一 IO 引脚都可以独立配置成不同的功能。
当引脚被用做模拟输入功能时,为减少漏电流,请关闭 PxDIER 寄存器相应位的数字输入功能。
当这些引脚为输出状态时,其弱上拉/下拉电阻会自动关闭。
如果要读取端口上的电位状态,一定要先将端口设置成输入模式;在输出模式下,读取到的数据是数据寄
存器的值。表 8 为端口 PA0 的设定配置表。
描述
PA.0 PAC.0 PAPH.0 PAPL.0
X
0
0
0
输入悬空,没有上拉/下拉电阻
X
0
1
0
输入,有上拉电阻
X
0
0
1
输入,有下拉电阻
X
0
1
1
输入,有上拉/下拉电阻
0
1
X
X
输出低电位
1
1
X
X
输出高电位
表 8:PA0 设定配置表
www.jsmsemi.com
第28/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
(2) 睡眠唤醒功能:
当 PFC161 在掉电或省电模式,每一个引脚都可以切换其状态来唤醒系统。对于需用来唤醒系统的引脚,
必须设置为输入模式以及寄存器 PxDIER 相应位为高。
(3) 外部中断功能:
当 IO 作为外部中断引脚时,PxDIER 相应位应设置高。例,当 PA0 用来作为外部中断引脚时,PADIER.0
应设置高。
CR
MI
JS
(4) 驱动能力可选:
部分引脚可通过程序选项 Drive 来调整驱动电流和灌电流。
9.2.3. IO 使用与设定
O
c
mi
Se
(1) IO 作为数字输入
将 IO 设为数字输入时,Vih 与 Vil 的准位,会随着工作电压和温度有变动。请参考 Vih 最小值和 Vil 最大值。
内部上拉电阻值也将随着电压、温度与引脚电压而变动,并非为固定值。
(2) IO 作为数字输入和打开唤醒功能
c
du
on
用 PxC 寄存器,将 IO 设为输入。
用 PxDIER 寄存器,将对应的位设为 1 以启用数字输入。
为了防止 PA 中没有用到的 IO 口漏电,PADIER[1:2]需要常设为 0。
r
to
(3) PA5 作为 PRSTB 输入
设定 PA5 为输入。
设定 CLKMD.0=1,使 PA5 为外部 PRSTB 输入脚位。
(4) PA5 作为输入并通过长导线连接至按键或者开关
必需在 PA5 与长导线中间串接 >10 Ω 电阻。
应尽量避免使用 PA5 作为输入。
www.jsmsemi.com
第29/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10. Timer / PWM 计数器
10.1.
16 位计数器 (Timer16)
10.1.1. Timer16 介绍
PFC161 内置一个 16 位硬件计数器 Timer16(T16),其模块框图如图 9。
计数器时钟源由寄存器 T16M[7:5]来选择,在时钟送到 16 位计数器(counter16)之前,T16M[4:3]可对时
钟进行预分频处理,有÷1、÷4、÷16、÷64 等四种选项,让计数范围更大。
CR
MI
JS
T16M[2:0]用于选择 Timer16 的中断源,其来自于 16 位计数器的位 8 到位 15。
当计数器溢出时,
Timer16
就触发中断。经由寄存器 INTEGS.4,可选择中断类型是上升沿触发或下降沿触发。
16 位计数器只能向上计数,计数器初始值可以用 stt16 指令设定,计数器的数值可以用 ldt16 指令存储
到数据存储器。
O
c
du
on
c
mi
Se
r
to
图 9:Timer16 模块框图
Timer16 的语法定义在.inc 文件中。T16M 共有三个配置参数,第一个参数用来定义 Timer16 的时钟源,
第二个参数用来定义预分频器,第三个参数是确定中断源。
T16M IO_RW
0x06
$ 7~5:
STOP, SYSCLK, X, PA4_F, IHRC, EOSC, ILRC, PA0_F // 第一个参数
$ 4~3:
/1, /4, /16, /64
// 第二个参数
$ 2~0: BIT8, BIT9, BIT10, BIT11, BIT12, BIT13, BIT14, BIT15
// 第三个参数
www.jsmsemi.com
第30/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
使用者可以依照系统的要求来定义 T16M 参数,例子如下:
$ T16M
SYSCLK, /64, BIT15;
// 选择(SYSCLK/64) 当 Timer16 时钟源,每 2^16 个时钟周期产生一次 INTRQ.2=1
// 系统时钟 System Clock = IHRC / 2 = 8 MHz
// SYSCLK/64 = 8 MHz/64 = 8 uS,约每 524 mS 产生一次 INTRQ.2=1
$ T16M
PA0, /1, BIT8;
// 选择 PA0 当 Timer16 时钟源,每 2^9 个时钟周期产生一次 INTRQ.2=1
// 每接收 512 个 PA0 时钟周期产生一次 INTRQ.2=1
CR
MI
JS
$ T16M
STOP;
// 停止 Timer16 计数
10.1.2. Timer16 控制寄存器(T16M),地址 = 0x06
位
初始值
读/写
描 述
O
Timer16 时钟选择:
000:停用 Timer16
c
mi
Se
001:CLK 系统时钟
010:保留
7–5
000
读/写
011:PA4 下降沿(外部事件)
100:IHRC
110:ILRC
111:PA0 下降沿(外部事件)
Timer16 内部的时钟分频器。
00:÷1
00
读/写
01:÷4
r
to
4–3
c
du
on
101:EOSC
10:÷16
11:÷64
中断源选择。当选择位由低变高或由高变低时,发生中断事件。
0:Timer16 位 8
1:Timer16 位 9
2:Timer16 位 10
2–0
000
读/写
3:Timer16 位 11
4:Timer16 位 12
5:Timer16 位 13
6:Timer16 位 14
7:Timer16 位 15
www.jsmsemi.com
第31/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10.1.3. Timer16 溢出时间
当设定 $ INTEGS BIT_R 时(这是 IC 默认值),且设定 T16M 计数器 BIT8 产生中断,若 T16 计数从
0 开始 ,则第一次中断是在计数到 0x100 时发生(BIT8 从 0 到 1),第二次中断在计数到 0x300 时发生(BIT8
从 0 到 1)。所以设定 BIT8 是计数 512 次才中断。请注意,如果在中断中重新给 T16M 计数器设值,则下
一次中断也将在 BIT8 从 0 变 1 时发生。
如果设定 $ INTEGS
BIT_F(BIT 从 1 到 0 触发)而且设定 T16M 计数器 BIT8 产生中断,则 T16 计
数改为每次数到 0x200/0x400/0x600/…时发生中断。两种设定 INTEGS 的方法各有好处,也请注意其中差
10.2.
CR
MI
JS
异。
8 位 PWM 计数器(Timer2,Timer3)
PFC161 内置 2 个 8 位 PWM 硬件定时器(Timer2/TM2,Timer3/TM3),两个计数器的原理一样,以下以
O
Timer2 来说明,TM2 硬件框图请参考图 10。
寄存器 TM2C[7:4]用来选择定时器时钟;TM2C[3:2]用来选择 Timer2 的输出。寄存器 TM2S[6:0]用于选
c
mi
Se
择时钟分频处理。寄存器 TM2B 用来控制定时器的计数上限,当计数值达到 TM2B 设定的上限时,定时器
将自动清零。寄存器 TM2CT 用于设置或读取定时器的计数值。
8 位 PWM 定时器的工作模式有周期模式和 PWM 模式两种。周期模式用于输出固定周期波形;PWM
模式是用来产生 PWM 输出波形,PWM 分辨率可以为 6~8 位。
c
du
on
TM2_CLK
TM2S.7
TM2C[7:4]
多
任
务
器
预分频
器
÷
1, 4,
16, 64
TM2C.1
分频器
8-bit
向上计数
器
÷
1 ~ 31
上限寄
存器
r
to
CLK,
IHRC,
ILRC,
EOSC
Cmp,
PA0,
~PA0,
PB0,
~PB0,
PA4,
~PA4
TM2S[6:5] TM2S[4:0]
边沿触发中断
TM2CT[7:0]
异
或
TM2B[7:0]
任
务
分
解
器
PA0
PA3
PB0
TM2C.0
TM2C[3:2]
图 10:Timer2 模块框图
Timer3 的计数输出可选择为 PA4,PA5 或 PB7。
www.jsmsemi.com
第32/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
图 11 显示出 Timer2 周期模式和 PWM 模式的时序图:
超时溢出和中断要求
超时溢出和中断要求
超时溢出和中断要求
计数值
计数值
计数值
0xFF
0x3F
上限寄存器值
上限寄存器值
0xFF
上限寄存器值
时间
事件触发
时间
事件触发
输出引脚
事件触发
时间
输出引脚
输出引脚
CR
MI
JS
时间
时间
时间
模式1 – 8位分辨率PWM模式
模式0 – 周期模式
模式1 – 6位分辨率PWM模式
图 11:Timer2 周期模式和 PWM 模式的时序图
O
程序选项” GPC_PWM “是指由比较器结果控制 PWM 波形。选用此功能后,当比较器输出为 1 时,PWM
停止输出;比较器输出为 0 时,PWM 恢复输出。如图 12 所示。
c
mi
Se
PWM Output
c
du
on
Comparator
Output
图 12:比较器控制 PWM 输出
r
to
10.2.1. Timer2、Timer3 相关寄存器
10.2.1.1. Timer2 分频寄存器(TM2S),地址 = 0x1E
位
7
初始值
0
读/写
描 述
只写
PWM 分辨率选择。
0:8 位
1:6 位或者 7 位(由程序选项 TMx_bit 控制)
6–5
00
只写
Timer2 时钟预分频器。
00:÷ 1
01:÷ 4
10:÷ 16
11:÷ 64
4–0
00000
只写
Timer2 时钟分频器。
www.jsmsemi.com
第33/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10.2.1.2. Timer2 控制寄存器(TM2C),地址 = 0x1C
位
初始值
读/写
描 述
Timer2 时钟源选择。
0000:停用
0001:CLK
0010:IHRC 或者 IHRC*2 (由程序选项 TMx_source 控制)
0011:EOSC
0100:ILRC
0101:比较器输出
1000:PA0(上升沿)
CR
MI
JS
7–4
0000
读/写
1001:~PA0(下降沿)
1010:PB0(上升沿)
1011:~PB0(下降沿)
1100:PA4(上升沿)
1101:~PA4(下降沿)
其他:保留
O
注意:在 ICE 模式且 IHRC 被选为 Timer2 定时器时钟,当 ICE 停下时,发送到定时
器的时钟是不停止,定时器仍然继续计数。
00
读/写
1
0
读/写
0
0
读/写
00:停用
01 : PA0
10 : PA3
11 : PB0
Timer2 模式选择。
0 / 1:周期模式 / PWM 模式。
启用 Timer2 反极性输出。
0 / 1:停用/启用
位
初始值
读/写
7–0
0x00
读/写
描 述
Timer2 定时器位[7:0]。
r
to
10.2.1.3. Timer2 计数寄存器(TM2CT),地址 = 0x1D
c
du
on
3–2
c
mi
Se
Timer2 输出选择。
10.2.1.4. Timer2 上限寄存器(TM2B), 地址 = 0x1F
位
初始值
读/写
7–0
0x00
只写
描 述
Timer2 上限寄存器。
10.2.1.5. Timer3 计数寄存器(TM3CT),地址 = 0x33
位
7–0
初始值
0x00
读/写
读/写
描 述
Timer3 定时器位[7:0]。
www.jsmsemi.com
第34/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10.2.1.6. Timer3 分频寄存器(TM3S),地址= 0x34
初始值
读/写
7
0
只写
6–5
00
只写
4–0
00000
描 述
PWM 分辨率选择。
0:8 位
1:6 位或 7 位(由程序选项 TMx_bit 控制)
Timer3 时钟预分频器。
00:÷ 1
01:÷ 4
10:÷ 16
11:÷ 64
Timer3 时钟分频器。
CR
MI
JS
位
只写
10.2.1.7. Timer3 上限寄存器(TM3B),地址 = 0x35
位
7–0
初始值
0x00
读/写
只写
描 述
Timer3 上限寄存器。
O
位
初始值
读/写
读/写
3–2
00
读/写
1
0
读/写
0
0
读/写
Timer3 时钟选择。
0000:停用
0001:CLK
0010:IHRC 或者 IHRC*2 (由程序选项 TMx_source 控制)
0011:EOSC
0100:ILRC
0101:比较器输出
1000:PA0(上升沿)
1001:~PA0(下降沿)
1010:PB0(上升沿)
1011:~PB0(下降沿)
1100:PA4(上升沿)
1101:~PA4(下降沿)
其他:保留
注意:在 ICE 模式且 IHRC 被选为 Timer3 定时器时钟,当 ICE 停下时,发送到定时
器的时钟是不停止,定时器仍然继续计数。
Timer3 输出选择。
00:停用
01 : PA4
10 : PA5
11 : PB7
Timer3 模式选择。
0:周期模式
1:PWM 模式
启用 Timer3 反极性输出。
0 / 1:停用/启用。
r
to
0000
描 述
c
du
on
7–4
c
mi
Se
10.2.1.8. Timer3 控制寄存器(TM3C),地址 = 0x32
www.jsmsemi.com
第35/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10.2.2. 使用 Timer2 产生定期波形
如果选择周期模式的输出,输出波形的占空比总是 50%,其输出频率与寄存器设定,可以概括如下:
输出频率 = Y ÷ [2 × (K+1) × S1 × (S2+1) ]
CR
MI
JS
这里,
Y = TM2C[7:4] : Timer2 所选择的时钟源频率
K = TM2B[7:0] : 上限寄存器设定的值(十进制)
S1 = TM2S[6:5] : 预分频器设定值 (S1 = 1, 4, 16, 64)
S2 = TM2S[4:0] : 分频器值(十进制,S2 = 0 ~ 31)
例 1:
TM2C = 0b0001_1100, Y=8MHz
TM2B = 0b0111_1111, K=127
TM2S = 0b0_00_00000, S1=1, S2=0
输出频率 = 8MHz ÷ [ 2 × (127+1) × 1 × (0+1) ] = 31.25KHz
O
例 2:
TM2C = 0b0001_1100, Y=8MHz
c
mi
Se
TM2B = 0b0000_0001, K=1
TM2S = 0b0_00_00000, S1=1, S2=0
输出频率 = 8MHz ÷ [ 2 × (1+1) × 1 × (0+1) ] =2MHz
使用 Timer2 定时器产生定期波形的示例程序如下所示:
c
du
on
void FPPA0 (void)
{
. ADJUST_IC
SYSCLK=IHRC/2, IHRC=16MHz, VDD=5V
…
TM2CT = 0x00;
r
to
TM2B = 0x7f;
TM2S = 0b0_00_00001;
// 8 位 PWM,预分频 = 1,分频 = 2
TM2C = 0b0001_10_0_0;
//系统时钟,输出 =PA3,周期模式
while(1)
{
nop;
}
}
www.jsmsemi.com
第36/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10.2.3. 使用 Timer2 产生 8 位 PWM 波形
如果选择 8 位 PWM 的模式,应设立 TM2C.1 = 1,TM2S.7 = 0,输出波形的频率和占空比可概括如下:
输出频率 = Y ÷ [256 × S1 × (S2+1) ]
输出空占比 = [( K+1 ) ÷ 256]×100%
CR
MI
JS
这里,
Y = TM2C[7:4] : Timer2 所选择的时钟源频率
K = TM2B[7:0] : 上限寄存器设定的值(十进制)
S1 = TM2S[6:5] : 预分频器设定值 (S1 = 1, 4, 16, 64)
S2 = TM2S[4:0] : 分频器值(十进制,S2 = 0 ~ 31)
例 1:
TM2C = 0b0001_1110, Y=8MHz
TM2B = 0b0111_1111, K=127
TM2S = 0b0_00_00000, S1=1, S2=0
O
输出频率 = 8MHz ÷ ( 256 × 1 × (0+1) ) = 31.25KHz
输出空占比 = [(127+1) ÷ 256] × 100% = 50%
c
mi
Se
例 2:
TM2C = 0b0001_1110, Y=8MHz
TM2B = 0b0000_1001, K = 9
TM2S = 0b0_00_00000, S1=1, S2=0
输出频率 = 8MHz ÷ ( 256 × 1 × (0+1) ) = 31.25KHz
c
du
on
输出空占比 = [(9+1) ÷ 256] × 100% = 3.9%
使用 Timer2 定时器产生 PWM 波形的示例程序如下所示:
void FPPA0 (void)
. ADJUST_IC
SYSCLK=IHRC/2, IHRC=16MHz, VDD=5V
...
TM2CT = 0x00;
r
to
{
TM2B = 0x7f;
TM2S = 0b0_00_00001;
//8 位 PWM, 预分频 = 1,分频 = 2
TM2C = 0b0001_10_1_0;
//系统时钟,输出 = PA3,PWM 模式
while(1)
{
nop;
}
}
www.jsmsemi.com
第37/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
10.2.4. 使用 Timer2 产生 6 位 PWM 波形
如果选择 6 位 PWM 的模式,应设立 TM2C.1 = 1,TM2S.7 = 1,输出波形的频率和占空比可概括如下:
输出频率 = Y ÷ [64 × S1 × (S2+1) ]
输出空占比 = [( K+1 ) ÷ 64]×100%
这里,
Y = TM2C[7:4] : Timer2 所选择的时钟源频率
K = TM2B[7:0] : 上限寄存器设定的值(十进制)
CR
MI
JS
S1 = TM2S[6:5] : 预分频器设定值 (S1 = 1, 4, 16, 64)
S2 = TM2S[4:0] : 分频器值(十进制,S2 = 0 ~ 31)
例 1:
TM2C = 0b0001_1110, Y=8MHz
TM2B = 0b0011_1111, K=63
TM2S = 0b1_00_00000, S1=1, S2=0
O
输出频率 = 8MHz ÷ ( 64 × 1 × (0+1) ) = 125KHz
输出空占比 = [(63+1) ÷ 64] × 100% = 100%
c
mi
Se
例 2:
TM2C = 0b0001_1110, Y=8MHz
TM2B = 0b0000_0000, K=0
TM2S = 0b1_00_00000, S1=1, S2=0
输出空占比 = [(0+1) ÷ 64] × 100% =1.5%
c
du
on
输出频率 = 8MHz ÷ ( 64 × 1 × (0+1) ) = 125KHz
r
to
www.jsmsemi.com
第38/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11. 特殊功能
11.1. 比较器
PFC161 内置一个硬件比较器,硬件框图如图 13。它可以比较两个输入端之间的信号大小。进行比较的两
个信号,一个是正输入,另一个是负输入。正输入由寄存器 GPCC.0 选择;负输入由 GPCC[3:1] 选择。
比较器输出的结果可以:
(1) 由 GPCC.6 读取出来;
CR
MI
JS
(2) 由 GPCC.4 选择输出信号是否反极性;
(3) 由 GPCC.5 选择是否由 Time2(TM2_CLK)采样输出;
(4) 由 GPCS.7 选择是否输出到 PA0;
(5) 产生中断信号。
8R
8R
GPCS[3:0]
R
M
U
X
1
MUX
R
GPCS.4=0
GPCS.4=1
MUX
中断请求
GPCC.4
+
Timer 2 时钟
TM2_CLK
D
F
F
M
U
X
X
O
R
GPCC.6
r
to
101
R
c
du
on
000
001
010
011
0
PA4
R
Vinternal R
GPCC[3:1]
PB7
8R
c
mi
Se
GPCS.5=1
GPCS.5=0
PA3
PA4
Bandgap
16 stages
O
VDD
到 PA0
GPCC.5
GPCC.0
GPCS.7
图 13 :比较器硬件图框
www.jsmsemi.com
第39/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.1.1. 比较器控制寄存器(GPCC),地址= 0x18
位
初始值
读/写
7
0
读/写
描 述
启用比较器。0 / 1 :停用/启用
当此位被设置为启用,请同时设置相应的模拟输入引脚是数字停用,以防止漏电。
比较器结果。
6
-
只读
0:正输入 < 负输入
1:正输入 > 负输入
选择比较器的结果是否由 TM2_CLK 采样输出。
5
0
读/写
0:比较器的结果没有 TM2_CLK 采样输出
CR
MI
JS
1:比较器的结果是由 TM2_CLK 采样输出
选择比较器输出的结果是否反极性。
4
0
读/写
0:比较器输出的结果没有反极性
1:比较器输出的结果是反极性
选择比较器负输入的来源。
000:PA3
O
001:PA4
3–1
000
读/写
010:内部 1.20 V Bandgap 参考电压(不适用于比较器唤醒功能)
100:保留
c
mi
Se
011:Vinternal R
101:PB7(仿真器不支持)
11X:保留
选择比较器正输入的来源。
0
读/写
0:Vinternal R
1:PA4
11.1.2. 比较器选择寄存器(GPCS),地址 = 0x19
位
初始值
读/写
c
du
on
0
描 述
7
0
只写
0 / 1:停用/启用。
r
to
比较器输出启用(到 PA0)。
(仿真时,如果比较器输出到 PA0,则 PA3 会被设为输出。实际 IC 没有此问题)
比较器唤醒启用。(gpcc.6 发生电平变化时才可唤醒)
6
0
只写
5
0
只写
选择比较器参考电压 Vinternal R 最高的范围。
4
0
只写
选择比较器参考电压 Vinternal R 最低的范围。
3–0
0000
只写
0/1:停用/启用
选择比较器参考电压 Vinternal R。
0000(最低)~ 1111(最高)
www.jsmsemi.com
第40/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.1.3. 内部参考电压 (Vinternal R)
内部参考电压 Vinternal
R
由一连串电阻组成,可以通过寄存器 GPCS[5:0]来设置具体数值,范围从
(1/32)*VDD 到 (3/4)*VDD。寄存器 GPCS 的位 4 和位 5 用来选择 Vinternal R 的最高和最低值;位[3:0]用于选
择所要的电压水平,这电压水平是由 Vinternal R 的最高和最低值均分 16 等份。
O
CR
MI
JS
c
mi
Se
图 14 :Vinternal R 硬件接法 (GPCS.5=0 & GPCS.4=0)
c
du
on
r
to
图 15: Vinternal R 硬件接法 (GPCS.5=0 & GPCS.4=1)
www.jsmsemi.com
第41/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
CR
MI
JS
图 16 :Vinternal R 硬件接法 (GPCS.5=1 & GPCS.4=0)
O
c
du
on
c
mi
Se
r
to
图 17 :Vinternal R 硬件接法 (GPCS.5=1 & GPCS.4=1)
www.jsmsemi.com
第42/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.1.4. 使用比较器
例一:
选择 PA3 为负输入和 Vinternal R 的电压为(18/32)*VDD 作为正输入。Vinternal R 选择上图 GPCS[5:4] = 2b’00
的配置方式,GPCS[3:0] = 4b’1001 (n=9) 以得到 Vinternal R = (1/4)*VDD + [(9+1)/32]*VDD = [(9+9)/32]*VDD
= (18/32)*VDD 的参考电压。
= 0b0_0_00_1001;
= 0b1_0_0_0_000_0;
// Vinternal R = VDD*(18/32)
// 启用比较器,负输入:PA3,正输入:Vinternal R
CR
MI
JS
GPCS
GPCC
// 停用 PA3 数字输入防止漏电(x:由客户自定)
PADIER = 0bxxxx_0_xxx;
或者
$ GPCS
VDD*18/32;
$ GPCC
Enable, N_PA3, P_R;
//
N_xx 是负输入,P_R 代表正输入是内部参考电压
O
PADIER = 0bxxxx_0_xxx;
c
mi
Se
例二:
选择 Vinternal R 为负输入,Vinternal R 的电压为(22/40)*VDD,选择 PA4 为正输入,比较器的结果反极性并
输出到 PA0。Vinternal R 选择上图的配置方式 “GPCS[5:4] = 2b’10” 和 GPCS[3:0] = 4b’1101 (n=13) 得到
GPCS
GPCC
PADIER
c
du
on
Vinternal R = (1/5)*VDD + [(13+1)/40]*VDD = [(13+9)/40]*VDD = (22/40)*VDD。
// 输出到 PA0,Vinternal R = VDD*(22/40)
// 反极性输出,负输入=Vinternal R,正输入=PA4
= 0b1_0_10_1101;
= 0b1_0_0_1_011_1;
// 停用 PA4 数字输入防止漏电(x:由客户自定)
= 0bxxx_0_xxxx;
$ GPCS
Output, VDD*22/40;
$ GPCC Enable, Inverse, N_R, P_PA4; //
r
to
或者
N_R 代表负输入是内部参考电压,P_xx 是正输入
PADIER = 0bxxx_0_xxxx;
注意:当选择 PA0 做比较器结果输出时,GPCS 会影响 PA3 的仿真输出功能,但不影响实际 IC 的功
能,请在仿真时需避开这个情况。
www.jsmsemi.com
第43/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.1.5. 使用比较器和 Bandgap 参考电压生成器
内部 Bandgap 参考电压生成器可以提供 1.20V ,它可以测量外部电源电压水平。该 Bandgap 参考电
压可以选做负输入去和正输入 Vinternal R 比较。Vinternal R 的电源是 VDD,
利用调整 Vinternal R 电压水平和 Bandgap
参考电压比较,就可以知道 VDD 的电压。
如果 N(GPCS[3:0]十进制)是让 Vinternal R 最接近 1.20V ,那么 VDD 的电压就可以透过下列公式计算:
对于 Case 1 而言:VDD = [ 32 / (N+9) ] * 1.20 volt ;
CR
MI
JS
对于 Case 2 而言:VDD = [ 24 / (N+1) ] * 1.20 volt ;
对于 Case 3 而言:VDD = [ 40 / (N+9) ] * 1.20 volt ;
对于 Case 4 而言:VDD = [ 32 / (N+1) ] * 1.20 volt ;
例一:
$ GPCS
VDD*12/40;
O
$ GPCC Enable, BANDGAP, P_R;
//
4.0V * 12/40 = 1.2V
//
BANDGAP 是负输入,P_R 代表正输入是内部参考电压
….
(GPC_Out)
{
...
}
else
...
}
//
或写成 GPCC.6
//
当 VDD﹥4V
//
当 VDD﹤4V
c
du
on
{
c
mi
Se
if
r
to
www.jsmsemi.com
第44/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.2.
触摸功能
PFC161 包含一个触摸检测电路,其功能框图如图 18 所示。
O
CR
MI
JS
c
du
on
c
mi
Se
图 18:触摸检测电路功能框图
PFC161 中的触摸检测电路采用电容感应的方法,检测手指的虚拟对地电容或感应极片之间的电容。
r
to
使用该功能时,需要在 PA7/CS 引脚或 PB7/CS 引脚与 GND 之间连接一颗精确的、X7R 材质的外部电
容器 CS。用户可以通过程序选项 CS_Sel 选择 PA7 或 PB7 中的一个作为 CS 引脚。当 CS 引脚被选中时,
另一个引脚可以像其他 IO 一样被选择为触摸按键。
启动触摸检测过程时,用户应遵循以下步骤:
1.通过设置 TKE1 和 TKE2 寄存器选择要测量的感应极片(引脚)。每次只能选择一个引脚。
2.通过在 TCC 寄存器中写入“0x10”来发出 Touch START 命令。电容 CS 将首先自动放电到 VSS。放
电时间可以透过寄存器 TS[1:0]从 32,64 和 128 个触摸电路时钟周期中选择。
www.jsmsemi.com
第45/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
3.电容值越大,将电容器完全放电到 VSS 所需的放电时间就越长。然而,在某些情况下,128 个触摸
时钟可能仍然不够长,不足以将 CS 电容完全放电。此时,用户应该手动将“0x30”写入 TCC 寄存器,
而不是“0x10”。在由用户控制的一定放电时间之后,用户可以发出 Touch START (0x10)命令来继
续此触摸转换进程。或者用户也可以通过将“0x00”写入 TCC 寄存器来中止转换进程。
4.放电后,CS 会在每个触摸时钟周期(TK_CLK)朝着 VCC 充电。充电速度由所选感应极片的电容
值决定。
CR
MI
JS
5.当充电过程中的电压达到内部产生的阈值电压(VREF)时,充电过程将自动停止。程序通过读取
TCC[6:4]或 INTRQ[3]来判断充电过程是否停止。VREF 电压可以通过寄存器 TS[3:2],在 0.2*VCC、
0.3*VCC、0.4*VCC 和 0.5*VCC 之间选择。
6.经过读取触摸计数器 TKCH 和 TKCL 的值,用户可监测感应极片上的电容量变化。 读取到的值与
CS 和 CP 的比例有关,而 CP 表示电容可以通过因用户手指的触摸而变化的 PCB,导线和触摸板
O
的组合的总电容。一旦 CP 值被改变,将 CS 充电到 VREF 所需的时间缩短。通过计数时钟周期的
差异,电路可以决定触摸板是否启用。
c
du
on
c
mi
Se
r
to
图 19:触摸转换进度时序图
注意:当 VREF 电压首次设置或者中途切换参考电压选项时,请舍弃在此之后读取到的第一笔 TKCH
和 TKCL 的数据。
www.jsmsemi.com
第46/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.2.1. 触摸相关寄存器
11.2.1.1. 触摸选项寄存器(TS), 地址 = 0x20
位
初始值
读/写
描述
Touch 时钟(TK_CLK)选择。
0010: 4 MHz
0011: 2 MHz
0100: 1 MHz
7-4
读/写
-
0101: 500 kHz
CR
MI
JS
0110: 250 kHz
0111: 125 kHz
1000: ILRC
其他: 保留
Touch VREF 选择
00: 0.5 * VCC
3-2
00
读/写
01: 0.4 * VCC
O
10: 0.3 * VCC
11: 0.2 * VCC
00: reserved
1-0
00
读/写
01: 32 * CLK
10: 64 * CLK
11: 128 * CLK
11.2.1.2. 触摸充电控制寄存器(TCC), 地址 = 0x21
位
初始值
读/写
7
-
-
c
du
on
c
mi
Se
选择触摸功能启动前的放电时间(TK_DISCHG)
描述
保留
触摸控制和状态
000
6-4
-
读/写
001
011
其他
3-0
-
-
命令(W)
TK_STOP
(触摸模块掉电)
TK_RUN
(触摸启动指令)
放电
(CS 电容放电)
保留
状态(R)
r
to
数据
准备中/ 结束
运行中
放电中
保留
保留
www.jsmsemi.com
第47/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
11.2.1.3. 触摸按键使能 2 寄存器 (TKE2), 地址 = 0x22
位
初始值
读/写
描述
7-4
-
-
3
0
读/写
使能 PB0/TK11。0/1:停用/启用
2
0
读/写
使能 PA7/TK10。0/1:停用/启用
1
0
读/写
使能 PA5/TK9。0/1:停用/启用
0
0
读/写
使能 PA6/TK8。0/1:停用/启用
保留
CR
MI
JS
11.2.1.4. 触摸按键使能 1 寄存器 (TKE1), 地址 = 0x24
初始值
读/写
7
0
读/写
使能 PA0/TK7。0/1:停用/启用
6
0
读/写
使能 PA4/TK6。0/1:停用/启用
5
0
读/写
使能 PA3/TK5。0/1:停用/启用
4
0
读/写
使能 PB7/TK4。0/1:停用/启用
3-0
-
-
保留
描述
O
位
位
初始值
读/写
7-4
-
-
3-0
-
只读
c
mi
Se
11.2.1.5. 触摸按键充电计数高位寄存器(TKCH),地址= 0x2B
描述
保留
触摸按键充电计数的 tkct[11:8]
位
初始值
读/写
7-0
-
只读
描述
触摸按键充电计数的 tkct[7:0]
初始值
读/写
描述
触摸工作模式
7–6
00
R/W
r
to
11.2.1.7. 触摸参数设置寄存器 2(TPS2),地址= 0x28
位
c
du
on
11.2.1.6. 触摸按键充电计数低位寄存器(TKCL),地址= 0x2C
00: 模式 A(建议 PCB 上 CS 接 VDD)
01: 模式 B(建议 PCB 上 CS 接 GND)
1X: Reserved
5-3
000
R/W
系统保留,请填 000
2
0
R/W
系统保留,请填 0
触摸 VREF 续电维持时间选择
00: VREF 续电在 CS 放电完即断开
1–0
00
R/W
01: VREF 续电保持。(建议值)
10: VREF 续电在 CS 放电完后继续维持 64 cycles
11: VREF 续电在 CS 放电完后继续维持 128 cycles
www.jsmsemi.com
第48/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
12. 仿真注意事项
建议使用 PDK5S-I-S01 或 PDK5S-I-S02(B)仿真器。用 PDK5S-I-S01/2(B)仿真时,请注意以下几点:
(1) 用 PDK5S-I-S01/2(B)仿真时,不支援 SYSCLK=ILRC/16 和 ILRC/2。
(2) 用 PDK5S-I-S01/2(B)仿真时,不支援 PA5 当中断源。
(3) 用 PDK5S-I-S01/2(B)仿真时,不支援 GPC_PWM,TMx_source,TMx_bit,CS_Sel,Interrupt_Src0,
PA3_PA4_Drive 等 code option。
(4) 用 PDK5S-I-S01/2(B)仿真时,不支持 TM2C.GPCRS 和 TM3C.GPCRS
CR
MI
JS
(5) 用 PDK5S-I-S01/2(B)仿真时,不支援 PAPL、PBPL。
(6) 用 PDK5S-I-S01/2(B)仿真时,不支持所有触摸功能。
(7) 实际芯片的 TM2C PWM 输出是 PA0,PA3 和 PB0,但在仿真器上是 PB2,PA3 和 PB4。
(8) 实际芯片的 TM3C PWM 输出是 PA4,PA5 和 PB7,但在仿真器上是 PB5,PB6 和 PB7。
(9) 当 GPCS 选择 Output 到 PA0 输出时,PA3 的输出功能会受影响。
(10) 仿真 PWM 波形时,建议用户在程序运行期间查看波形,当仿真器暂停或单步运行时波形可能会与实际不
O
符。
(11) PDK5S-I-S01/2(B)仿真器的 ILRC 频率与实际 IC 不同,且未经校准,其频率范围大约在 34K~38KHz。
c
mi
Se
(12) 快速唤醒时间和使用 PDK5S-I-S01/2(B)仿真不同 (PDK5S-I-S01/2(B): 128 SYSCLK,PFC161: 45 ILRC)
(13) IC 的看门狗溢出时间和使用 PDK5S-I-S01/2(B)仿真不同,如下:
WDT 溢出时间
PFC161
2048 * TILRC
8192 * TILRC
MISC[1:0]=01
4096 * TILRC
MISC[1:0]=10
16384 * TILRC
MISC[1:0]=11
256 * TILRC
c
du
on
MISC[1:0]=00
PDK5S-I-S01/2(B)
16384 * TILRC
65536 * TILRC
262144 * TILRC
r
to
www.jsmsemi.com
第49/50页
�PFC161-工业级
7 触摸键 8 位 MTP 类型单片机
13. 烧录方法
请使用 PDK5S-P-003 进行烧录。PDK3S-P-002 或之前的 Writer 版本皆已不支持烧录 PFC161。
Jumper 连接:可依照烧录器软件上的说明,连接 jumper 即可。
请用户依据实际情况选择以下两种烧录模式。
13.1. 普通烧录模式
CR
MI
JS
适用范围:
单独封装 IC,并在烧录器的 IC 插座或连接分选机烧录。
合封(MCP)IC,但与 PFC161 合封的 IC 及元件不会被以下电压破坏,也不会钳制以下电压的产生。
普通烧录模式电压条件:
(1) VDD 等于 7.5V,而最大供给电流最高可达约 20mA。
O
(2) PA5 等于 6V。
(3) 其他烧录引脚(GND 除外)等于 VDD。
c
mi
Se
重要提示:
如在 handler 上对 IC 进行烧录,请务必按照 APN004 及 APN011 的指示进行。
为对抗烧录时的杂讯干扰,请于烧录时在分选机连接 IC 连接器一端的 VDD 和 GND 之间连接 0.01uF 电容。
但切忌连接标值 0.01uF 以上的电容,以免影响普通烧录模式的运行。
适用范围:
c
du
on
13.2. 限压烧录模式
在板烧录(On-board Writing),但其周边电路及组件不会被以下电压破坏,也不会钳制以下电压的产生。
r
to
请参考在板烧录章节的详细说明。
合封(MCP)IC,但与 PFC161 合封的 IC 及元件不会被以下电压破坏,也不会钳制以下电压的产生。
限压烧录模式电压条件:
(1) VDD 等于 5V,而最大供给电流最高可达约 20mA。
(2) PA5 等于 5V。
(3) 其他烧录引脚(GND 除外)等于 VDD。
若要启动限压烧录模式,请于烧录器界面上选择“MTP On-board VDD limitation” 或 “On-board Program”(请
参考烧录器 PDK5S-P-003 的用户手册)。
www.jsmsemi.com
第50/50页
�