COS1042
High-Speed CAN Transceiver
Features
General Description
■
Very Low Standby Current (5 μA,typical)
The COS1042 is a high-speed CAN, fault
■
Suitable for 12 V and 24 V systems
tolerant
■
VIO Supply Pin to interface Directly to CAN
between a Controller Area Network (CAN)
Controllers and MCU with 1.8V to 5.5V I/O
protocol controller and the physical two-wire
SPLIT Output Pin to Stabilize Common Mode
CAN bus. The COS1042 provides differential
in Biased Split Termination Schemes
transmit and receive capability for the CAN
CAN Bus Pins are Disconnected when
protocol controller, and is fully compatible with
Device is Unpowered
the ISO-11898-2 and ISO-11898-5 standards.
■
■
■
Bus Glitch-Free Power-Up and Power-Down
■
Over Temperature Protection
■
Allow Up to 128 Transceivers on the bus
■
Data Rate Up to 5Mbps
■
Half-duplex Transceiver
■
Available Packaging: SOP8/DFN8/DIP8
transceiver. It serves the interface
The COS1042 can be interfaced directly to
micro-controllers with supply voltages from
1.8V to 5.5V. It has a passive behavior to the
CAN bus when the supply voltage is off.
Applications
The COS1042 has a very low-current standby
■
Industrial Automation, Control
reliable communication in the CAN FD fast
■
CAN Networks
phase at data rates up to 5 Mbit/s.
Rev1.0
Copyright@2018 Cosine Nanoelectronics Inc. All rights reserved
The information provided here is believed to be accurate and reliable. Cosine Nanoelectronics assumes
no reliability for inaccuracies and omissions. Specifications described and contained here are subjected
to change without notice on the purpose of improving the design and performance. All of this information
described herein should not be implied or granted for any third party.
www.cosine-ic.com
mode with bus wake-up capability. It enables
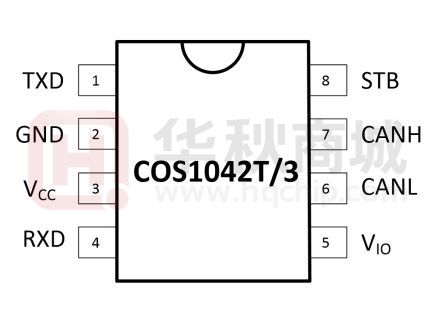
Pin Diagram
1
�COS1042
1. Pin Configuration and Block Diagram
Figure 1 Pin Diagram
Pin Description
Pin
Name
1
TXD
2
3
4
5
5
6
7
8
Description
Transmit digital data input. LOW for dominant and HIGH for
recessive bus states.
GND
VCC
RXD
Ground
Supply voltage
Receive digital data output; reads out data from the bus lines,
LOW for dominant and HIGH for recessive bus states.
SPLIT
Common-mode stabilization output; in COS1042T version only
CANL
LOW-level CAN bus I/O line
VIO
CANH
STB
Supply voltage for I/O level adapter; in COS1042T/3 version only
HIGH-level CAN bus I/O line
Standby mode control input ( Active high)
2. Ordering Information
Model
COS1042
www.cosine-ic.com
Order Number
Package
Package Option
Marking
Information
COS1042T
SOP-8
Tape and Reel, 4000
COS1042T
COS1042T/3
SOP-8
Tape and Reel, 4000
COS1042T/3
2
�COS1042
Note
1: COS1042T has the SPLIT pin.
2: COS1042T/3 has the VIO pin.
Figure 2. Block Diagram
www.cosine-ic.com
3
�COS1042
3. Product Specification
3.1 Absolute Maximum Ratings (1)
Min
Max
Unit
DC supply voltage VCC
-0.3
7
V
DC supply voltage VIO
-0.3
7
V
DC voltage at TXD, RXD, STB
-0.3
VIO + 0.3
V
DC voltage at CANH, CANL and SPLIT
-44
+44
V
RXD output current
-8
+8
mA
Operating junction temperature
-40
+125
°C
Storage temperature
-55
+150
°C
Parameter
(1) Stresses exceeding the absolute maximum ratings may damage the device. The device may not function or be operable
above the recommended operating conditions and stressing the parts to these levels is not recommended. In addition,
extended exposure to stresses above the recommended operating conditions may affect device reliability. The absolute
maximum ratings are stress ratings only.
3.2 Thermal Data
Parameter
Package Thermal Resistance
Rating
Unit
150 (SOP8)
90 (DIP8)
57 (DFN8,3x3)
°C/W
3.3 Recommended Operating Conditions
Parameter
Min.
Typ.
Max.
Unit
VCC Supply voltage
4.5
5.0
5.5
V
VIO Supply voltage on Pin VIO
2.8
3.3
5.5
V
Operating ambient temperature
-40
+85
°C
Operating junction temperature
-40
+125
°C
www.cosine-ic.com
4
�COS1042
3.4 DC Characteristics
(Typical values are tested at TA=25 oC, VCC=4.5V to 5.5V, VIO=2.8V to 5.5V, RL=60Ω, unless otherwise
specified.)
Parameter
Sym.
Conditions
Min.
Typ.
Max.
Unit
VCC
4.5
5.0
5.5
V
Undervoltage detection voltage VUVD
3.5
4.0
4.5
V
Hysteresis of UVD comparator VUVDH
0.3
0.5
0.8
V
Recessive; VTXD=VIO
-
4
10
mA
Dominant; VTXD=0V
-
22
40
mA
COS1042T
-
12
17
μA
COS1042T/3
-
-
1
μA
2.8
-
5.5
V
1.3
2.0
2.7
V
Normal mode; VTXD=0 or VIO
-
20
200
μA
Standby mode;
-
12
17
μA
-0.1
0
+0.1
V
0.5VCC
3
mV
Vcc Supply
Voltage range
Supply current
ICC
Standby current
ICCS
VIO Supply
Digital Supply voltage range
VIO
Undervoltage detection voltage VUVIO
Supply current
IVIO
BUS Line (CANH; CANL) Transmitter
Standby mode
output voltage
Recessive
output voltage
VO(S)
VO(R)
Recessive
Differential output voltage
VO(DIFF)
Recessive
Short circuit output current
IO(SC)
Dominant
output voltage
VO(D)
Dominant
Differential output voltage
www.cosine-ic.com
VO(DIFF)
Standby mode,
no load
Normal mode, VTXD=VIO,
no load
2
VTXD=VIO
-50
0
50
mV
VTXD=VIO, no load
-500
0
50
mV
Normal mode,
VCANH=VCANH=-27V to +32V
-5
+5
mA
Pin CANH, VTXD=0V
2.75
3.5
4.5
V
Pin CANL, VTXD=0V
0.5
1.5
2.25
V
Dominant, Normal mode,
VTXD=0V
1.5
2.0
3.0
V
5
�COS1042
Dominant
Output voltage symmetry
-400
0
400
mV
CANH; VTXD=0, VCANH=0V
-120
-70
-40
mA
CANL; VTXD=0, VCANL=18V
40
85
120
mA
-1.0
-
+0.5
V
-1.0
-
+0.4
V
0.9
-
VDD
V
1.0
-
VDD
V
0.5
0.7
0.9
V
0.4
-
1.15
V
50
-
200
mV
RIN
10
15
25
kΩ
Common mode resistance
matching
RIN(M)
-1
-
+1
%
Differential input resistance
RIN(DIFF)
20
30
50
kΩ
Common mode input
capacitance
CIN(CM)
-
-
20
pF
Differential input capacitance
CIN(DIFF)
-
-
10
pF
+5
μA
0.7VCC
V
0.45VCC 0.5VCC 0.55VCC
V
Dominant
Short circuit output current
VO(D)(M) VDD-VCANH-VCANL
IO(SC)
BUS Line (CANH; CANL) Receiver
Normal mode;
Recessive Differential input
voltage
VDIFF(RI)
12V VCANH,CANL +12V;
Standby mode;
12V VCANH,CANL +12V;
Normal mode;
Dominant Differential input
voltage
VDIFF(DI)
12V VCANH,CANL +12V;
Standby mode;
12V VCANH,CANL +12V;
Normal mode;
Differential Receiver Threshold VTH(DIFF)
12V VCANH,CANL +12V;
Standby mode;
12V VCANH,CANL +12V;
Differential Input Hysteresis
Common mode input
resistance
Input leakage current
VHYS(DIFF)
ILI
Normal mode
VCC = VTXD = VSTB = 0V;
VCANH = VCANL = 5V
-5
SPLIT; Common Mode Stabilization Output Pin (only for COS1042T)
Output voltage
VO
Leakage current
IL
Normal mode;
ISPLIT = -500μA to +500μA
Normal mode;
RL = 1MΩ
Standby mode;
VSPLIT = -24V to +24V
0.3VCC
0.5VCC
-5
+5
μA
TXD, STB Digital Input Pin
HIGH-level input voltage
VIH
0.7VIO
-
VIO+0.3
V
LOW-level input voltage
VIL
-0.3
-
0.3VIO
V
HIGH-level input current
IIH
-1
+1
μA
www.cosine-ic.com
6
�COS1042
TXD:LOW-level input current IIL(TXD)
STB:LOW-level input current
IIL(STB)
-270
-150
-30
μA
-20
-
-1
μA
RXD Receive Data Output Pin
HIGH-level output voltage
VOH
IOH=-4mA
VIO-0.4
-
-
V
LOW-level output voltage
VOL
IOL=4mA
-
-
0.4
V
TJ(SD)
160
170
180
°C
TJ(HYST)
20
30
40
°C
Thermal Shutdown
Shutdown
junction temperature
Shutdown
temperature Hysteresis
3.5 Dynamic Characteristics
(Typical values are tested at TA=25 oC, VCC=4.5V to 5.5V, VIO=1.8V to 5.5V, RL=60Ω, unless otherwise
specified. See Figure 6,7,8)
Parameter
Sym.
Delay TXD Low to bus dominant
tTXD-BUSON
Min.
Typ.
Max.
Unit
Normal mode
-
65
-
ns
Delay TXD High to bus recessive tTXD-BUSOFF Normal mode
-
60
-
ns
Delay bus dominant to RXD
tBUSON-RXD Normal mode
-
65
-
ns
Delay bus recessive to RXD
tBUSOFF-RXD Normal mode
-
65
-
ns
Propagation delay TXD Low
to RXD Low
Propagation delay TXD High
to RXD High
Bus wake-up filter time
Delay standby to normal mode
Conditions
tTXDL-RXDL
Normal mode
-
-
220
ns
tTXDH-RXDH
Normal mode
-
-
220
ns
tFLTR(WAKE)
Standby mode
0.5
1
4
μs
2
3
10
μs
tWAKE
Negative edge on STB
TXD dominant time-out time
Tto(dom)TXD VTXD=0V, Normal mode
0.3
2
5
ms
Bus dominant time-out time
Tto(dom)BUS Standby mode
0.3
2
5
ms
4. Functional Description
4.1 Operating Mode
The COS1042 supports two operating modes, Normal and Standby, which are selected via pin STB.
See Table 1 for a description of the operating modes under normal supply conditions.
www.cosine-ic.com
7
�COS1042
Table 1. Operating Modes
Mode
STB
DRIVER
RECEIVER
Normal
LOW
Enable
(ON)
Standby
HIGH
Disable
(OFF)
Enable
(ON)
Only low power
Bus monitor is
active
RXD
LOW
HIGH
Bus dominant
Bus recessive
Wake-up request
detected
No wake-up request
detected
4.1.1 Normal Mode
A LOW level on pin STB selects Normal mode. In this mode, the transceiver can transmit and
receive data via the bus lines CANH and CANL (see Figure 2 for the block diagram). The differential
receiver converts the analog data on the bus lines into digital data which is output to pin RXD. The
slopes of the output signals on the bus lines are controlled internally and are optimized in a way that
guarantees the lowest possible EME.
4.1.2 Standby Mode
A HIGH level on pin STB selects Standby mode. In Standby mode, the transceiver is not able to
transmit or correctly receive data via the bus lines. The transmitter and Normal-mode receiver blocks
are switched off to reduce supply current, and only a low-power differential receiver monitors the bus
lines for activity. The wake-up filter on the output of the low-power receiver does not latch bus
dominant states, but ensures that only bus dominant and bus recessive states that persist longer
than tfltr(wake)bus are reflected on pin RXD. In Standby mode, the bus lines are biased to ground to
minimize the system supply current. The low-power receiver is supplied by VIO, and is capable of
detecting CAN bus activity even if VIO is the only supply voltage available. When pin RXD goes LOW
to signal a wake-up request, a transition to Normal mode will not be triggered until STB is forced
LOW.
4.2 Fail-Safe Features
4.2.1 TXD Dominant Time-out Function
A ‘TXD dominant time-out’ timer is started when pin TXD is set LOW. If the LOW state on pin TXD
persists for longer than tto(dom)TXD, the transmitter is disabled, releasing the bus lines to recessive
state. This function prevents a hardware and/or software application failure from driving the bus lines
to a permanent dominant state (blocking all network communications). The TXD dominant time-out
timer is reset when pin TXD is set to HIGH. The TXD dominant time-out time also defines the
minimum possible bit rate of 40 kbit/s.
www.cosine-ic.com
8
�COS1042
4.2.2 Bus Dominant Time-out Function
In Standby mode a 'bus dominant time-out' timer is started when the CAN bus changes from
recessive to dominant state. If the dominant state on the bus persists for longer than tto(dom)bus, the
RXD pin is reset to HIGH. This function prevents a clamped dominant bus (due to a bus short-circuit
or a failure in one of the other nodes on the network) from generating a permanent wake-up request.
The bus dominant time-out timer is reset when the CAN bus changes from dominant to recessive
state.
4.2.3 Internal Biasing of TXD and STB Input Pins
Pins TXD and STB have internal pull-ups to VIO to ensure a safe, defined state in case one or both of
these pins are left floating. Pull-up currents flow in these pins in all states; both pins should be held
HIGH in Standby mode to minimize standby current.
4.2.4 Undervoltage Detection on Pins Vcc and VIO
Should VCC drop below the VCC undervoltage detection level, VUVD(VCC), the transceiver will switch to
Standby mode. The logic state of pin STB will be ignored until VCC has recovered. Should VIO drop
below the VIO undervoltage detection level, VUVD(VIO), the transceiver will switch off and disengage
from the bus (zero load) until VIO has recovered.
4.2.5 Over-temperature Protection
The output drivers are protected against over-temperature conditions. If the virtual junction
temperature exceeds the shutdown junction temperature, Tj(sd), the output drivers will be disabled
until the virtual junction temperature falls below Tj(sd) and TXD becomes recessive again. Including
the TXD condition ensures that output driver oscillation due to temperature drift is avoided.
4.2.6 Unpowered Device
The COS1042 is designed to be “ideal passive” or “no load” to the CAN bus if it is unpowered. The
bus terminals (CANH, CANL) have extremely low leakage currents when the device is unpowered to
avoid loading down the bus. This is critical if some nodes of the network are unpowered while the
rest of the of network remains in operation. The logic terminals also have extremely low leakage
currents when the device is unpowered to avoid loading down other circuits that may remain
powered.
www.cosine-ic.com
9
�COS1042
4.2.7 Floating Terminals
The COS1042 has internal pull ups on critical terminals to place the device into known states if the
terminals float. The TXD terminal is pulled up to VCC or VIO to force a recessive input level if the
terminal floats. The STB terminal is also pulled up to force the device into low power Standby mode if
the terminal floats.
4.2.8 CAN Bus Short Circuit Current Limiting
The COS1042 has The device has two protection features that limit the short circuit current when a
CAN bus line is short-circuit fault condition: driver current limiting (both dominant and recessive
states) and TXD dominant state time out to prevent permanent higher short circuit current of the
dominant state during a system fault.
4.3 SPLIT Output Pin and VIO Supply Pin
Two versions of the COS1042 are available, only differing in the function of a single pin. Pin 5 is
either a SPLIT output pin or a VIO supply pin. Using the SPLIT pin on the COS1042T in conjunction
with a split termination network (see Figure 3 and Figure 4) can help to stabilize the recessive
voltage level on the bus. This will reduce EME in networks with DC leakage to ground (e.g. from
deactivated nodes with poor bus leakage performance). In Normal mode, pin SPLIT delivers a DC
output voltage of 0.5VCC. In Standby mode or when VCC is off, pin SPLIT is floating. When not used,
the SPLIT pin should be left open.
Pin VIO on the COS1042T/3 should be connected to the micro-controller supply voltage (see Figure
5). This will adjust the signal levels of pins TXD, RXD and STB to the I/O levels of the
micro-controller. Pin VIO also provides the internal supply voltage for the low-power differential
receiver of the transceiver. For applications running in low-power mode, this allows the bus lines to
be monitored for activity even if there is no supply voltage on pin VCC. For versions of the COS1042
without a VIO pin, the VIO input is internally connected to VCC. This sets the signal levels of pins TXD,
RXD and STB to levels compatible with 5 V micro-controllers.
www.cosine-ic.com
10
�COS1042
Figure 3. Stabilization Circuitry and Application for Version with SPLIT Pin
5. Typical Application Diagrams
Figure 4. Typical Application with COS1042T and a 5V Micro-controller
www.cosine-ic.com
11
�COS1042
Figure 5. Typical Application with COS1042T/3 and a 3V Micro-controller
Figure 6. Test Circuit for Measuring Transceiver Driver Symmetry
www.cosine-ic.com
12
�COS1042
Figure 7. CAN Transceiver Timing Diagram
Figure 8. CAN FD Timing Definition According to ISO11898-2
www.cosine-ic.com
13
�COS1042
6. Package Information
6.1 SOP8 (Package Outline Dimensions)
6.2 DIP8 (Package Outline Dimensions)
www.cosine-ic.com
14
�