DC Motor Driver 2x15A Lite (SKU: DRI0018)
From Robot Wiki
Contents
1 Introduction
2 Specification
3 Tutorial
o 3.1 Diagram
o 3.2 Sample Code
3.2.1 PWM mode
3.2.2 PLL mode
4 Trouble shooting
Introduction
This DC Motor Driver can be used in 4WD mobile robot platforms,Combat robots, smart car
competition, to drive pumps, electric fans, conveyors, etc... This module uses 4 highperformance & high-current driver chips——BTS7960 with the function of current short, over
temperature,over voltage protection. You can control 2 motors with only 4 digital IO at the same
time. Dual 15A@13.8V max output current,good responsiveness & braking performance. Four
indicator leds are provided for easy and convenient debugging without motors.This DC Motor
Driver module is directly compatible with Arduino.
�Specification
Input Voltage:4.8‐35V
Maximum output current:15A@13.8V per channel
Peak output current:20A@13.8V per channel
PWM capability:up to 25 kHz
Interfaces:4 digital IO(2 PWM output include)
Driving mode:Dual high‐power H‐bridge driver
Other specifications:
o Galvanic isolation to protect the microcontroller
o Dual current detection diagnostic functions
o Short circuit, overheating, over‐voltage protection
Size:73x68x14mm
For applications of more than 15A per channel
o
o
Fast switching might damage the board, best to smooth it by software
Avoid higher rating motors, and use lower PWM whenever possible
Tutorial
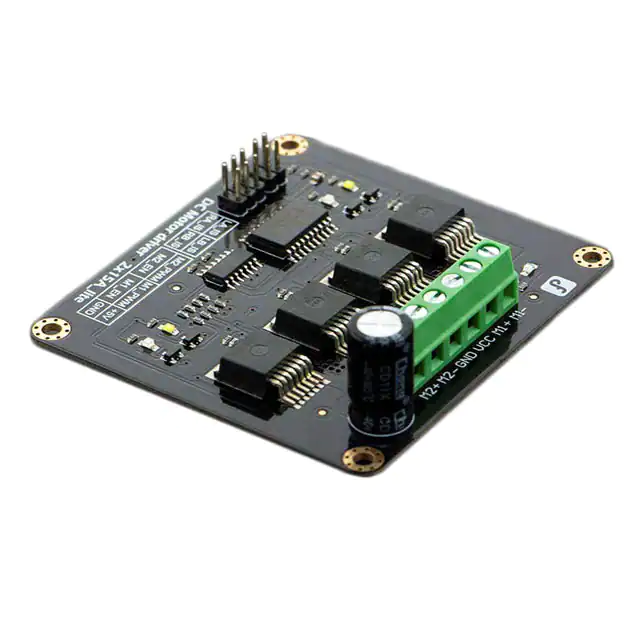
Diagram
DC Motor Driver 2x15A diagram
�LA_IS,LB_IS,RA_IS & RB_IS is for current sense and diagnosis.
In normal operation,the IS pin output a LOW level.In a fault condition,It will output a HIGH
level.The following code will show you how to do.
LA_IS and RA_IS is used for Motor1.
LB_IS and RB_IS is used for Motor2.
Sample Code
PWM mode
/*
/*
# This Sample code is for testing the DC Motor Driver 2x15A_lite module.
# Editor : Phoebe
# Date
: 2012.11.6
# Ver
: 0.1
# Product: DC Motor Driver 2x15A_lite
# SKU
: DRI0018
# Description:
# Drive 2 motors with this DC Motor Driver module
# Hardwares:
1. Arduino UNO
2. DC Motor Driver 2x15A_lite
3. DC motors x2
#Steps:
1.Connect the M1_PWM & M2_PWM to UNO digital 5 & 6
2.Connect the M1_EN & M2_EN to UNO digital 4 & 7
3.Connect +5V & GND to UNO 5V & GND
�# Function for current sense and diagnosis,if you want to use
please connect the IS pins to Arduino
Connect LA_IS and RA_IS to UNO digital 2 at the same time
Connect LB_IS and RB_IS to UNO digital 3 at the same time
*/
int E1 = 5;
//M1 Speed Control
int E2 = 6;
//M2 Speed Control
int M1 = 4;
//M1 Direction Control
int M2 = 7;
//M1 Direction Control
int counter=0;
void stop(void)
//Stop
{
digitalWrite(E1,0);
digitalWrite(M1,LOW);
digitalWrite(E2,0);
digitalWrite(M2,LOW);
}
void advance(char a,char b)
//Move forward
{
analogWrite (E1,a);
//PWM Speed Control
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void back_off (char a,char b)
//Move backward
{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void turn_L (char a,char b)
//Turn Left
�{
analogWrite (E1,a);
digitalWrite(M1,LOW);
analogWrite (E2,b);
digitalWrite(M2,HIGH);
}
void turn_R (char a,char b)
//Turn Right
{
analogWrite (E1,a);
digitalWrite(M1,HIGH);
analogWrite (E2,b);
digitalWrite(M2,LOW);
}
void current_sense()
// current sense and diagnosis
{
int val1=digitalRead(2);
int val2=digitalRead(3);
if(val1==HIGH || val2==HIGH){
counter++;
if(counter==3){
counter=0;
Serial.println("Warning");
}
}
}
void setup(void)
{
int i;
for(i=4;i 1000){
orget to connect the IS pins to Arduino
// current sense and diagnosis,if yo
//function,please show it & don't f
current_sense();
timePoint = millis();
}
*/
if(Serial.available()){
char val = Serial.read();
if(val != -1)
{
switch(val)
{
case 'w'://Move Forward
advance (255,255);
//move forward in max speed
break;
case 's'://Move Backward
back_off (255,255);
break;
case 'a'://Turn Left
turn_L (100,100);
break;
case 'd'://Turn Right
turn_R (100,100);
break;
//move back in max speed
�case 'z':
Serial.println("Hello");
break;
case 'x':
stop();
break;
}
}
else stop();
}
}
PLL mode
DRI0018 motor drive also support PLL control mode.Data is as follows:
"PLL mode"
pin
function
4
motor 1 enable control
5
motor 1 direction control
6
motor 2 direction control
7
motor 2 enable control
�Demo data:
//Standard DLL Speed control
int E1 = 4;
//M1 Speed Control
int E2 = 7;
//M2 Speed Control
int M1 = 5;
//M1 Direction Control
int M2 = 6;
//M1 Direction Control
//When m1p/m2p is 127, it stops the motor
//when m1p/m2p is 255, it gives the maximum speed for one direction
//When m1p/m2p is 0, it gives the maximum speed for reverse direction
void DriveMotorP(byte m1p, byte m2p)//Drive Motor Power Mode
{
digitalWrite(E1, HIGH);
analogWrite(M1, (m1p));
digitalWrite(E2, HIGH);
analogWrite(M2, (m2p));
}
void setup(void) {
int i;
for(i=4;i